一种雷达天线俯仰伺服控制单元的设计与实现
2020-07-04 08:53石小萍高丰佳
科学技术创新 2020年18期
石小萍 陈 丁 高丰佳
(1、西安黄河机电有限公司设计研究所,陕西 西安710043 2、西安工业大学光电工程学院,陕西 西安710021)
1 概述
根据雷达系统战技指标要求,俯仰伺服控制单元主要完成以下功能:
(1)根据中心控制系统控制指令,实现对天线俯仰角的位置引导控制;
(2)具备通过作战控制台按钮实现对天线俯仰角的控制功能;
(3)在天线俯仰角运转达到设置的极限位置时,俯仰控制系统具有电气与机械限位,并具有自动保护措施;
(4)实时采集天线俯仰角位置,反馈给中心控制系统;
(6)能够在作战控制台的控制下完成随动精度检查;
(7)对系统及主要功能模块具备功能检测、故障检测及故障定位功能,并送出检测结果。
为了实现上述功能,本文提出一种雷达天线俯仰伺服控制单元的设计与实现的方案,将在下文中将进行详细的论述。
2 研制指导原则
本系统的设计应遵循以下设计原则:
(1)采用高精密伺服控制结构和全数字驱动控制电路,在确保系统性能指标的前提下,力求体积小、重量轻;
(2)充分利用CAD 设计,运用可靠性、维修性、安全性、保障性和优化设计技术,使设计获取最佳使用效能;
(3)正确应用计算公式,合理选择设计参数,保证计算结果的正确性;
活性炭吸附能力检测是活性炭经再生工艺处理后出厂前的最后一道工序,也是检验其再生合格率的必须流程。一般的检验方式包括苯酚吸附法、碘吸附法和亚甲基蓝吸附检验法等。其中碘吸附测试是较为常用的一种测试手段。由于活性炭具有非常强的碘吸附能力,因此用吸碘值来评估活性炭性能的方法是相对科学的检测方法。对碘的吸附效果越明显,则活性炭的比表面积越大,吸附能力越强。通过观察再生产过后活性炭对碘吸附效果的检验,测试再生活性炭的活化效果,能够相对客观的评估再生产效果。经系统吸附测试检验,在本文再生工艺下的活性炭活化效果基本能够实现较好的吸附效果,具备恢复上市条件。
(4)充分利用成熟技术,提高产品通用化、系列化、模块化程序;
(5)合理选用原材料、元器件,尽可能减少品种和规格;
(6)合理提出加工要求,设计应具有良好的工艺性;
(7)正确贯彻各级技术标准和规定,保证设计文件齐套、完整。
3 主要技术指标与功能
本伺服控制单元主要战技指标和功能为:
(1)运行范围:0°~60°(跟踪);
(2)锁定位置:锁定角度为0°(天线法线水平时);
(3)运行速度最大运行速度:14Ps;
(4)跟踪速度:0.1~13 度/s;
(5)手动控制运转速度:慢速:3 度/s、中速:8 度/s、快速:12度/s;
(6)位置指示精度:≤0.1mil;
(7)静态误差:06≤0.2mil;
(8)跟踪误差:≤1.5mil;
(9)撤收:0°;
(10)码盘数据刷新周期:≤1ms。
4 设计方案
4.1 组成和配置
俯仰伺服控制单元组成:驱动控制组件/俯仰托架箱/平衡配重箱/俯仰执行装置/电机反馈电缆/电机驱动电缆/电动锁销电缆。
4.2 工作原理
4.2.1 组成和功能
俯仰伺服控制单元主要由U 型架、俯仰执行电机、俯仰驱动控制组合、俯仰码盘、减速器等组成。系统通过高速RS422 接口与中心控制系统进行数据交换,根据接收指令完成各项俯仰角控制功能。俯仰伺服控制单元组成和功能框图如图1 所示。
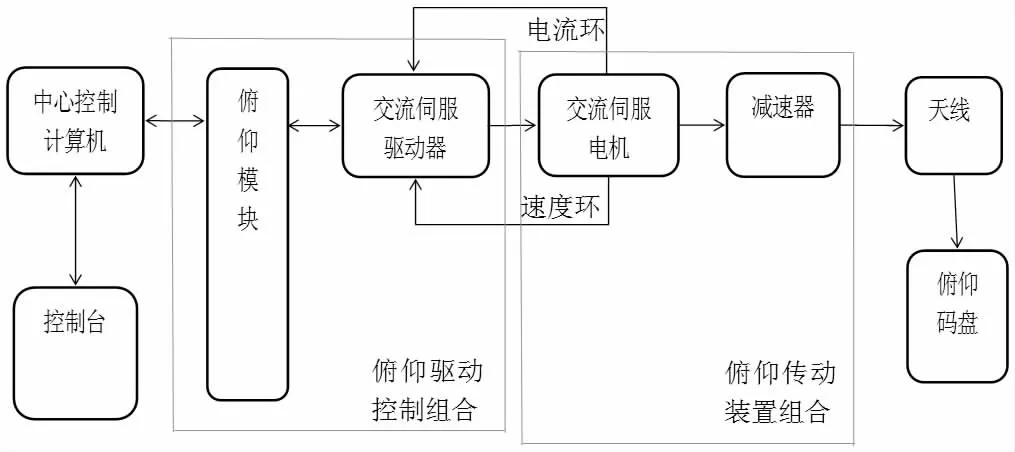
图1 俯仰伺服控制单元组成和功能框图
4.2.2 控制策略
控制系统采用多环路结构的复合控制,亦可称为前馈+反馈控制系统。其结构图如图2 所示。电流环构成电枢电流负反馈,以减小电源电压波动的影响,提高控制力矩的线性度,以使系统恒流起、制动,同时防止功率转换电路以及电机过流。速度环构成速度稳定环。提高系统抗负载干扰的能力,达到天线转速平稳的要求。位置环采用积分分离PID 控制,以减小超调量,解决定位精度和动态响应速度之间的矛盾。前馈控制的各个调节器是由计算机来实现,也可以称为计算机前馈控制。利用俯仰伺服控制系统的各阶导数(位置、速度)可测量和可实时计算的特性,利用各阶导数,采用aβ 滤波算法进行前馈控制计算,由此构成前馈控制和反馈控制相结合的复合控制系统。
4.3 交流伺服电机优点
系列交流伺服电动机由定子、转子、高精度反馈元件(旋转变压器)组成。采用高性能稀土永磁材料形成气隙磁场,具有如下优点:结构紧凑,功率密度高;转子惯量小,响应速度快;超高矫顽力稀土永磁;抗去磁能力强;几乎在整个转速范围内可恒转矩输出;低速转矩脉动小,平衡精度高,高速运行平稳;噪音低、振动小;全密封设计。
4.4 工艺性分析
本系统在设计中充分采用成熟的技术以及标准化模块,人性化的结构形式而化了加工工艺,生产过程无需特殊工装,相应地降低了生产成本。俯仰驱动控制组合、俯仰传动机构大多数零件和工艺在以往产品上已经采用,加工精度容易得到保证,可以有效保证产品的安装精度和工艺性能。
4.5 技术特点
针对俯仰伺服控制系统的负载特点、工作形式以及技术指标的要求,77 俯仰何服控制单元均采用全数字交流伺服控制系统,通过全数字驱动控制电路、精密减速机构和高精度码盘,可以达到极高的定位精度,满足高精度伺服控制要求。
(1)全数字控制技术:电流环、速度环和位置环全数字化控制。与模拟式伺服产品相比,动态特性好,控制精度高,调速范围宽,集成度高,抗干扰能力强,稳定性强。
(2) 先进的体系结构: 采用国际先进的基于专用DSP+MCU+FPGA+IPM 的平台式结构,基于永磁电|机动态解耦数学模型的矢量控制方法,全面保证调速范围、定位精度、稳速精度、动态响应和运行稳定性等指标。
(3)符合军用条件的产品:选用符合军用条件的交流伺服驱动器,生产厂家具有较强的技术实力和生产能力,具有稳定可持续供货的能力,并可提供相应的技术支持。
5 结论
本方案在对俯仰伺服控制单元进行了认真的分析和计算,详细设计了系统的组成、控制结构和各组合、模块的接口关系,并对俯仰伺服控制单元的工作原理进行了较为详细的阐述。
俯仰伺服控制单元采用目前国内最新一代全数字交流伺服驱动系统,使俯仰伺服控制单元的控制性能、控制精度及稳定性得到了较大提升,提高了俯仰伺服控制单元的先进性和可靠性。在控制上采用了多环路复合控制结构,使用单片机作为主控单元,系统调控方便灵活。主控计算机与交流伺服驱动器之间采用RS422 通讯接口,避免了模拟量控制固有的零漂现象,有效提高了俯仰何服控制单元低速性能和控制精度,实现了真实意义上的纯数字控制。由于采用了交流伺服电动机、无刷旋转变压器、TL16C754B 串口芯片等高可靠性元器件;各组合和功能模块任务分配合理,集成度高。同时针对交流伺服电机控制提出了较全面的EMC 解决方案,因而使得俯仰伺服控制单元具有良好的可靠性与电磁兼容性。
猜你喜欢
成都信息工程大学学报(2022年2期)2022-06-14
英语文摘(2022年4期)2022-06-05
汽车实用技术(2022年7期)2022-04-20
建材发展导向(2021年12期)2021-07-22
房地产导刊(2020年11期)2020-12-28
童话世界(2020年32期)2020-12-25
当代陕西(2019年8期)2019-05-09
中学生数理化·八年级物理人教版(2019年3期)2019-04-25
发明与创新·大科技(2018年2期)2018-03-17
养生保健指南(2017年5期)2017-05-26