
基于图像分割算法的超高速碎片云的分析研究
2020-07-04 02:27王晓宋燕
智能计算机与应用 2020年3期
王晓 宋燕

摘要:目前针对超高速碎片云的研究大多是采用SPH数字模拟方法,用离散点表示碎片云,但这种方法难以对单个碎片进行识别。少数研究通过闪光X成像技术获得了撞击过程中的碎片云序列,对碎片云进行了动态图像诊断和定性分析。但是X 射线照片分辨率较低,对比度较低,无法对碎片云进行定量分析获取其精确参数。采用超高速序列激光阴影成像设备获得2组对比度较高,分辨率达500万像素的碎片云图像,并通过多种图像分割方法将碎片云与背景分离同时将粘连的碎片分割开,然后在ROI区域(region of interest, ROI)内采用基于Hu不变矩的轮廓识别方法对相邻帧的碎片进行识别,从而对碎片云进行了定量分析,获得了碎片的轴向运动速度,并得到了碎片运动轨迹。实验结果表明基于简单线性迭代聚类(simple linear iterative clustering, slic)超像素分割算法适用于碎片云图像的分割且分割后的碎片识别度较高;碎片的轴向速度从碎片云的后端到前端逐渐增大,且位于前端的碎片速度最大;碎片云对后板中心附近区域造成的损伤严重。该方法为碎片云图像的研究奠定了基础,对超高速碎片云的特性研究具有重要意义。
关键词: 超高速; 碎片云; 图像分割
【Abstract】 Majority of researches on hypervelocity debris cloud are digital simulations based on Smoothed Particle Hydrodynamics (SPH) method. Debris cloud is simulated by some discrete particles. But it is difficult to identify each debris individually. Some of results make a diagnosis of dynamic images of debris cloud and conduct qualitative analysis by using X-ray image of debris cloud. However, it is impossible to acquire the precise parameters of debris cloud. In this paper, two sets of debris cloud images with high resolution and high contrast are obtained by employing the Hypervelocity sequence Laser Shadowgraph Imager. To get obvious contour characteristics of debris cloud image and separate the debris from the background as well as the adhering debris, multiple image segmentation algorithms are applied. Then an image feature recognition algorithm based on Hu moment invariants in the region of interest location(ROI) is conducted and the qualitative analysis of dynamic debris is achieved. Finally, the axial velocity of debris is calculated and the trajectory of debris is simulated. It is demonstrated that the recognition rate of debris is the highest by combining with the simple linear iterative clustering super-pixel segmentation algorithm and the velocity of debris from the rear of debris cloud to the front side of debris cloud is increasing. The velocity of debris in the front side is the most fast one. According to the trajectory of debris, the area around the center of the rear wall suffers a severe damage. In conclusion, this method is of great significance to study on the characteristics of hypervelocity debris cloud.
【Key words】 hypervelocity; debris cloud; image segmentation
0 引 言
隨着人类对太空探索脚步的加快,空间碎片环境近年来急剧恶化,各国对航天器特别是载人航天器和空间实验室碎片防护结构设计[1-2],以及空间碎片云的研究愈加重视。由于超高速碰撞发生在空间,要真实地获取碎片云参数极其困难,因此地面模拟试验便成为获取碎片云参数的主要途径,即应用二级轻气炮加载技术进行弹丸超高速正撞击薄板实验研究。
目前主要的超高速碎片研究大多都是传统的物理方法,其中应用最为广泛的是SPH方法[3-5],采用规则的粒子来模拟碎片云的形成过程,而实际工程中超高速碰撞涉及大形变其运动是不规则的,因此模拟数值与实验中的真实数据有一定差距,同时SPH方法的求解计算量巨大,不仅耗费资源严重还十分耗时。然而大部分碎片云图像研究是利用闪光 X 射线照相设备获取碎片云图像,对碎片云的形状变化进行了定性分析,借助不同时刻拍摄的 X 射线照片对碎片云上某一点的速度进行测量,通过同一点在不同时刻所处位置的间距与拍摄时间之差的比值来获得该点的速度[6]。由于X 射线照片分辨率较低,对比度较低,且碎片云的运动是不规则的。故碎片云、背景以及噪声难以区分,难以获取碎片云的精确参数。此外,Watson等人[7]提出了一种测量碎片速度和尺寸的方法,针对碎片云视频帧序列建立二维空间和时间的三维坐标系,将同一条直线上的点视为同一碎片,并采用了随机一致算法进行了数据的筛选,由此得到碎片的运动轨迹和速度,这样匹配得到的碎片具有一定的随机性,未结合碎片的特征进行识别,误差较大。
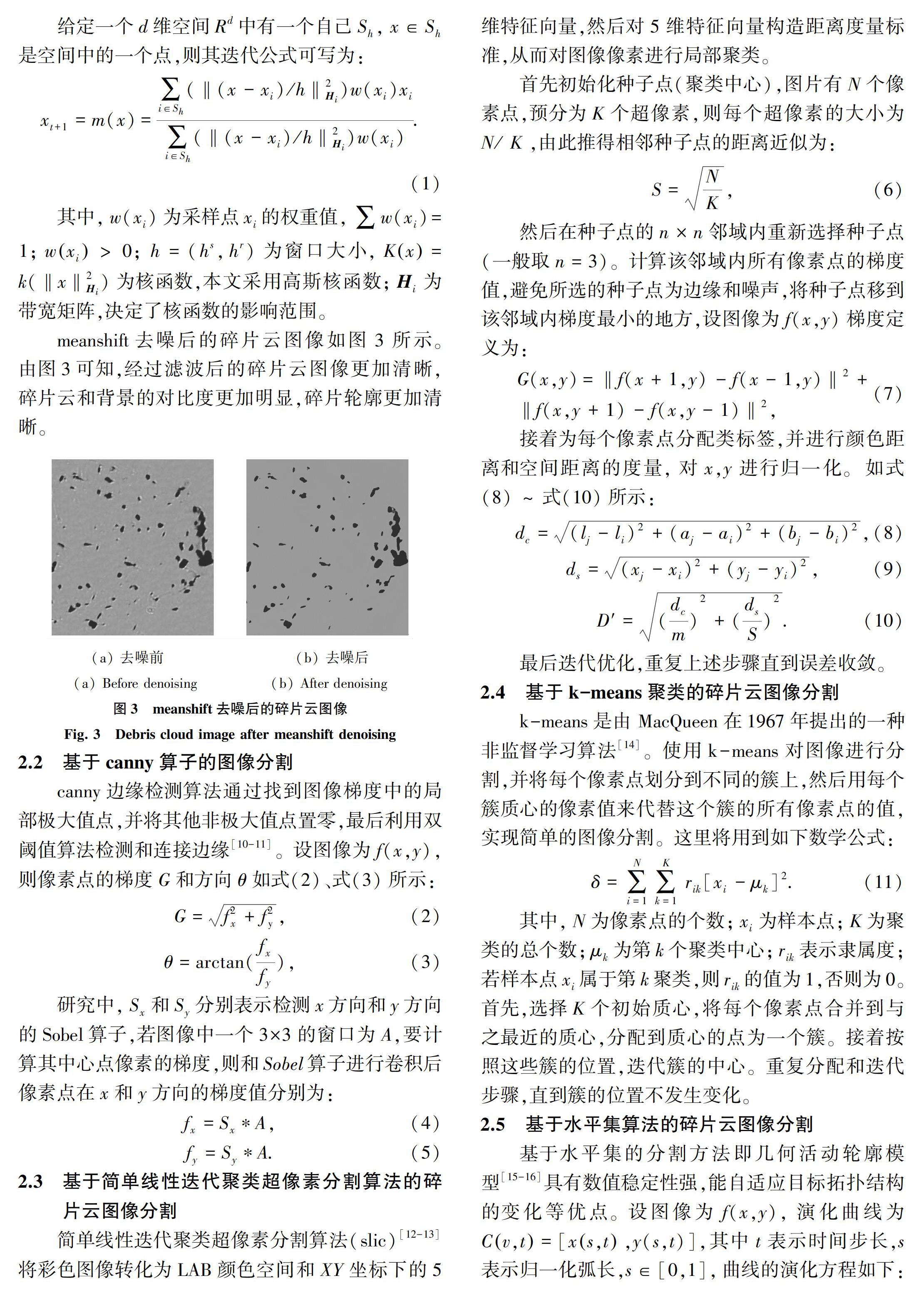
随着人工智能的兴起,图像处理和模式识别已经应用在很多领域并取得了不错的成果,如医学图像分析、光学文字识别以及目标追踪等。本文基于均值漂移、边缘检测、超像素分割、k-means聚类分割、水平集分割方法和基于矩的特征匹配方法对碎片云的特性展开研究。采用中国空气动力研究与发展中心的超高速序列激光阴影成像设备获得了2组对比度较高,分辨率达五百万像素的碎片云图像,首先利用均值漂移滤波对原始的碎片云图像进行了平滑处理,去除了噪声等干扰信息;然后通过多种图像分割方法将碎片云和背景分离并将粘连的碎片分割开,得到轮廓清晰特征明显的碎片云图像;接着在ROI区域内采用基于Hu不变矩的匹配算法对每个碎片轮廓特征进行识别,最后对碎片质心移动的位置进行定量分析得到碎片的轴向速度,同时得到了碎片的运动轨迹。实验结果显示基于简单线性迭代聚类超像素分割算法的适合于碎片云图像的分割,不仅能将前端大部分粘连重叠的碎片轮廓提取出来还能保留细小碎片的轮廓特征,同时碎片识别数量较高;多组实验对比发现碎片的轴向速度越靠近碎片云的前端,速度越大;大部分碎片最后撞击的位置集中在后板的中心位置附近,并对后板中心附近区域造成严重损伤。
1 实验及相关数据
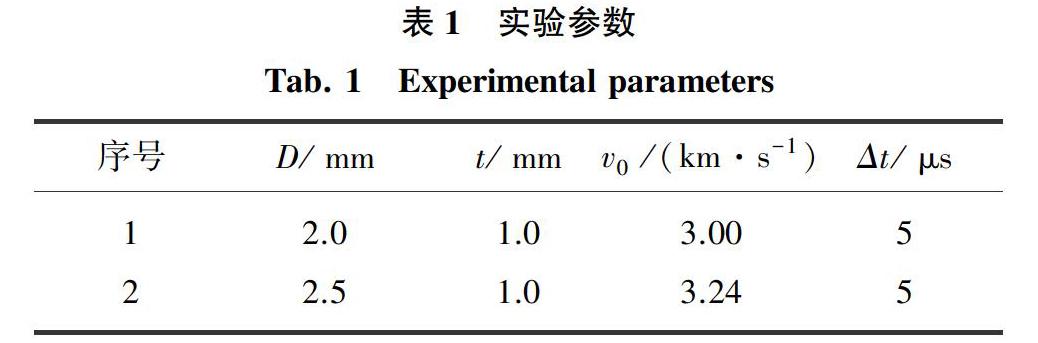
本文采用二级轻气炮发射球形弹丸进行超高速撞击试验,获得了2组碎片云图像,每组各八帧图像,图像分辨率为2 400×2 400,弹丸材料为2017-T4铝合金,靶板材料采用6061-T6 单层铝合金板。2组实验数据见表1。
4 实验结果与分析
碎片成功匹配数量见表3。由表3可知slic分割算法得到的图像进行轮廓特征匹配后成功识别的碎片的数量最多。[JP2]分割得到的图像在基于hu矩的轮廓特征中识别效果优于其他三种分割方法,尤其是对于位于碎片云前端的碎片识别率更高,因此4种分割算法中,slic算法更适用于碎片云图像的分割。
对基于slic超像素算法分割的结果进行匹配得到的碎片的轴向速度进行了求解,求解结果见表4,表5,每个碎片有属于自己的编号和对应速度。
碎片云轴向最大速度即前端速度是评价航天器内部仪器设备毁伤程度的重要因素,仪器设备的外壳能否被击穿以及击穿面积大小都与碎片云的前端速度密切相关。结合表4、图8以及表5和图9分析得知,位于碎片云前端的碎片轴向速度较快,位于碎片云后端的碎片速度较慢,从碎片云后端到碎片云前端碎片速度逐渐增大。分析图8和图9可知,位于碎片云后端的框内的碎片速度大多小于1 km/s,位于碎片云中部的框内的碎片速度大多介于1 km/s与2 km/s之间,位于碎片云前端的框内碎片速度约为2 km/s。观察表4知道,碎片编号为31、41、42的碎片的速度约为2 km/s且碎片的位置也靠近碎片云的前端。在表5中,碎片编号为22、51、64、77的碎片速度约为2.2 km/s且碎片的位置也靠近碎片云的前端。同时,由于实验1中弹丸的直径小于实验2中弹丸的直径,故撞击形成的碎片也相对较少,从而实验2匹配得到的碎片数量多于实验1匹配的碎片数量。
根据匹配得到的连续帧的碎片质心坐标,在二维空间XY坐标下获得了碎片的运动轨迹,如图10所示。大部分碎片最后撞击的位置集中在后板的中心位置附近如图中黑色圆点所示,因此后板中心附近为损伤最为严重的区域。
5 结束语
本文利用图像处理的方法对碎片云的特性進行了深入研究。通过对实验获得的连续帧碎片云图像进行图像处理,对碎片云的特性进行了定量分析,采用4种不同的分割算法对碎片云图像进行分割,对比了4种分割算法的有效性,同时在相邻帧碎片云图像中对同一碎片进行识别匹配,进而得到了碎片的运动轨迹。通过分析可以得出以下结论:
(1)基于简单线性迭代聚类超像素分割算法得到的碎片云图像分割效果更好,不仅能将粘连的碎片分割开而且能保留许多细小的碎片,还能更好地处理碎片云前端的碎片从而得到位于碎片云前端的碎片轴向速度、即碎片云最大轴向速度,同时在进行碎片匹配时,正确匹配的碎片数量更多。
(2)位于碎片云后端的碎片轴向速度较慢,位于碎片云前端的碎片轴向速度较快,从碎片云后端到碎片云前端碎片速度逐渐增大。
(3)根据碎片运动轨迹可知大部分碎片最后集中在后板中心附近的位置,并对后板造成严重损伤。
实验结果表明运用图像处理的方法对碎片云图像进行研究,可实现对碎片云中单个碎片的识别,从而获得单个碎片的深度信息如轴向速度,运动轨迹。在碎片云的膨胀过程中,由于部分碎片会发生翻转,拍摄获得的碎片云图像中同一碎片形态会有所差异,对于这部分碎片的识别仍有一定难度,对于碎片云特性的研究仍然需要进一步的探索。在接下来的研究中,主要从碎片图像的获取方法和图像处理算法两个方面进行改进。为了提高碎片识别的精度,需要从不同角度获得更多高质量碎片云图像,进而提取碎片云的更多信息。另一方面,结合获得的碎片特征信息采用更可靠的匹配算法对碎片进行识别,从而对碎片云的特性进行进一步的研究。
参考文献
[1] LIOU J C, JOHNSON N L. Planetary science: Risks in space from orbiting debris[J]. Science, 2006, 311(5759):340.
[2]BERNHARD R P , CHRISTIANSEN E L , KESSLER D E . Orbital debris as detected on exposed spacecraft[J]. International Journal of Impact Engineering, 1997, 20(1-5):111.
[3]CARRASCO C, MELCHOR-LUCERO O, OSEGUEDA R, et al. Damage-potential comparison of spherical and cylindrical projectiles impacting on a system of bumper plates[J]. International Journal of Impact Engineering, 2006, 33(1): 143.
[4]HERNANDEZ V S, MURR L E, ANCHONDO I A. Experimental observations and computer simulations for metallic projectile fragmentation and impact crater development in thick metal targets[J]. International Journal of Impact Engineering, 2006, 32(12): 1981.
[5]王小峰,陶鋼,闻鹏,等. SPH方法在超高速撞击问题中的应用研究[J]. 兵器装备工程学报,2019,40(9):7.
[6] 迟润强. 弹丸超高速撞击薄板碎片云建模研究[D]. 哈尔滨:哈尔滨工业大学,2010.
[7]WATSON E, GULDE M, HIERMAIER S. Fragment tracking in hypervelocity impact experiments[J]. Procedia engineering, 2017, 204: 170.
[8]JARABO-AMORES P, ROSA-ZURERA M, DE L M D, et al. Spatial-range mean-shift filtering and segmentation applied to SAR Images[J]. IEEE Transactions on Instrumentation and Measurement, 2011, 60(2):584.
[9]LIU Wei, DUAN Yubo, SHAO Keyong, et al. Image smoothing based on the mean shift algorithm[C]// IEEE International Conference on Control & Automation. Guangzhou:IEEE, 2007:1.
[10]CANNY J. A computational approach to edge detection[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,1986,8 (6):679.
[11]RONG W, LI Z, ZHANG W, et al. An improved Canny edge detection algorithm[C]//2014 IEEE International Conference on Mechatronics and Automation. Tianjin,China:IEEE, 2014: 577.
[12]ACHANTA R, SHAJI A, SMITH K, et al. SLIC superpixels compared to state-of-the-art superpixel methods[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2012, 34(11): 2274.
[13]REN Yuheng, REID I. gSLIC: A real-time implementation of SLIC superpixel segmentation[R]. UK:University of Oxford,2011.
[14]SINGH M, PATEL P, KHOSLA D, et al. Segmentation of functional MRI by K-means clustering[J]. IEEE Transactions on Nuclear Science, 1996, 43(3): 2030.
[15]OSHER S, FEDKIW R, PIECHOR K. Level set methods and dynamic implicit surfaces[M].New York: Springer-Verlag, 2002.
[16]LI C M, XU C Y, GUI C F, et al. Distance regularized level set evolution and its application to image segmentation[J]. IEEE Transactions on Image Processing, 2010, 19(12): 3243.
[17]SALARNA G I, ABBOTT A L. Moment invariants and quantization effects[C]//1998 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (Cat. No. 98CB36231).Santa Barbara,CA, USA: IEEE, 1998: 157.
[18]TEH C H, CHIN R T. On image analysis by the methods of moments[C]//IEEE Transactions on Pattern Analysis and Machine Intelligence, 1988,10(4): 556.
猜你喜欢
科技创新与应用(2017年25期)2017-09-09
电子技术与软件工程(2016年22期)2016-12-26
科技视界(2016年26期)2016-12-17
电脑知识与技术(2016年24期)2016-11-14
电脑知识与技术(2016年24期)2016-11-14
通信产业报(2009年1期)2009-06-09
