电压-相角下垂控制的微电网控制策略设计研究
2020-07-15 02:17吴萍
黄冈职业技术学院学报 2020年2期
吴 萍
(三门峡职业技术学院 电气工程学院,河南 三门峡 472000)
所谓微电网,其实就是将微电源、负荷和电力电子装置等整合成一个独立可控的小型发电系统,相比于传统的配电网,其更加节能环保,而且使用起来也会更加便捷。目前阶段,微电网的电源主要有以下几种,即光伏电池、燃料电池、微型燃气轮机等等分布式电源。
1 微电网结构及其运行方式分析
1.1 本文研究的微电网结构
在本篇文章中,主要对以下微电网结构进行详细地解释,如图1。

图1 微电网结构
此种微电网结构具有三个分散的DG 单元、一个负荷通过线路、以及开关并联母线等等。
1.2 微电网的两种运行模式
微电网在实际的运行中一共有两种运行模式即并网的运行模式和孤岛的运行模式,而且通常情况下并网和孤岛两种运行模式还能进行无缝转换。微电网中使用的逆变器,通常情况下只有PQ控制或电压源逆变器(VSI),这两种控制方法相比于其他传统的方式更加便捷,只需逆变器的当地信息就可以进行后续的工作。而当其中逆变器采用的是PQ 控制的逆变器时,那么在实际的运行过程中其输出功率将由相关工作人员进行设定,相关的数值的设定需要按照微电网的运行需求进行,其大小不会受到微电网内部功率变化的影响,其与VSI 控制的逆变器相比较,其适用的范围更广,几乎可以用于所有的分布式电源;而当在微电网的实际运行中使用VSI 控制的逆变器时,那么微电网的实际输出功率将会受到微电网内部功率的变化的直接影响,即由其完全决定,其与PQ控制的逆变器相比较刚好是两种相反的情况。当微电网采用并网的模式运行时,那么通常情况下都需要由配电网VSI 采用控制的DG 单元为其提供电压和频率支撑,进而才能保证其能够正常的运行。除此之外,在实际的控制中,人们通常情况下都会使用电压—频率下垂控制产生参考电压,也就是v/f 控制,但是此种方法存在一定的弊端[1]。
2 微电网控制器设计
DG 单元结构如图2 所示,图中的数据如下,Udc 为DG 单元直流侧的电压;u1为DG 单元逆变桥电压;u0为DG 单元输出电压;i1为DG 单元产生的电感电流;ic 为DG 单元中的电容电流;io则为DG 单的元中输出电流。在实际选择的过程中,可以结合微电网的运行模式,选择采用PQ控制或VSI 控制。

图2 DG 单元结构
2.1 PQ 控制器设计
PQ 控制器的结构如图3 所示:
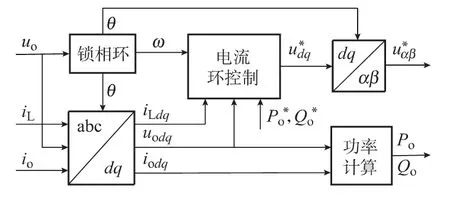
图3 PQ 控制器结构
如图中所示,其中Po 为DG 单元中的有功功率,而Qo 则为DG 单元中的无功功率,P*o、Q*o则是相关的功率参考数值;uodq、ildq、iodq 分别为uo,iL 和io 在dq 轴上的一个分量;u*dq 则为
控制器产生的相关的电压信号在dq 轴上的一个分量,而u*αβ则为微电网中控制器产生的电压信号在αβ轴上的一个分量,ω为角频率;θ为坐标变换角。电流环控制器结构如图4 所示:

图4 电流环控制器结构
uod 和uoq 分别为uo 的d轴和q轴分量,iLd和iLq 分别为iL 的d轴和q轴分量,i*Ld 为电感电流参考值的d轴,i*Lq 则为电感电流参考值在q轴上的一个分量,u*d为逆变桥调制电压信号在d轴上的一个分量,u*q为逆变桥调制电压信号在q轴上的一个分量[2]。
2.2 VSI 控制器设计
VSI 控制器结构如图5 所示
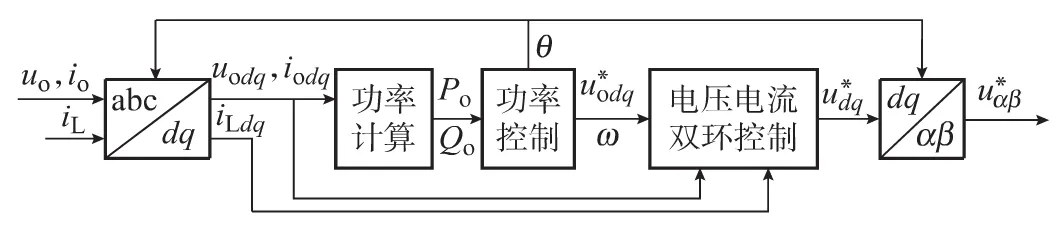
图5 VSI 控制器结构
图中: u*odq 为DG 控制单元的输出电压参考值在dq轴上的分量。结合本篇文章中的图2,可以得出这样的两个公式,即DG 单元的输出功率为P o=1.5/Z(U om Em cos(δ-δe-φ)-E2mCosφ)(1):QO=1.5/Z(-U om Em sin(δδe-φ)-E2msinφ)(2)。其中:U om 为DG单元的总体输出电压幅值,而E m则为DG 单元中母线1 的电压幅值,而δ为DG 单元中的输出电压相角,δe则为DG 单元母线电压相角;Z 为线路阻抗,φ为线路相角。根据微电网线路具有阻抗呈现阻性这一特性,可以从中得出这样的结论,即Z≈R,φ≈0,当相角差δ-δe很小时,由式(1)可以得到以下关系:U om = E m +2RP o/3E m;δ=δe-2RQ o/3U om Em,而且根据上文中的第(2)个公式也可以得出这样的结论,U om和δ大小会直接受到P o和Q o的影响。而当在微电网结构中使用电压定向控制时,在加以负反馈,那么同样可以得到DG 单元在受到电压—相角下垂控制影响下的规律,即:u*od=Uodref-mPo;δ*=δref+nQo,式中 u*od为DG 单元输出电压参考值的d轴分量,δ*分别为 DG 单元输出电压参考值的相角参考值。Uodref作为DG 单元空载时的输出电压参考值在d轴上的一个分量,δref 则为DG 单元空载时的输出电压参考值的相角参考值;电压幅值下垂系数则为上式的字母m 表示,电压幅值相角下垂系数则为上式中的字母n。因此,在实际的操作中,如果相关的工作人员想要确保DG 单元在微电网处于孤岛运行模式运行时,仍能满足其额定容量的比值,那么就需要对相关下垂系数进行调整,进而确保其能够满足m1SN1=m2SN2=m3SN3,n1SN1=n2SN2=n3SN3。本文所研究的功率控制器结构如图6 所示:即

图6 功率控制器结构
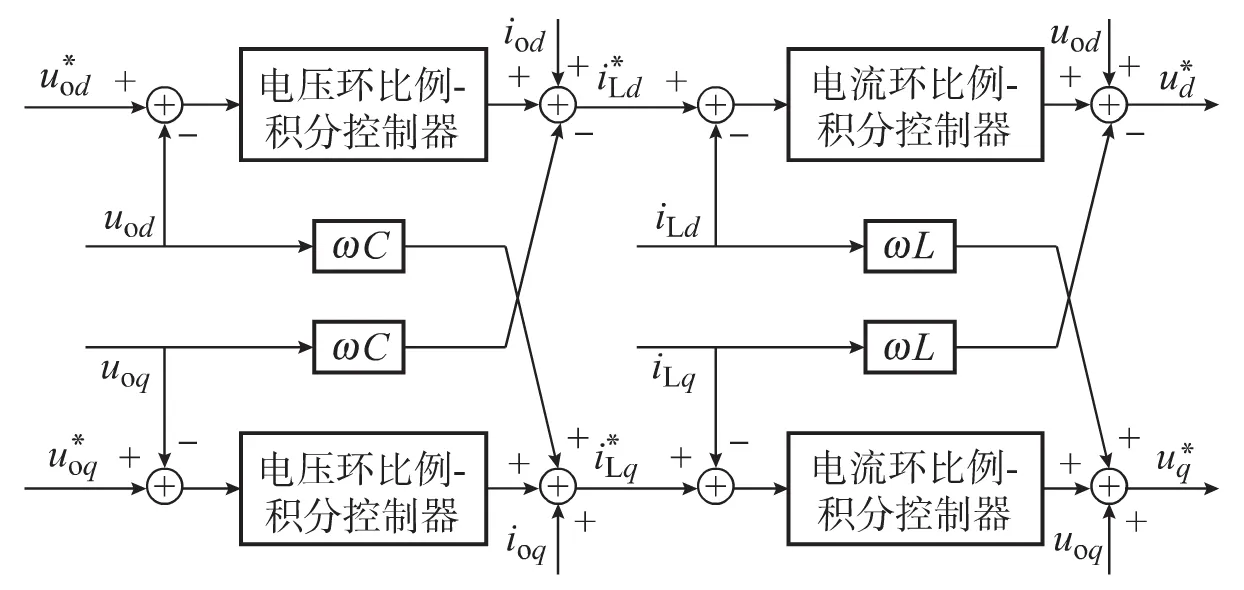
图7 电压电流双环控制器结构

图8 同步控制器结构
电压电流双环控制器结构如图7 所示。其中,iod 为i0的d轴分量,ioq 为io 的q轴分量。由上图可以得出这样的结论,即:微电网中的功率控制器所产生的输出电压参考值,需要与输出电压实际值的差值经过一系列的计算,才能进而得到电感电流参考值作为电压外环[3]。
2.3 同步控制器设计
当微电网的运行模式发生改变时,也就是由孤岛运行模式转变为并网运行模式时,首先相关的工作人员必须进行同步运行处理,只有这样才能促进微电网的电压和配电网电压逐渐趋于同步,详细点来说,就是将微电网运行中的电压幅值、相角以及频率调至相同,其中所需的同步控制器结构如图8 所示:
其中ω*为配电网的角频率;ΔUm 为图1 中开关K5 两侧的电压幅值差,Δδ则为图1 中开关K5 两侧的相角差,两者分别通过一定的处理,就促使Uodref,δref 和ω 变成Uodref′,δref ′和ω*,完成电压同步。
3 仿真分析
3.1 仿真参数
DG 单元的参数如表1 所示:
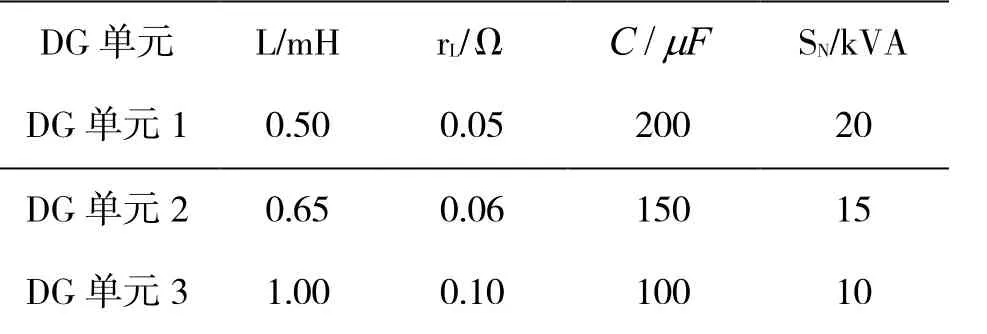
表1 DG 单元参数表
首先必须确保DG 单元中直流侧电压Udc 为700V,其次还要确保微电网线路参数R 为0.6420 Ω/km,X 为0.0830Ω/km。而配电网线路参数则需要满足R 为0.1610Ω/km,X 为0.1900Ω/km 。DG 单元的负荷处于额定有功功率为30×103W,而额定无功功率则处于20Kvar 的具有时变性的负荷。在下垂控制中,Uodef=390V, δref=Orad;m1=0.0003V/W,m2=0.0004V/W,m3 =0.0006V/W,n1 =0.0000007rad/var,n2 =0.0000008rad/var,n3=0.0000012rad/var,通过实际的试验,可以得出这样的结论,即当微电网处于孤岛模式运行时,其中DG 单元一二三的负荷功率就会按4∶3∶2 的预定进行比例分配[4]。
3.2 仿真结果
举例:第一,本次试验中,微电网将在一秒之前开始运行,并采用孤岛模式,当时间到0.6s时,将其运行模式转变为同步运行,然后当时间达到1s 时,再将其连接到配电网中,并将其运行模式转变为并网运行的模式,当时间达到1.5s 时,再将微电网与配电网之间的链接断开,同时将其运行模式转变为孤岛运行的模式,根据以上操作可以得到以下的仿真结果,如下图所示。下图中,图9 表明DG 单元在当微电网处于孤岛运行模式时,那么就可以根据其负荷功率的变化,按照相关的规定,按比例对其进行负荷功率的分配,进而就能促进微电网功率达到平衡。但是在微电网的运行模式变为并网模式时,其运行将不会被负荷功率的变化影响,在这个时候,只需输入一定的设定值,那么就可以进行相应功率的输出。第图12则表示由于在微电网的运行受到同步控制器的作用,导致微电网中的母线1 受到影响,出现降低频率的现象,进而经过一系列的反应就能实现电压相角同步的目的,最后达到电压频率同步的目的。而图13 则表明当微电网的运行模式由孤岛运行转变为同步运行时,将会受到微电网中同步控制器的直接影响,在其作用下微电网的开关K5 两侧的电压就会逐渐变为一致,然后使得微电网和配电网之间电压达到同步。而第六幅图则表明当微电网的运行模式发生转变时,相关的工作人员必须要确保电网中开关K5 处没有冲击电流。

图9 DG 单元孤岛运行负荷功率变化

图10 DG 单元同步运行负荷功率变化
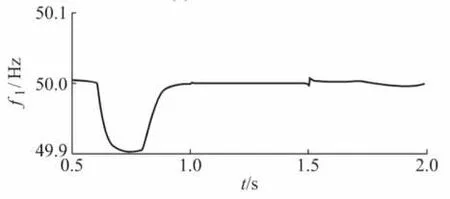
图11 DG 单元同步运行负荷功率变化

图12 DG 单元同步运行负荷功率变化

图13 DG 单元同步运行负荷功率变化
第二:微电网孤岛运行时,使用电压—相角下垂控制仿真结果如图14 所示:

图14 电压—相角下垂控制仿真
图9 和图10 表明由于微电网在实际的运行会受到电压幅值下垂控制的作用,导致微电网中的母线1 电压幅值会因为DG 单元输出功率的变化的影响而发生相应地改变,当微电网的有功功率降低时,其会适当得增加,反之则同理,在变化过程中要想实现DG 单元按比例对负荷有功功率进行分配的目的,就需要相关的工作人员进行相应的操作。而图10 和图12 则表示,微电网在实际的运行过程往往会因为受到电压—相角下垂控制影响,导致微电网中的母线1 的电压频率受到DG 单元输出无功功率的影响,这个时候,就需要相关的工作人员在微电网工频附近进行微小的调整,进而才能达到DG 单元按预定比例分配的目的。
而使用电压—频率下垂控制其仿真结果则如下图15:

图15 电压—频率下垂控制其仿真结果
图9 和图10 表示由于微电网运行时会受到电压幅值下垂控制的影响,这样一来就会导致微电网中母线1 的电压幅值发生相应的改变,在有功功率减小,其会适当得增加,反之则同理,在变化过程中实现DG 单元按预定比例分配负荷有功功率。而图10 和图12 则表示由于微电网运行的过程中,会受到电压—频率下垂控制的影响,导致其母线1 的电压频率会随着DG 单元输出无功功率的改变而进行相应地改变,而当DG 单元输出的无功功率变大时,其电压频率就会略微地升高,反之则同理。通过大量的对比实验,可以从中得出这样的结论,即:使用电压—相角下垂控制来替代微电网中电压—频率下垂控制的作用,就可以促使微电网处于孤岛模式运行时拥有更接近于工频的运行频率[5]。
4 结束语
综上所述,目前阶段随着我国社会的不断发展进步,电力企业的相关管理人员必须不断地对配电网结构进行完善,进而才能满足社会的发展需求。因此其必须对微电网技术进行重视,加大对其研究力度,进而才能为人们提供更加稳定可靠的供电需求、更便捷的服务,同时还能有效地降低电力企业对于能源的损耗以及对自然环境的污染,为我国的长远发展打下良好的基础。
猜你喜欢
装备维修技术(2022年7期)2022-07-01
振动与冲击(2022年10期)2022-05-30
新疆大学学报(自然科学版)(中英文)(2020年2期)2020-07-25
医学新知(2019年4期)2020-01-02
新高考·高一数学(2019年4期)2019-09-07
电子制作(2018年1期)2018-04-04
中西医结合心血管病杂志(电子版)(2018年26期)2018-01-14
浙江中西医结合杂志(2017年5期)2017-06-08
电子制作(2017年7期)2017-06-05