
塔机智能化发展之路
2020-07-01 07:33尚立强
建筑机械 2020年5期
尚立强,张 均
(陕西建设机械股份有限公司,陕西 西安 710200)
全球第1台塔机1905年诞生于欧洲,与1902年首次出现的飞机属于同年代的产品。纵观飞机的百年历史,无论从外形、动力系统、操控系统都发生了翻天覆地的变化,然而塔机历经百余年却几乎保持着原样,在智能化、自动化方面没有实质性的进步。
20世纪以来,人类科技的进步日新月异,通讯技术、遥感技术、计算机技术乃至航天技术都得到了跨越式发展。传统机械与这些技术相结合,出现了无人驾驶汽车、集装箱码头无人化自动装卸等,甚至连居所也实现了智能化。而在全球建设项目中不可或缺的塔机,却为何没有与时俱进呢?近30年来中国基
建规模不断扩大,在市政建设、交通建设、工业建设、商业与民用地产建设项目中塔机的应用越来越广泛,目前国内市场存量已超过40万台。5G时代的到来,会给塔机带来何种变化?
1 塔机1.0
本文借鉴软件版本升级的模式,把传统的塔机定义为塔机1.0。
典型的塔机由塔身、前臂(起重臂)、后臂(平衡臂)、驾驶舱和顶升系统等构成。驾驶员位于塔身上部的驾驶仓中,听从对讲机传来的指挥人员的语音指令,操作机械式手柄控制前后臂的旋转、钢丝绳的收放来完成构件的吊装任务。
传统的塔机几乎是纯机械构造,依靠齿轮传动来换挡调速,仅具有简单的电器系统,发展到近年才出现了变频控制,但仍不属于换代的变化。
塔机最普遍的应用场景就是立在建筑工地,负责将钢筋、模板、钢结构部件等从地面吊至施工所需的楼层和部位。绝大多数时候对起吊点和落点的精度要求很低,只需在大致范围内即可。

2 塔机2.0
2015年后,国家提出建筑产业化概念,并大力推行装配式建筑,对建筑施工带来了革命性的变化,塔机也从传统的2t以内的散件吊装变成对4~15t集成构件的整体吊运。重要的是,装配式构件拼装需要毫米级的高精度,而传统塔机从设计到操控都是无法满足的。市场需求是最大的推动力,塔机2.0应运而生。以2017年面世的STC7528智能型塔机为代表机型,属全球首创。
STC7528塔机增加了大量的软硬件投入。硬件方面,除增设电脑和触摸屏外,还在塔身关键部位设置了控制器并加装了摄像头及多个传感器。软件方面,通过塔机原有的PLC控制系统中提取数字信息并结合新增硬件的数据传输,通过编程对信号进行解读分析及反馈,最终经由电控程序实现对塔机动作的实时控制。通过程序的运算,机载电脑将驾驶员的单一动作指令解析为无数个快速、细微的动作指令,自动控制回转、变幅、起降等协同联动,实现了防摇、防抖动、防断绳、精确就位等前端功能。系统后台通过对数据进行归类、分析,建立数据库。通过大数据分析软件形成各类需要的报告,实现以下扩展功能:
(1)故障预警及处理[1]。
大数据中包括塔机发生某一故障时各系统的动作参数,诸如相关电流、电压的数据、吊装状况等,会形成一定的概率分布。通过数据积累,可在出现相似数据情况下,系统提前自动给出警示避免故障发生。即使出现故障,也能迅速反馈出故障代码和语音提示,指导快速排除故障并加入故障档案。
(2)事故分析报告。
通过数据库的实时记录,最大程度地还原事发前后的电控数据、塔机动作、吊装数据、音视频数据等,经过综合分析,提出分析报告配合调查组的人工审查(见图1)。
(3)设备履历。
系统不间断地记录单台塔机终生的工作情况,包括日常的吊次、故障及维修、事故等细节,形成最客观完备的设备履历,便于评估。同时,可根据所属型号对该型号的整体产品综合评估提供数据支持。
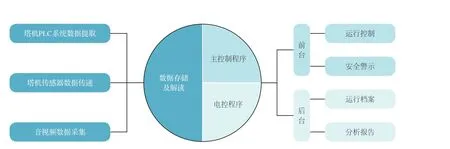
图1 塔机2.0功能控制图
(4)操作人员档案。
操作人员经过指纹及面部识别获权操作,同时也记录了该操作员在本机的出勤、操作习惯、事故、保养等情况,结合其他设备的同样记录,可形成操作员档案,据此出具业绩和能力的客观评估。
(5)易损件更换及配存。
通过大数据分析,对易损件例如钢丝绳的磨损、更换数据形成科学的更换标准,当接近标准时系统持续发出警示或强制更换,避免了以往人工繁琐检查及人为错判带来的隐患。同时,根据易损件更换频次的概率分析,便于科学合理地配置随机库存种类和数量。
综上,塔机2.0具备了初级的智能化控制系统。

3 塔机3.0
通过上述分析,展望未来塔机3.0的出现,它应该具备以下特征或功能:
(1)施工现场三维建模。
通过塔身更多数量的传感器及音视频采集数据,结合建筑物设计图纸及施工现场实物坐标,建立工地整体的实时动态三维模型,实时输出到显示装置上。
(2)一键返航功能。
塔机的起升、回转、变幅、行走等各系统之间实现交互功能及数据共享,形成单机数据中心,且具备了轨迹记忆能力。在起吊点和终落点之间,自动记录构件在三维模型中的行进轨迹。批量吊装任务时,操作员在进行安全判断后可利用一键返航功能,程序即可按轨迹逆向自动操控各系统的动作实现自行返回起吊点,极大地提升工作效率。
(3)可靠的防干扰通讯技术。
充分利用5G技术的发展,通过信号加密实现安全可靠且能防止现场各种电磁干扰的通讯能力。
(4)智能屏蔽误操作。
根据实时三维建模及对现场各种障碍物和运动态物体的实时监控,塔机已经具备了全视线能力,具有成熟的避障功能。对来自操作员视线不及甚至纯粹手误导致的误操作,能自主识别并屏蔽该指令,最大程度上杜绝操作员人为因素造成的事故隐患。
(5)无舱驾驶。
在上述前提下,塔机驾驶舱可以省略掉,驾驶员可以通过手持设备在施工现场适当的安全位置进行遥控操作。这就极大地改善了驾驶员的工作环境和上下塔机的不便,并且彻底地避免了驾驶员在极端状况下的生命安全之虞(见图2)。
综上,塔机3.0结构上舍去了驾驶舱,但具备了升级的智能化控制系统,能较大地提高工作效率。基于科技的发展动态,预计在2025年前即可面世。
4 塔机4.0
再升级的塔机就不再是仅仅自身范畴的进步,而是具备了与环境交互的能力,并借力于相关领域的发展,即完全融入未来施工现场的智能化框架之中。到达4.0级别的塔机将极大地缩短与其他自动化设备之间的差距,成为届时新发展的建设项目最需求的利器。
4.1 相关领域的发展预期
(1)机联网。
首先,施工现场所需的各类设备业已平行发展出了智能化技术,成为施工现场“机联网”中的成员,成员之间实现数据共享和实时交互。其次,基于高度发展的互联网和通讯技术的进一步升级,机联网与工地之外的智能化路杆、智能化车辆、气象设施等也将实现互联互通,形成工地内外的数据流。
(2)环境集成。
届时,塔机4.0已成为数据处理中心,对所有上述数据流进行“环境集成”,全面掌握必要范围内的一切状态数据。
(3)吊具标准化。
如同物流行业的零担与标准箱,统一化的标准吊具分为A、B组件。塔机吊钩被组件A取代,千斤绳由滑轮组与组件A之间自动伸缩器取代,构件单体或散件装箱的顶部为组件B。组件A、B靠近后,类似航天器自动对接,实现可靠的电磁吸合和机械锁定。这样不仅节省了司索的人工、千斤绳的更换,而且大量节省了绑扎入钩的时间,安全性和工作效率均得到进一步提升(见图3)。
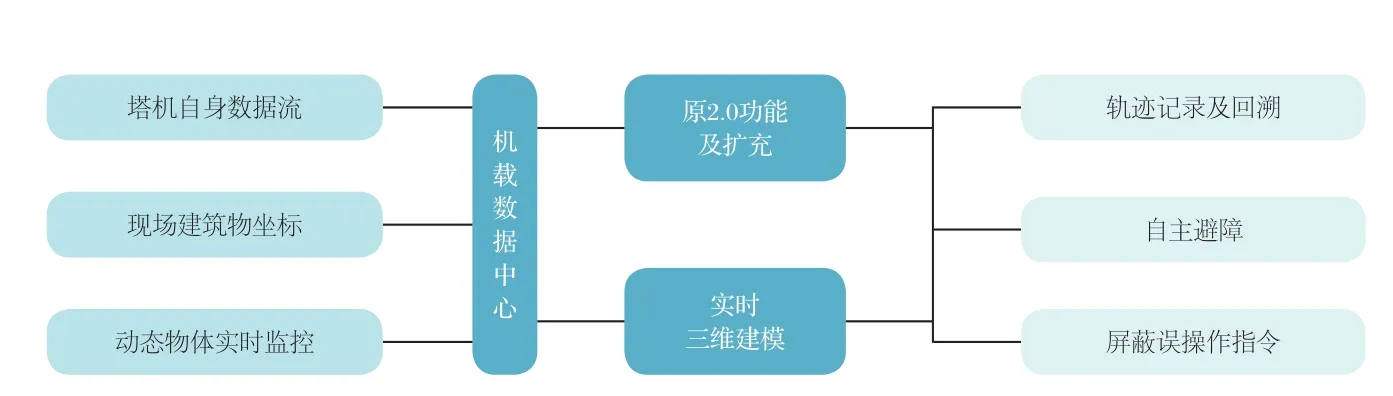
图2 塔机3.0功能逻辑图

图3 塔机4.0功能控制图
4.2 塔机4.0具备的功能和特征
(1)自动寻址。
经过环境集成的机载控制中心,知晓任一吊件在施工现场的位置三维坐标。吊件的组件B上有该吊件的识别编码和冗余定位信息,组件A(即“吊钩”)由机载控制中心指令运行至吊件附件,即可根据上述识别信息进行确认及准确就位、完成对接。
(2)三维导航。
在3.0的一键返航功能基础上,基于环境集成技术的实现,塔机4.0可在起吊与落点坐标之间实现三维导航和自动运行到位。
(3)任务单模式。
如同当今执行可编程的数控加工设备,塔机4.0接收到编程的吊装任务清单,会根据清单内容与相关作业面的智能信息进行沟通,根据各作业面的进度和需求实时计算出最佳的吊装各构件的先后顺序,自动运行到吊件的正确坐标位置,核实后进行对接。之后按照任务清单上的三维坐标数据,实时计算和调整最佳路径到达卸落点。同样卸落点也无需指挥工和司索工,安装人员中事先指定授权的人员发出语音指令,经核实确认即可自行解除对接,并更新任务清单后执行下一吊装任务。
(4)无人驾驶[2]。
任务单模式使得塔机4.0摆脱了传统的机械手柄指令、遥控器具体动作指令,因此操作员无需出现在工地,只需在设备提供商自身的操控中心。1个远程控制员可以监控多台塔机的运行,特殊情况下接到塔机发出请求信号之后进行必要的操作,除此之外基本无需干预。
综上,塔机4.0的应用现场免去了操作员、指挥工、司索工和千斤绳及绑扎、挂钩等人力和工序,将极大提升工作效率,降低施工成本。但这一步的实现需要相关领域的协同作用,期待在2030年左右或可实现。
5 结束语
科学和技术的发展无止境,本文基于业界的现状做了有限的展望。塔机的智能化发展是确定无疑的发展方向,我们相信,随着科技的进一步发展和业界的共同努力,今天的展望终将成为现实。
猜你喜欢
军事文摘(2022年13期)2022-08-27
建筑机械化(2022年3期)2022-04-20
科学与财富(2021年33期)2021-05-10
中国军转民(2020年8期)2020-11-28
石油化工建设(2020年1期)2020-08-24
当代旅游(2019年3期)2019-09-19
建筑机械化(2018年3期)2018-05-23
中国公路(2017年19期)2018-01-23
科学与财富(2017年24期)2017-09-06
中国核电(2017年2期)2017-08-11
