自动锁模光纤激光器研究进展
2020-07-06 03:35
中兴通讯技术 2020年2期
(上海交通大学,上海 200240)
(Shanghai Jiao Tong University, Shanghai 200240, China)
一直以来,超短脉冲因为其峰值功率高、脉宽窄和连续光谱宽等特点而被广泛应用于各个领域中,如光学频率测量[1]、高分辨率原子钟[2]、信号处理[3]以及测距[4]等。被动锁模光纤激光器(MLFL)作为产生飞秒脉冲的主要手段,是目前光电子技术领域最前沿、最活跃的研究方向之一。在众多实现锁模的方式中,基于非线性偏振旋转(NPR)的被动锁模方式因其结构简单和输出脉宽窄而被广泛研究;然而,NPR锁模中的偏振控制始终是一个难题,尤其是想要获得谐波锁模(HML)和调Q锁模(QML)等多种输出状态时,对偏振控制的精准性要求大幅上升。首先,传统的手调偏振的方式往往非常耗时而且很难找到基频锁模(FML)之外的脉冲状态。其次,环境的扰动(如温度和压力变化)会导致基于NPR的MLFL腔内的偏振态发生漂移从而导致激光器频繁失锁(失去脉冲状态),失锁后激光器输出中的不稳定的调Q(QS)巨脉冲极有可能损坏后端级联的器件和设备从而造成损失。因此,对拥有自动锁模能力和失锁恢复能力的自动MLFL的需求与日俱增。
自动锁模通常指的是利用计算机中央处理器、单片机或者现场可编程逻辑门阵列(FPGA)等高速计算设备控制锁模谐振腔中的电控器件来代替人在锁模调节过程中的作用。它利用算法来自动识别激光器的脉冲状态,然后反馈控制谐振腔中的电控器件,从而能够自动锁定在目标状态。在过去的10年中,自动锁模在算法方面取得了重大突破,使得锁模时间、失锁恢复时间以及识别脉冲状态种类等方面都有了飞速进步。本文中,我们根据算法来分类,介绍了自动锁模技术的发展历程,并对各个成果的特点做了简要分析。
1 基于遍历算法的自动锁模技术
遍历算法因其简单性在早期已广泛应用于自动锁模,还因其能遍历所有偏振态,所以适合用来验证一些方案,同时也非常适用于观察偏振态与锁模状态之间的相互关系。近年来,基于遍历算法的自动锁模技术取得了很多不错的成果[5-12]。
2010年,T. HELLWIG等首次演示了自动锁模技术[5]。自动锁模技术的实验装置如图1(a)所示,他们在激光腔内加入基于压电挤压器的自动偏振控制器(APC),并使用自制的全光纤振幅分割偏振计来测量腔内偏振态,成功地表征了基于NPR的掺铒MLFL。其中,使用硅光电二极管来检测双光子吸收信号来判断锁模状态,因为只有超短脉冲的高峰值功率才会导致较强的双光子吸收(2PA)。通过计算机自动控制APC来进行偏振扫描,就可以对激光器进行表征,即在偏振态和激光器的系统参数(包括脉冲持续时间、中心波长和平均输出功率等)之间建立映射。庞加莱球上的自动偏振扫描结果如图1(b)所示,其中处于脉冲状态的偏振态区域具有较强的2PA信号值;但这里的脉冲状态还包含QS状态和混合状态(如QML状态)。如图1(c)所示,通过在扫描结果上应用数值滤波器,可以得到锁模状态对应的偏振态区域。该工作可以帮助基于NPR的MLFL快速找到锁模状态。但当已建立的映射长时间未更新时,它可能无法在短时间内找到锁模状态;因此,随时间变化的腔状态仍然是不能忽略的挑战。
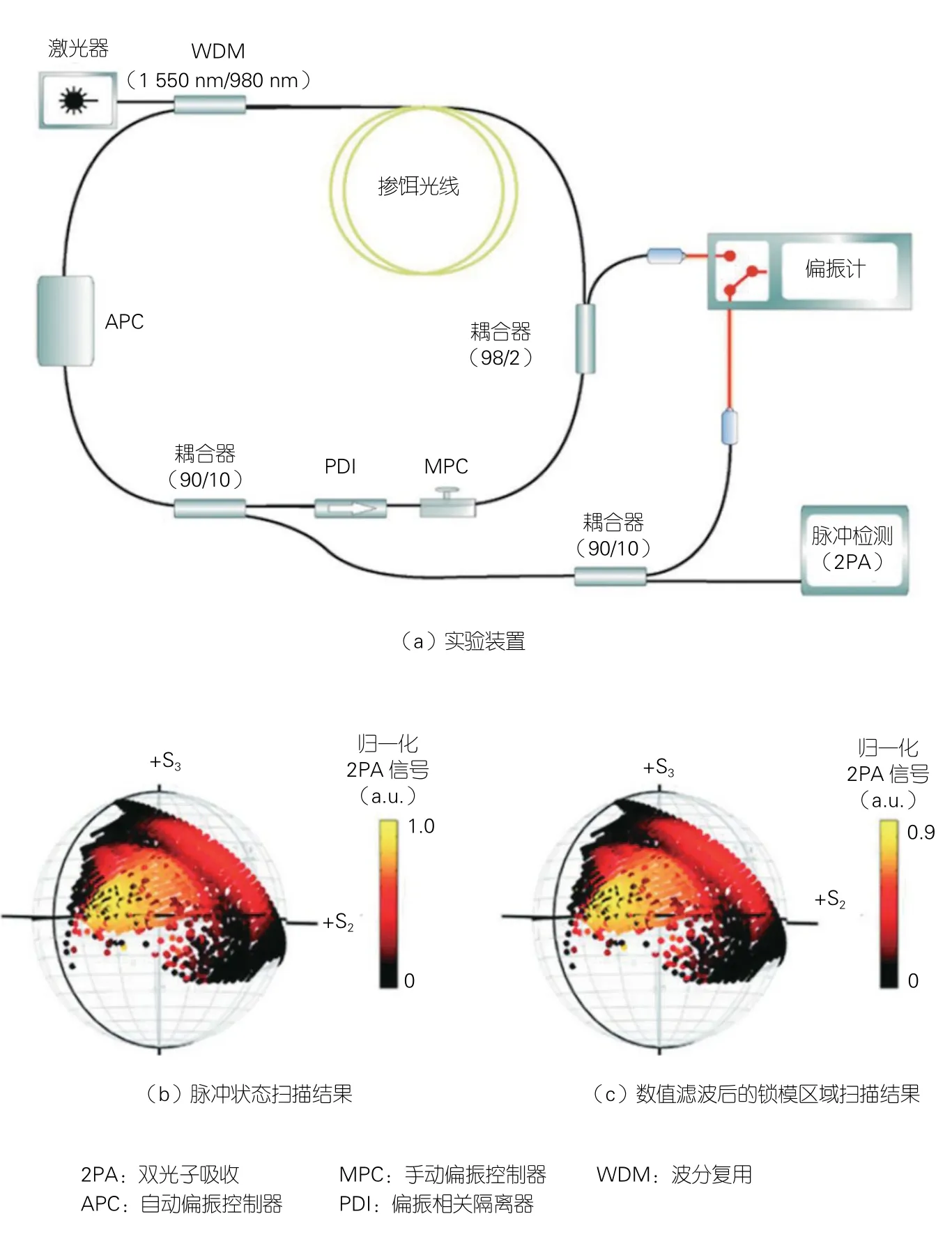
▲图1 基于非线性偏振旋转的锁模光纤激光器的自动化特征和校准实验成果
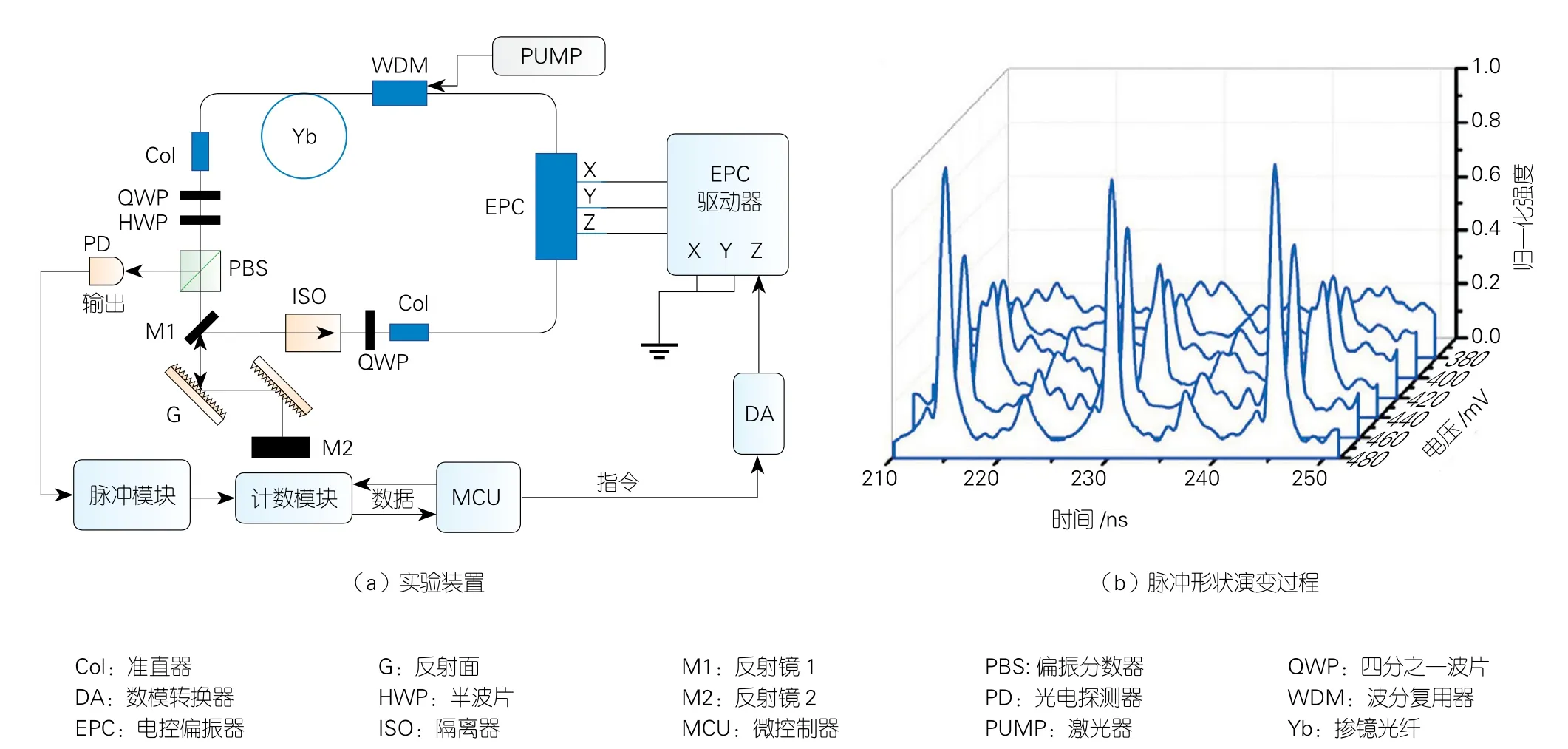
▲图2 基于非线性偏振旋转的掺Yb锁模自动控制实验成果[6]
2012年,华东师范大学的曾和平教授团队率先利用遍历算法和脉冲计数实现了基于NPR的掺Yb自动MLFL[6]。该实验装置如图2(a)所示,其中偏振分束器(PBS)作为输出耦合器将谐振腔中的部分光输出到腔外来进行检测,然后通过光电探测器(PD)变为电信号之后进入脉冲整形模块变成数字信号,接着再用一个高速计数模块进行脉冲计数并将计数的结果传递给微控制单元(MCU)。MCU根据计数的结果来判定当前是否为锁模状态,若不是,则遍历电控偏振控制器(EPC)的控制电压,直到找到锁模状态为止。这里使用的EPC是一个包含3个互为45°的集成光纤挤压器,但实验中为了方便起见仅使用了其中一个,这能够大大减少遍历算法的时间。由于单一控制电压实现的偏振状态有限,不能确保每次遍历都能找到锁模状态。为了实现高信噪比,实验中通过调节两个腔内衍射光栅之间的距离,将光纤激光器腔内的色散优化为接近零。图2(b)为基于此方案实现的自动MLFL从自由运行到锁模状态的时域波形演变过程。这项工作还研究了改变EPC的驱动电压时,激光器的脉冲宽度、光谱形状和载波包络相位偏移频率的变化过程。此外,在保持系统光路稳定的情况下,可以通过MCU来直接设置一个准确的电压值驱动EPC来复现锁模状态。该工作首次将反馈方案引入自动锁模领域,因此它无疑对自动锁模技术的发展产生了巨大的影响;但是,如果EPC电压遍历完后仍然没有找到锁模状态,这时候仍需通过腔内的波片进行手动偏振控制来改变腔内的初始偏振态,这就大大限制了该激光器的应用。
2014年,中国科学技术大学李莎等利用MSP430型单片机、两个电磁铁偏振控制器以及数模转换器(DAC)等器件实现了重复频率为6.238 MHz的自动MLFL[8]。实验装置如图3所示,工作原理与先前的工作类似,MCU运行遍历算法以搜索锁模状态,并且锁模状态的识别基于脉冲整形后的脉冲计数。基于此方案,激光器可以在90 s内自动进入锁模状态(即初始锁定时间)。该工作在初始锁模时间上取得了很大的进展,但在算法和硬件上仍然有很大的提升空间。工程应用中需要多种脉冲状态,而该激光器只能搜索FML,在对脉冲计数规则进行修订后可能能够搜索到HML状态;但是对于QS和QML状态则难以实现。
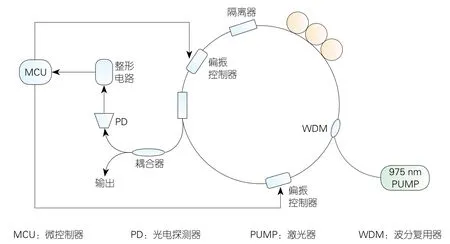
▲图3 被动锁模光纤激光器的自动锁模系统实验装置
▲图4 可编程、可快速切换的被动谐波锁模光纤激光器实验成果
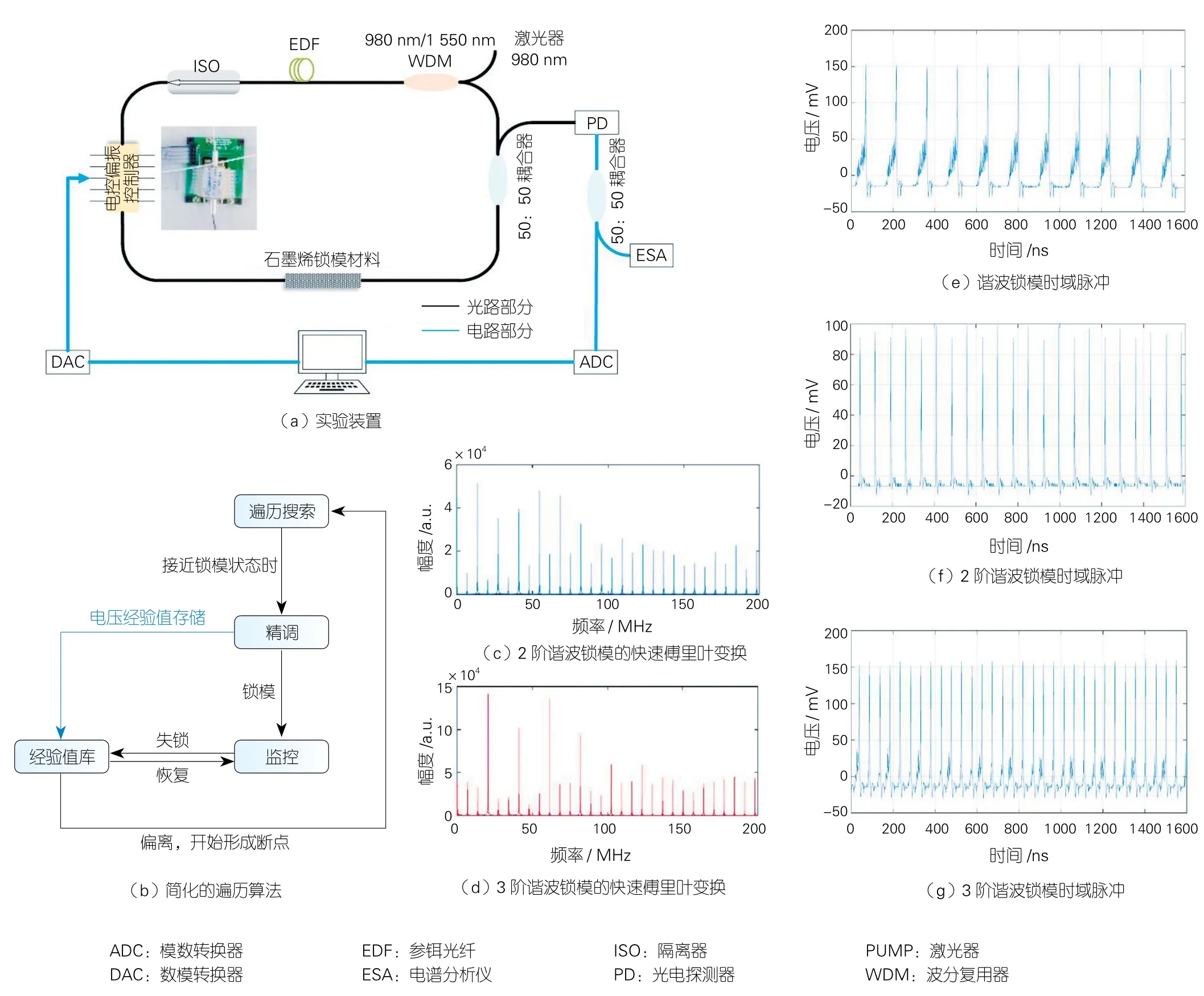
2018年,我们课题组实现了能够自动识别多种脉冲状态的自动MLFL,包括FML、2阶HML和3阶HML等状态[11]。通过记录经验值,激光器可以在这些脉冲状态之间迅速切换。实验设置如图4(a)所示,我们使用模数转换器(ADC)代替复杂的脉冲整形电路,从而简化了系统的反馈装置,并使用计算机作为控制中心。如图4(b)所示,我们提出了一种简化的遍历算法来搜索巨大的偏振空间(通过4个DC电压控制EPC从而形成4维参数空间)。在搜索过程中,我们建立了一个快捷库来记录各个脉冲状态的经验驱动电压值,从而迅速进行初始锁模、失锁恢复以及脉冲之间的切换。这里,FML状态的搜索仍然基于脉冲计数,而HML则是基于新的鉴别标准。通过对HML状态的时域脉冲进行快速傅里叶变换(FFT),我们发现对于n阶HML状态,第n个频谱分量的幅度在所有频谱线中最大,如图4(c)和图4(d)所示;因此,在脉冲计数的同时,将该频谱特征也作为鉴别标准是非常有效的。该工作实现的MLFL重复频率约为6.85 MHz,自动搜索到的各个脉冲波形如图4(e)—(g)所示。该工作中虽然是离线实现的自动锁模,但是提出的多状态鉴别算法是非常有效的。
2 基于机器学习算法的自动锁模技术
机器学习作为目前最热门的技术之一,也被应用于自动锁模领域[13-16]。这方面的研究主要是由华盛顿大学的J. N. KUTZ团队推动的。
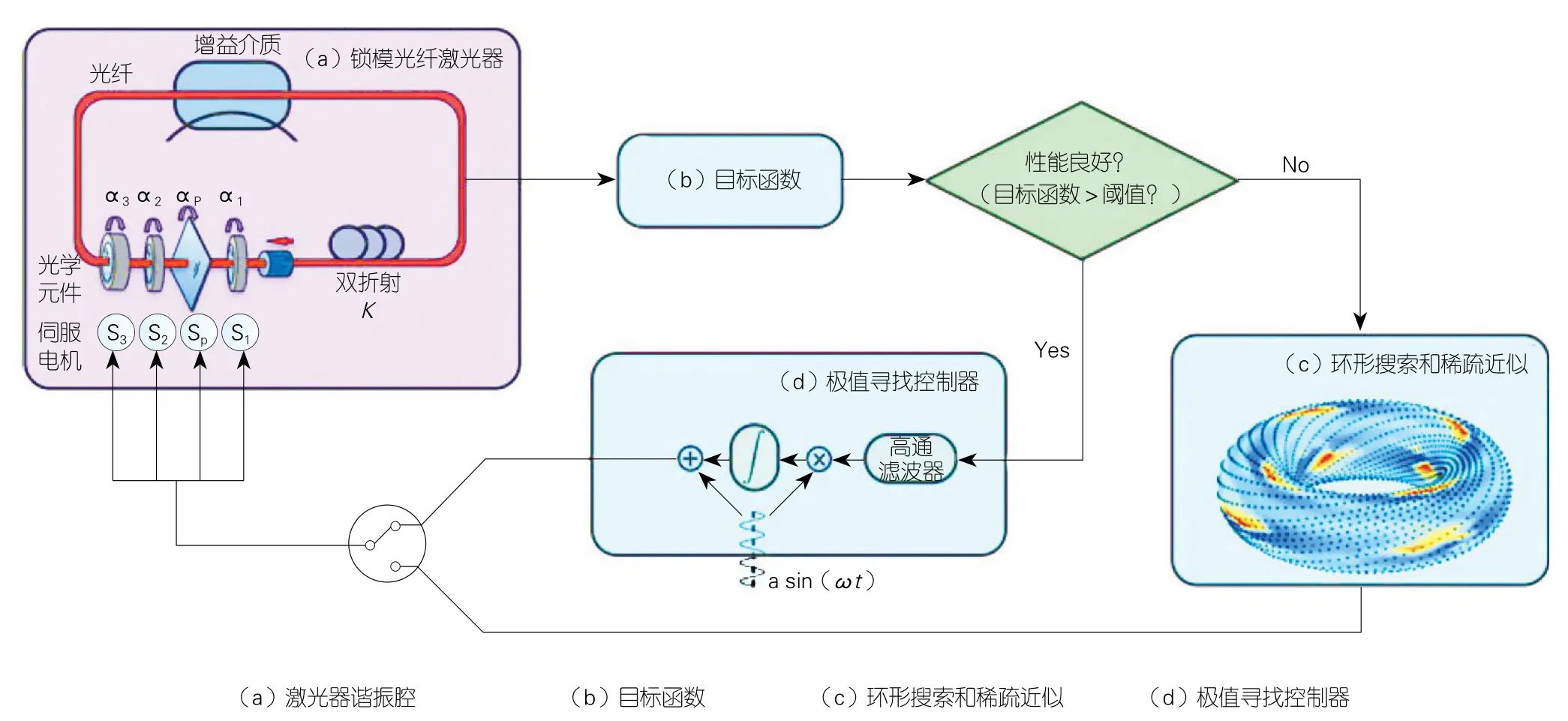
2013年,该团队演示了数值仿真,通过极值搜索控制(ESC)算法在基于NPR的MLFL数值模型中搜索并保持高能量FML状态[13]。ESC是一种自适应控制算法,它可以通过梯度探测找到并跟踪目标函数的局部最大值。然后,他们使用机器学习和稀疏表示法在数值仿真中成功地将MLFL中的双折射分类。2014年,他们结合ESC和基于机器学习的双折射分类,提出了基于数值仿真的自调谐光纤激光器,如图5所示[15]。在训练过程中,使用环形搜索、Gabor变换和奇异值分解(SVD)归约建立了一个库,该库包括各种腔体双折射值与波片和偏振器上的驱动电压的最优解之间的映射。在执行过程中,激光腔内当前的双折射用短环形搜索来表征,并用稀疏表示法来分类,然后由库给出最优解。ESC的作用是解决环境干扰带来的微小性能变化。如果环境干扰太大而导致应用优化方案后激光器依然不能回到期望状态,则该算法将返回并执行另一个短环形搜索来重新通过稀疏分类识别双折射。
最近,他们通过将深度学习结构与基于数值仿真的模型预测控制结合,发表了自调谐激光器的最新结果[16]。未来随着计算能力的发展,使用适当的机器学习算法来实现自动锁模可能会非常高效;但目前这些研究都还是基于数值仿真的。尽管仿真中有很好的理论指导数据生成,但在实际中能否发挥出好的效果还有待验证。
3 基于最优化算法的自动锁模技术
优化算法因能够高效地在短时间内找到锁模目标,成为目前自动锁模领域的研究最热点,取得了非常不错的研究成果[17-25]。
2013年,FU X.等使用基因算法(GA)来优化多个NPR滤波器,从而在理论仿真中增强了MLFL的单脉冲能量[17]。仿真表明,通过使用GA恰当地设置多个NPR滤波器,可以有效地增强单脉冲能量,从而可以规避和抑制多脉冲不稳定性。这也是GA首次被应用与自动锁模技术中。
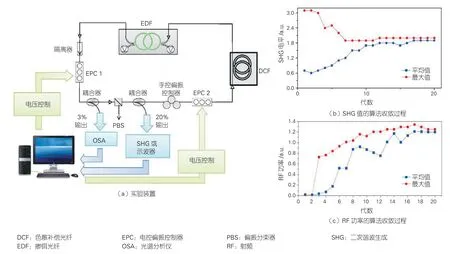
2015年,法国勃艮第大学的U.ANDRAL等首次利用演化算法(EA)来进行了自动锁模的实验演示[18]。实验装置如图6(a)所示,2个EPC和1个手调偏振控制器用于控制谐振腔内的偏振态。其中,每个EPC由3个电压驱动,而EA优化这6个电压值来实现自动锁模。首先,他们提出的适应度函数是非线性BaB2O4晶体中产生的二次谐波生成(SHG)信号。由于FML状态可以产生很强的SHG信号,所以持续优化EPC的6个驱动电压来放大SHG信号,最终可以达到锁模状态,如图6(b)所示。然而,将SHG信号的强度作为适应度函数无法很好地区分FML状态和QML状态。由于QML状态可能会出现在EA优化的过程中,为了解决这个问题,该工作中使用自由空间范围(FSR)射频(RF)频谱分量的强度作为新的适应度函数,来过滤掉QML状态,其算法收敛效果如图6(c)所示。随后,该组又使用新的适应度函数实现了自动锁定到FML状态和HML状态[19]。这些研究具有重要意义,但仍存在一些不足,如无法实现腔体内的整个偏振控制,这可能会使操作更加复杂。EA的复杂性和巨大的6维偏振搜索空间,导致初始锁模时间太长(EA收敛需要12代,大约为半小时)。
▲图5 自调谐光纤激光器实验成果
▲图6 基于演化算法的锁模光纤激光器实验成果
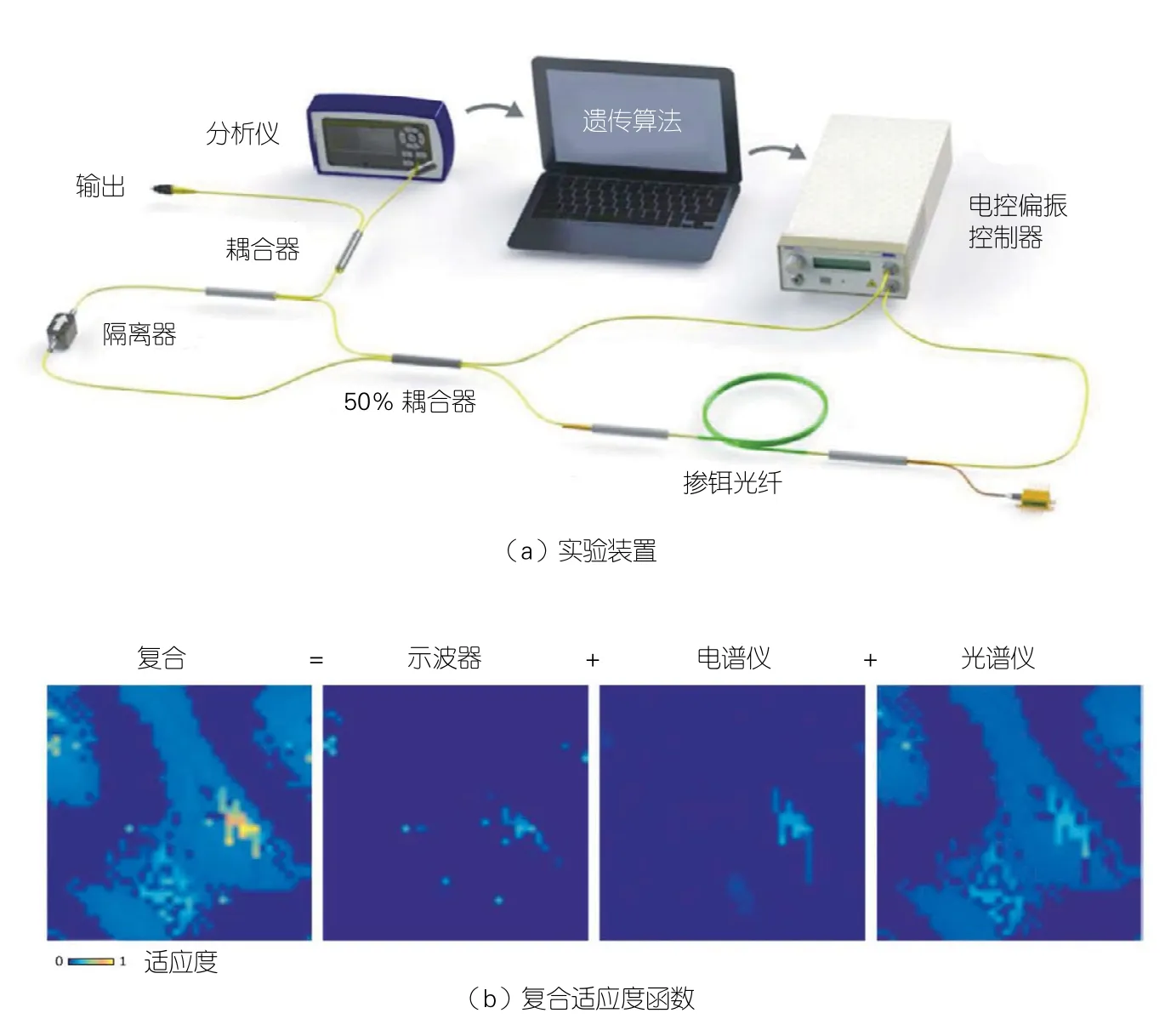
2016年,英国帝国理工学院R. I.WOODWARD等使用GA来优化EPC的驱动电压实现了自动锁模,其实验装置如图7(a)所示[20]。该工作创造性地提出了复合适应度函数,它是从时域波形、光谱和频谱中提取的3个分量的平均加权总和。通过扫描EPC的驱动电压,得到了它们之间的关系,如图7(b)所示。该工作验证了GA在优化复合适应度上是非常有效的,且4次连续FML状态搜索结果显示了该激光器良好的可重复性。此外,由于激光器在GA迭代的过程中受到干扰后依然能恢复到FML状态,所以该自动MLFL还具有抗环境干扰的能力。该工作进一步为在自动锁模技术中使用GA铺平了道路,但复合适应度函数的参数需要使用示波器、光谱分析仪和电谱分析仪等大型设备来收集;因此,激光器的成本和便携性是面临的主要问题。此外,由于使用大型设备进行的数据采集时设备之间的数据交互很耗时,而且该工作中使用的GA的复杂性,初始锁模时间约为30 min。
▲图7 基于基因算法的超短脉冲自优化实验成果[20]
2017年,美国科罗拉多大学的D.G. WINTERS等利用GA实现了全正常色散光纤激光器的自动锁模,同时利用爬山算法进行失锁恢复[22]。实验装置如图8所示,他们使用4个液晶(LC)相位延迟片来代替传统基于NPR的MLFL中的可旋转的固定延迟片,LC只需要较低的电压进行驱动;因此,偏振的参数空间是4维的。GA的适应度函数是测得的光谱和目标光谱之间的确定系数,它揭示了这两个光谱之间的光谱相似性。基于有效的适应度函数可以迅速找到锁模状态,同时该工作使用爬山算法来进行失锁恢复。通过这些处理,输出脉宽的稳定性大大提升。该工作最终通过GA在人口数量为50时运行9代后能够成功找到FML状态,大约耗时90 s。并且基于爬山算法,激光器可以在30 s内从失锁成功恢复。
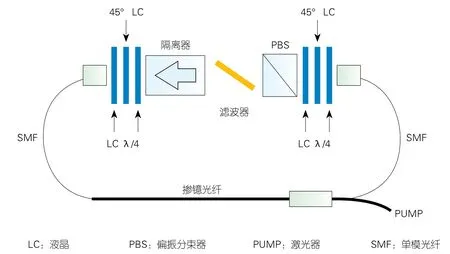
▲图8 全正常色散自动锁模光纤激光器实验装置[22]
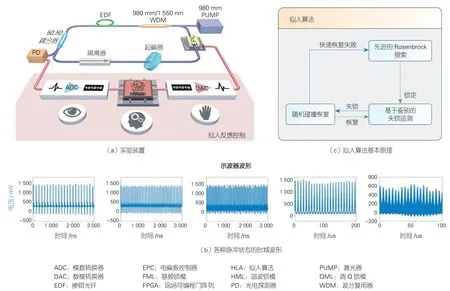
▲图9 基于拟人算法的智能锁模光纤激光器实验成果[24]
2019年,我们实现了第一个实时智能可编程MLFL,实验装置如图9(a)所示[24]。该激光器能够自动锁定各种脉冲状态,包括FML状态、2阶HML状态、3阶HML状态、QS状态和QML状态,如图9(b)所示。此外,该激光器大大地缩短了FML状态的初始锁模时间和失锁恢复时间,其中最短的启动仅为0.22 s,而最短的恢复时间仅为14.8 ms。通过10次连续实验,我们得到平均初始锁模时间为3.1 s,平均失锁恢复时间为58.9 ms。此外,我们在开放的实验环境中进行了15天的运行测试,验证了激光器优秀的稳定性。这些优秀的性能主要归因于我们的实时偏振控制硬件平台和所提出的拟人算法(HLM)。激光器最初在约0.5 s内达到FML状态,然后在15天内发生了12次失锁,平均恢复时间仅为31 ms,这也表明激光器优秀的稳定性。这些优秀的性能仍归因于我们的实时偏振控制硬件平台和所提出的HLM。如图9(a)所示,硬件平台由ADC、FPGA、DAC和EPC组成。与离线实现(大型设备用于数据采集,而PC作为计算中心)相比,实时实现在耗时上有明显的优势。如图9(c)所示,HLM主要由3部分组成:先进的Rosenbrock搜索(ARS)算法、随机碰撞恢复算法以及锁模鉴别算法。HLM从ARS开始,被用来搜索目标脉冲状态。在锁定到目标脉冲状态后,HLM将进入基于鉴别的监测中(除非检测到失锁)。随机碰撞恢复试图能够高效地将激光从失锁中恢复。如果恢复成功,则HLM将返回监测过程,否则重新启动ARS。该算法称为拟人算法是因为它有许多和手动锁模过程中人的逻辑相似的功能,而ARS在某种程度上类似于偏振调整中的人为行为。此外,我们提出了一套有效的目标函数和鉴别标准,可以实现各种脉冲状态的自动搜索。通过将实时实现与拟人算法相结合,我们成功解决了自动锁模领域中的一些持久性缺陷问题,包括耗时长以及由于使用大型设备而导致的便携性不足、高成本等问题。此外,可编程的各种模式输出提高了激光器的灵活性,使其在研究和工业应用中都具有广阔的前景。随后的工作中,我们基于FPGA控制平台改进了GA算法,提出了基于FFT特征的新的适应度函数,进一步缩短了锁模时间[25]。
为了提高自动MLFL的智能水平,应该监测和控制更多的反馈信号。除了时域波形和频谱外,还可以通过将光谱信息加入到反馈信号中来进行一定程度的光谱控制[20-22]。目前使用光谱分析仪来进行光谱信息采集的方法速度比较慢,无法实现实时自动锁模。最近,我们课题组将时间拉伸技术引入到实时智能MLFL,实现了锁模飞秒脉冲的实时智能控制,实验装置如图10(a)所示[26]。时间拉伸技术通过色散介质将光谱映射成为时域波形,使得我们可以实时采集和分析光谱信息。结合智能控制算法,实现了锁模光谱宽度10~40 nm可调,调节精度为1.47 nm,如图10(b)所示,并且实现了光谱形状可编程为双曲正割或三角形,如图10(c)所示。此外,基于实时的光谱控制,我们的研究还展示了从窄谱锁模态到宽谱锁模态以及从三角形光谱脉冲态到宽谱锁模态的演变过程,发现两者动力学过程具有相似性,提出了目标锁模状态可能决定中间动力学过程的猜想,为人们进一步探索MLFL内部机理提供新视角。
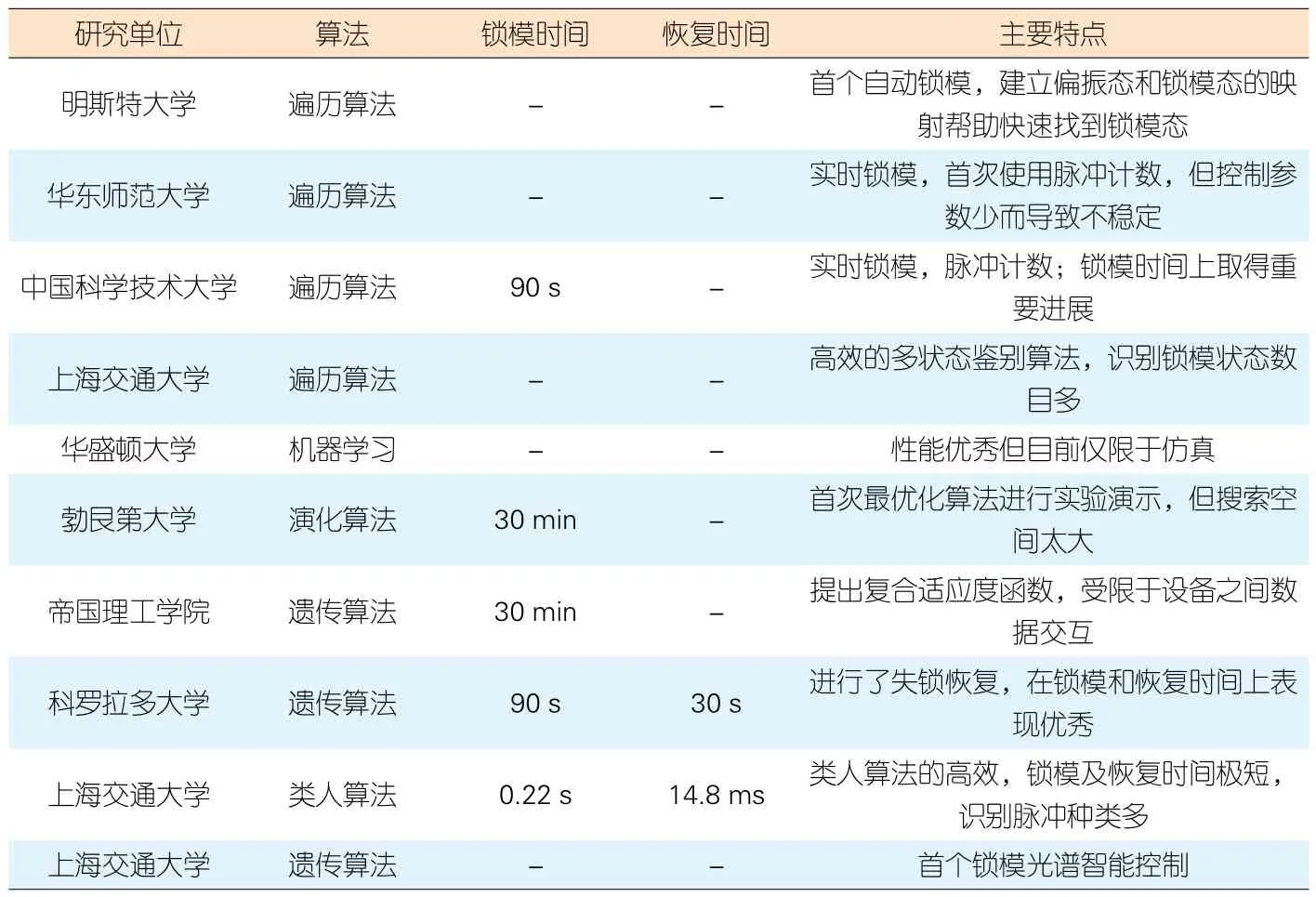
表1 自动锁模激光器工作的比较
表1从算法、锁模时间、恢复时间以及主要特点等方面总结了上述自动锁模相关研究的成果。遍历算法因其简单性作为早期自动锁模的探索性工作,机器学习因其出色的模型优化能力在自动锁模的仿真中表现出色;而最优化算法因其高效性能够大大降低锁模时间,但其中目标函数的选择也是算法性能的关键。
4 结束语

▲图10 基于时间拉伸技术的锁模飞秒脉冲智能控制的实验成果[26]
自动锁模技术解决了传统基于NPR的MLFL中的手动偏振调节耗时长和不稳定等难题,在锁模时间、失锁恢复时间以及识别脉冲状态数目等方面都取得了非常好的研究进展。这些成果在学术界和工业界都有极大的应用潜力,未来还可以通过升级硬件和优化算法来进一步提升这些指标。但是自动锁模未来的发展不仅仅局限于此,结合时间拉伸色散傅里叶变换来实时控制锁模脉冲光谱就是一个重要的研究趋势而且已经取得了突破性的进展[26]。目前,采用智能锁模技术可实现对飞秒激光器输出脉冲光谱形状的智能调控;但调控参数仅限于偏振态,对光谱的调控能力有限。未来可以进一步将泵浦功率和锁模谐振腔长度引入反馈控制信号。同时,由于实时光谱分辨率有限,还无法实现某些特殊形状的锁模光谱。此外,目前尚未实现飞秒脉冲时域相位以及脉冲宽度的实时精确识别,在飞秒脉冲时域精确调控方面还需加大研究力度。而通过飞秒脉冲的空间相位控制实现飞秒脉冲光场的空域精确调控还是研究空白;因此,时频空多维度精细调控飞秒超快激光是未来的重要发展趋势。
猜你喜欢
振动与冲击(2022年19期)2022-10-17
制造业自动化(2022年9期)2022-10-03
聊城大学学报(自然科学版)(2022年4期)2022-08-22
科学导报(2022年36期)2022-06-24
成都信息工程大学学报(2022年2期)2022-06-14
国际太空(2022年1期)2022-03-09
晚晴(2016年11期)2016-12-20
哈尔滨理工大学学报(2014年3期)2015-01-04
微型计算机·Geek(2009年3期)2009-12-11