
基于模糊?RBF?神经网络的轨道交通站台门预热控制技术研究
2020-07-04 02:47周超李樊杜呈欣
现代城市轨道交通 2020年6期
周超 李樊 杜呈欣


摘 要:在严寒地区,恶劣的环境会对轨道交通站台门系统的使用产生不良影响,因此需采用预热控制系统保障设备的稳定运行。针对站台门预热控制系统难以使用精确的数学模型建模,系统控制参数设定困难,导致预热效果不稳定、安全性和可靠性降低的问题,文章将传统 PID(比例-积分-微分)控制、模糊控制和 RBF神经网络 3 种算法相融合,构建出一种智能、高效的控制算法;并通过仿真及试验证明该算法可以实现预热控制参数自动、快速迭代优化,具有较好的温度控制效果,可改良传统 PID 控制算法的动态控制性能及对非线性对象的控制稳定性,有一定的实际应用参考价值。
关键词:轨道交通;站台门系统;预热控制;模糊控制;RBF 神经网络
中图分类号:TP273
1 研究背景
站台门系统是重要的轨道交通安全防护设备。在严寒工况下,站台门系统会出现门机结构低温特性变化、静态阻力矩突变等问题,进而产生故障,影响列车进出站及其与信号系统的车地联动功能,导致列车降级运行,甚至停运。因此,必须为严寒工况下的站台门系统安装辅助加热系统,即站台门预热控制系统。但由于站台门系统结构复杂,空间不规则,具有非线性和非封闭性的特点,利用常规理论无法对其进行准确的数学建模,所以传统的控制策略在实际应用中往往达不到预期效果,会对轨道交通的正常运营造成一定的安全风险。
而神经网络可以用于控制复杂系统,具有较高的实时性。其中,径向基(RBF)神经网络是一种具有优良特性的前馈型神经网络,在泛化能力和学习速率方面具有突出优势;模糊控制可有效控制非线性、模糊性强、难以建模的被控对象,但存在推理计算较慢,精度较低的问题。将这2种算法相结合,构建模糊RBF神经网络,可使控制系统同时具备2种控制策略的优点,不仅可对非线性模型进行模糊处理分析,同时也具备较强的全局逼近能力和逼近精度。此方法可解决一般神经网络算法下存在局部最优解的问题,并具有网络拓扑结构清晰、参数可分离学习、控制收敛快的特点。本文将此方法应用于预热控制系统中,实现了控制参数自动快速迭代调整至最优,从而提高了站台门预热控制系统的控制效果和控制稳定性。
2 预热控制系统总体设计
站台门预热控制系统由温度传感器、温度巡检模块、加热设备(加热带)和控制柜(含可编程逻辑控制器PLC)组成。温度传感器和温度巡检模块分别对站台门内壁温度及其工作环境温度进行实时采集;控制器根据智能控制策略对加热带工作时间进行控制,当站台门的工作温度可长时间保持在适宜范围内时,完成对站台门的预热工作;远程监视主机采用Modbus现场总线实现对系统的远程监控功能。预热控制系统电气架构示意图如图 1所示。
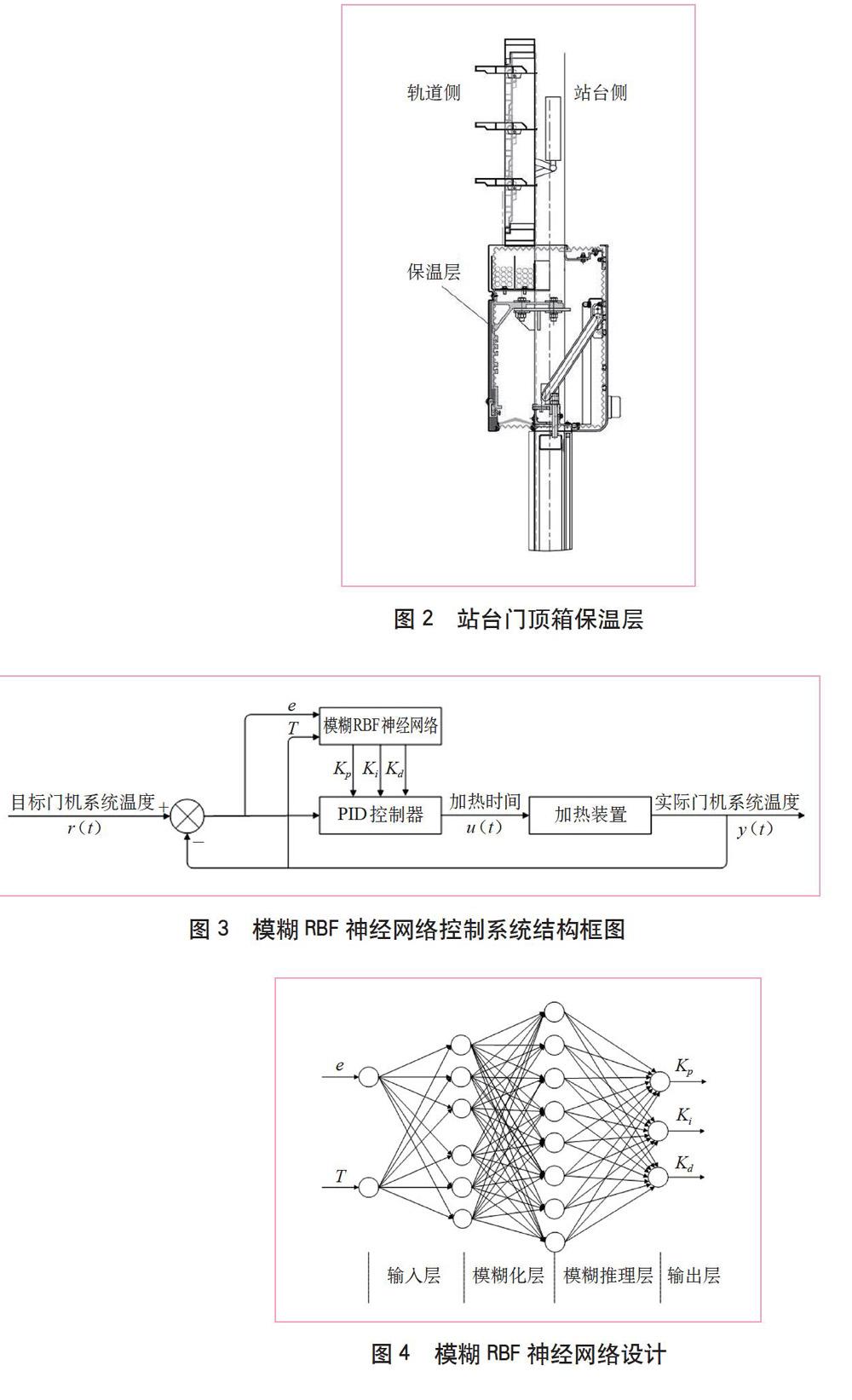
在站台门顶箱的轨道侧增加由保温材料制成的保温层,以减少站台门顶箱内部的热量流失,从而延长顶箱内侧的保温时间,降低能源消耗。站台门顶箱保温层如图2所示。
该预热控制系统方案在温度传感器、温度巡检模块失效,且远程监视主机没有监测出设备故障时,可能存在低温时系统未启动加热、温度足够高时系统未停止加热的情况。若加热带在低温时未自动启动,可能导致站台门系统在短时间内无法正常工作,此时可由站台工作人员手动开启加热带,并及时更换失效的温度传感器;若加热带在温度足够高时未停止加热,考虑到其最高加热温度为100 ℃(由加热带本身性能决定),低于站台门系统可承受的最高温度,不会对系统产生安全影响,因此该系统总体设计安全。
3 模糊 RBF 神经网络控制系统设计
模糊RBF神经网络控制系统将设定的目标门机系统温度r(t)与实际门机系统温度y(t)之间的偏差(即温度控制偏差)e和实际门机系统温度T作为模糊RBF神经网络算法的输入项,通过该算法快速地动态调整PID控制器参数,调节加热时间u(t),实现对目标门机系统温度的快速跟踪,其结构框图如图 3所示。
3.1 模糊 RBF 神经网络设计
根据上述控制系统结构框图,构建具有4层网络拓扑结构的模糊RBF神经网络,如图4所示。输入层由2 个输入节点组成,分别是实际门机系统温度T和温度控制偏差e;模糊化层包括6个节点,可实现将输入参数模糊化的功能,此层使用高斯函数计算;模糊推理层包括8个节点,可实现PID参数的自动整定;输出层包括Kp、Ki、Kd 3个节点参数,并实时输出至控制器。对下面各层的描述中,fn(X)是各层的输出变换函数,n为层数。
3.1.1 输入层
输入层的2个节点分别连接输入变量,即实际门机系统温度X1 = T和温度控制偏差X2 = e,设定该层的函数为:
4.2 结果分析
为验证模糊RBF神经网络的控制性能,在仿真软件Matlab中建立传统PID控制算法和模糊RBF神经网络控制算法下的仿真模型。在仿真过程中,将模糊RBF神经网络PID控制算法中所搭建模型的2个输入变量——实际门机系统温度T和温度控制偏差e分别取6 个和8个模糊子集,RBF网络学习因子η取 0.3,动量因子α取0.03,初始值自由设定。通过Matlab对2 种控制算法下的系统阶跃输入响应进行仿真,得到的结果如图5所示。
由图5计算可知,传统PID控制算法输出的最大超调量为58%,上升时间为3.1s,调节时间为17s;模糊RBF神经网络控制输出的最大超调量为20%,上升时间为2.9s,调节时间为5.1s;可见与传统PID控制算法相比,模糊RBF神经网络具有更好的动态性能和稳定性,在响应速度、衰减比、调节时间等方面均有优势,可有效、快速、稳定地对站台门门机系统温度进行控制。
5 结语
本文以站台门系统作为典型轨道交通装备的预热对象提出了一种利用RBF神经网络参数自动迭代更新的模糊控制系统,该系统融合了人工神经网络、模糊控制的优点,可用于时变、难以建模的控制系统。通过在Matlab软件中建立数学模型并仿真,结果表明模糊RBF神经网络控制方法较传统PID控制方法具有更佳的动态性能和稳定性,可实现控制参数的实时优化和迭代更新,有效提升轨道交通站台门预热控制系统的可靠性和抗干扰性。
参考文献
[1]邓保顺. 北方地区屏蔽门系统地铁初期冬季热环境分析[J]. 铁道工程学报,2018,35(12):86-91.
[2]W. He, Y. Chen, Z. Yin. Adaptive neural network control of an uncertain robot with full-state constraints[J]. IEEE Transactions on Cybernetics,2017,46(3):620-629.
[3]崔红芬,杨波,蒋叶,等. 基于模糊控制和SOC自恢复储能参与二次调频控制策略[J]. 电力系统保护与控制,2019(22):89-97.
[4]司景萍,马继昌,牛家骅,等. 基于模糊神经网络的智能故障诊断专家系统[J]. 振动与冲击,2017,36(4):164-171.
[5]杨莉,袁信. 基于模糊神经网络的惯性导航系统预热控制[J]. 中国惯性技术学报,2000(3):24-27.
[6]王婕,袁宁宁. 基于RBF神經网络PID控制的水压加载系统研究[J]. 仪表技术,2013(3):32-34.
[7]程家根,祁正华,陈天赋. 基于RBF神经网络的网络安全态势感知[J]. 南京邮电大学学报(自然科学版),2019,39(4):88-95.
[8]谭铁仁,关振宇,张君鹏. 地铁屏蔽门的常见故障[J]. 现代城市轨道交通,2013(1):28-31.
[9]徐晓光,孟浩,苏朝龙,等. 低温加热釜系统设计与实验研究[J]. 低温与超导,2016(3):60-64.
[10] 王奉鹏. 铁路货运装备新型外包保温加热系统综合性能研究[J]. 包装工程,2019(13):184-190.
收稿日期 2020-02-19
责任编辑 苏靖棋
猜你喜欢
中国应急管理科学(2022年2期)2022-05-23
中国教育信息化·高教职教(2022年4期)2022-05-13
计算技术与自动化(2022年1期)2022-04-15
电子乐园·中旬刊(2021年6期)2021-05-16
科学家(2021年24期)2021-04-25
华东师范大学学报(自然科学版)(2019年5期)2019-11-11
智富时代(2018年5期)2018-07-18
智富时代(2018年5期)2018-07-18
中国测试(2018年9期)2018-05-14
现代职业教育·中职中专(2018年7期)2018-05-14
