一种改进线圈结构的AUV无线充电系统
2020-07-01 02:53:32刘润鹏杨金明
水下无人系统学报 2020年3期
刘润鹏, 杨金明
一种改进线圈结构的AUV无线充电系统
刘润鹏, 杨金明
(华南理工大学 电力学院, 广东 广州, 510640)
通过应用无线充电技术, 可以将自主水下航行器(AUV)制作成全封闭状态, 避免海水腐蚀, 消除漏电的危险。为解决AUV无线充电过程中可能存在的电磁干扰问题, 优化线圈结构, 文中设计了一种改进线圈结构的AUV无线充电系统, 可应用于AUV充电装置中。ANSYS MAXWELL的仿真结果表明, 所提出的线圈结构能够使耦合磁场主要分布于AUV外壳附近, 最大程度地降低了对AUV内部器件的影响, 且在发生旋转偏移时仍能保持互感的稳定。实验结果表明, 所搭建无线充电系统在发生旋转偏移时输出电压波动小于10%, 传输40 W电能的效率约为70%。
自主水下航行器; 无线充电; 电磁干扰; 线圈
0 引言
随着人类对海洋探索范围的扩大, 海洋移动自主观测装置的应用方兴未艾。其中, 自主水下航行器(autonomous undersea vehicle, AUV)通过海洋巡查和监测, 可以为岸上人员提供有价值信息, 在海洋探索和开发中发挥着越来越重要的作用。实际使用中, AUV所携带的电池电量有限, 需要返回充电。目前常用的充电方式一般是将AUV打捞上岸更换电池或重复充电, 这些方法不仅费时费力, 而且频繁更换电池可能导致接触不良问题[1]。
为了使AUV的充电过程更加便捷高效, 水下无线充电技术受到了广泛重视。通过无线传输电能的方式, 不仅免去了将AUV打捞上岸的环节, 还有望将整个航行器制作成全封闭状态, 既能避免被海水腐蚀, 还能消除充电时摩擦和漏电的危险。
然而, 目前对于AUV无线充电的研究大多关注于充电效率和水下损耗分析, 较少针对AUV的特殊结构和水下应用场合对线圈结构的优化设计[2]。目前大多数研究采用的线圈结构与陆上电动汽车无线充电采用的线圈结构类似, 发射线圈和接收线圈垂直于AUV的圆柱体轴线上, 使得高频耦合磁场集中在AUV内部, 可能会干扰AUV内部器件的工作。
文献[3]分析了目前几种常见的线圈充电结构的耦合磁场分布, 虽然能够通过优化现有线圈结构, 在传输一定功率时将磁场影响控制在合理范围, 但在传输更大功率时将无法满足要求。文中借鉴文献[4]和[5]中的垂直十字形接收线圈结构, 设计了适用于AUV无线充电的线圈, 使得高频耦合磁场对AUV内部器件的影响尽可能小, 并通过MAXWELL有限元仿真软件研究该线圈结构的耦合磁场分布和抗偏移性能。
在无线电能传输系统中, 补偿拓扑对电能传输的影响也很大。常用的补偿拓扑包括最简单的原边串联-副边串联(S-S)补偿拓扑以及较为复杂的原边电感电容电感-副边电感电容电感(LCL- LCL)拓扑。AUV无线充电的发射线圈和接收线圈距离较小, 因此对无线电能传输距离要求不高, 可采用较为常见的S-S补偿拓扑, 即发射和接收线圈各自串联谐振电容的补偿方式。这样可以提高电能接收部分的集成度, 降低制造成本。为了验证系统是否在发生旋转偏移时维持电压恒定并以较高效率传输电能, 将搭建实物电路验证。
1 改进结构线圈设计
1.1 基本结构
在无线电能传输中, 传输线圈的结构对传输效率和传输能力有较大影响, 对于AUV的水下无线充电应用场景, 还需考虑AUV本身结构较小、内部器件紧密度高、存在旋转偏移等问题。AUV的无线充电传输线圈的设计原则应考虑以下几方面:
1) 线圈形状应与AUV的圆柱体结构贴合, 尽量减少传输线圈和接收线圈之间的距离;
2) 在保证传输效率和传输功率的前提下, 应优化线圈结构, 控制磁芯用量, 尽量减小充电装置的体积和重量;
3) 当AUV存在旋转偏移时, 所设计的线圈能够保持互感参数的稳定, 实现稳定的输出功率;
4) 尽量缩小传输线圈产生磁场在AUV中的分布范围, 减少高频磁场对AUV内部器件的干扰。
目前大多数研究所采用的发射线圈和接收线圈都是空心圆盘形, 且处于同一轴线上, 这种结构能够保证较高的传输效率, 且不存在旋转偏移带来的互感波动问题。然而由于传输线圈与AUV同轴线, 线圈间的耦合磁场将集中于AUV内部, 虽然能通过优化线圈和磁芯的设计保证一定功率下磁场对其他器件的干扰保持较低水平, 但随着传输功率的增大, 磁场干扰将越发难以避免。为此, 设计非同轴线的传输线圈十分必要。
文献[4]中介绍了一种消化道胶囊形内窥器的无线充电线圈设计, 为配合内窥器的较小体积和旋转偏移, 采用了垂直十字形的接收线圈, 该接收线圈在胶囊形内窥器发生旋转偏移时仍能保持传输功率的稳定, 且磁场的传输方向和胶囊形内窥器的轴线正交。该种类型的接收线圈示意图如图1所示。如果将这种无线电能传输的设计思想应用于AUV的水下充电中, 使接收线圈和高频磁场与AUV的轴线正交, 将有望减少高频磁场对AUV内部器件的影响。
图1所示的接收线圈由线圈和线圈组成, 两接收线圈互相垂直, 平行于高频磁场。当磁场频率为且方向为图中轴负方向时, 与线圈的夹角为, 此时可得出穿过两线圈的磁通量和感应电压为


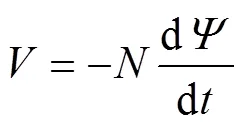
式中:Ψ代表通过线圈的磁通量;Ψ代表通过线圈的磁通量;为磁场强度;为线圈和线
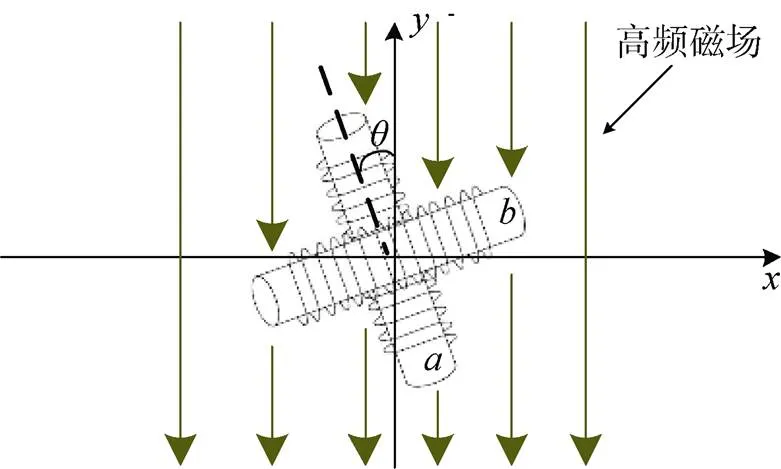
图1 垂直螺旋线圈示意图
圈的线圈面积;为两线圈各自的匝数。
若接收线圈和接收线圈串联在一起, 则总磁通量为

由上式可以发现, 在特定角度下, 磁通量有可能一直为0, 所以一般不采取直接串联方式。但若将线圈和线圈直接并联在一起, 由于线圈和线圈的输出电压一般情况下不相同, 可能出现耦合系数较大的线圈被短路解耦的问题[4]。后文将主要研究两接收线圈经过整流后再串联或并联的方式。
将上文中垂直十字形接收线圈的设计思路应用于AUV无线充电的线圈设计中, 设计出如图2所示的无线充电线圈结构。
所设计的无线充电线圈的发射线圈和接收线圈由利兹线圈和方条I型锰锌铁氧体磁芯组成。其中发射线圈包含8个绕在铁氧体磁芯上的线圈1~8, 8个线圈串联组成发射线圈, 贴合AUV外壳。通过改变线圈绕向, 使得1和5、2和6、3和7、4和8的磁场方向相同, 整个发射线圈所产生的磁场分布如图2所示。
接收线圈包含4个绕在锰锌铁氧体磁芯上的绕组, 其中线圈1和线圈2串联在一起, 组成线圈, 相当于图1中的线圈, 线圈1和线圈2串联在一起, 组成线圈, 相当于图1中的线圈。2个接收线圈互不相连, 贴近AUV内壁。
1.2 旋转偏移分析
由某一磁芯上的发射线圈产生的磁通将主要与靠近该磁芯的接收线圈耦合, 使得高频磁场主要分布于AUV外壳附近的小片区域, 对于AUV的其他部分影响较小。
通过以上分析, 2个接收线圈的组合不能采取直接串联或直接并联的方式, 对于2个线圈各自经整流后串联或并联的连接方式, 展开以下讨论。
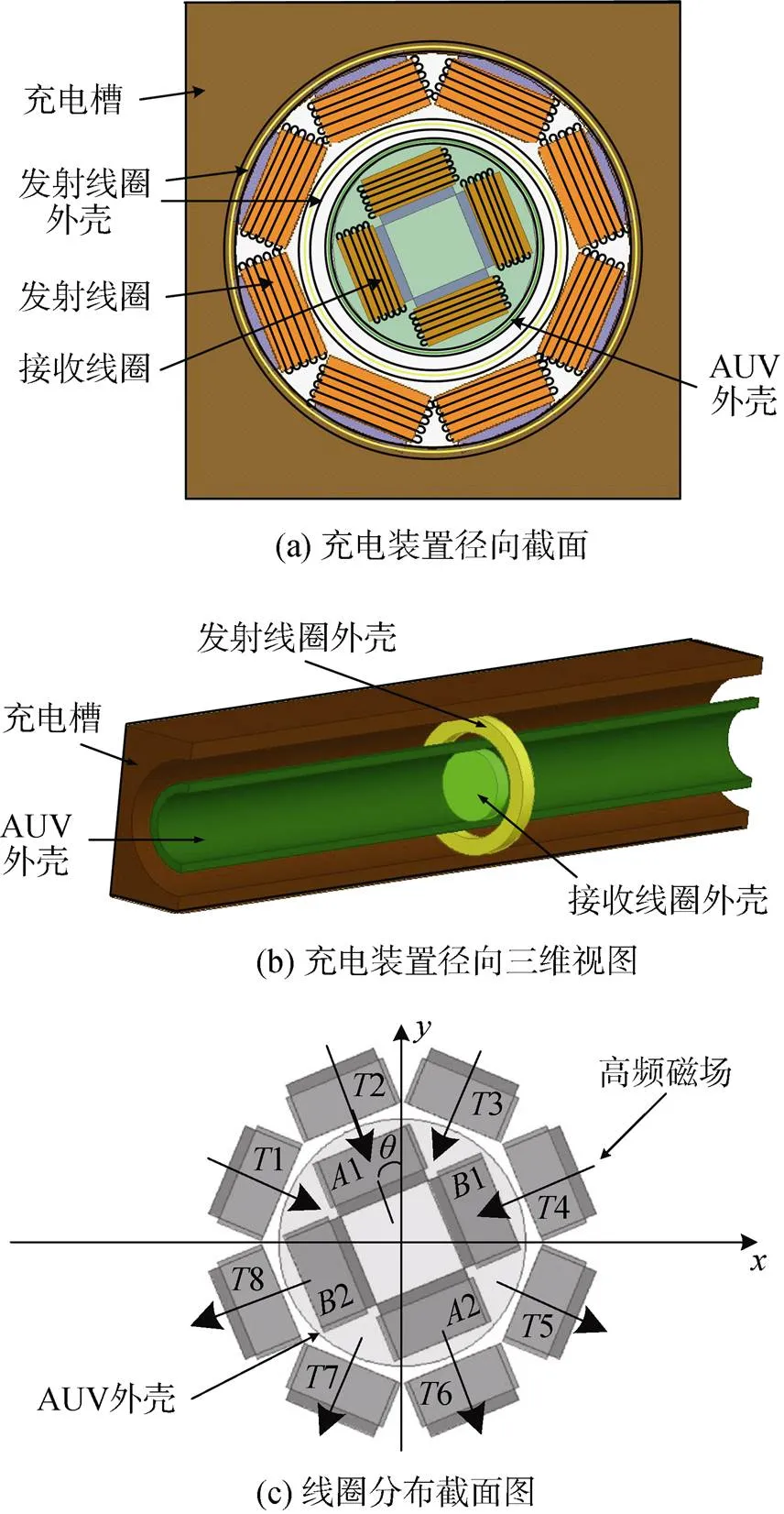
图2 改进结构线圈示意图
如果2个接收线圈采取各自整流后再串联的方式, 由于串联对同一负载供电, 流过2个接收线圈的电流幅值一定相等, 但相位可能相同, 也可能相差180°。虽然相位会有差异, 但两线圈经过整流的输入直流电压可以加和, 因此接收线圈和发射线圈之间总互感可表示为

式中:M为发射线圈和接收线圈之间的互感;M为发射线圈和接收线圈之间的互感。
如果2个接收线圈采取各自整流后再并联给负载供电, 易知只有输出电压较大的线圈才能经过整流输出, 输出电压较小线圈的整流桥将无法导通, 由此可得此时接收线圈和发射线圈之间总互感为

采用整流后串联的总互感明显大于整流后并联的总互感, 但是在线圈设计中, 另一个需要考虑的因素是由于水下洋流作用, AUV可能存在一定的旋转偏移, 产生图1中θ角。为了验证在发生旋转偏移时哪种连接方式能够保持互感的稳定, 在有限元仿真软件ANSYS MAXWELL中搭建了所提的无线充电线圈结构, 如图3所示。
通过MAXWELL的参数扫描功能, 设定角从0~360°每次变化2°, 经整理后得出2种组合方式下发射线圈和接收线圈的总互感变化, 如图4所示。
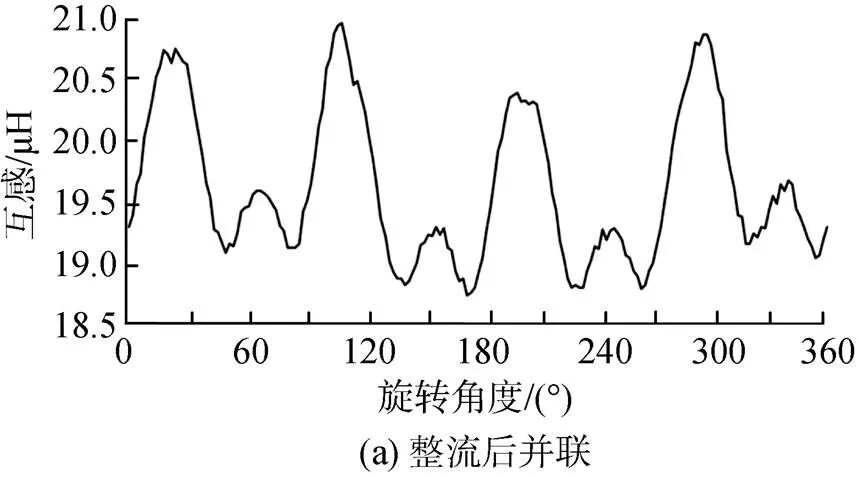
由图可知, 采用整流后串联的总互感比整流后并联的总互感大, 但其波动也较大, 采用整流后并联的总互感基本维持在20 μH左右, 因此文中将采用线圈和线圈经过整流后并联给负载供电的连接方式。
1.3 磁场分布对比
为了验证所提出的设计是否有效减少磁场对AUV内部器件的影响, 在有限元仿真软件ANSYS MAXWELL中将所提线圈结构与较为流行的同轴线圈结构进行对比。为保证对比的准确, 2种线圈结构的体积基本一致, 接收线圈和发射线圈之间的互感也保持一致。每块磁芯的尺寸为40 mm×25 mm×10 mm, AUV外径为11 cm。初步仿真计算出2种线圈结构各自的发射接收线圈的自感和互感后, 将数值分别代入SIMULINK中, 测量出2种线圈结构在相同的外电路设计和负载下, 传输200 W电能时流过发射线圈和输出线圈的电流大小。通过SIMULINK得到仿真中所用到的参数见表1。
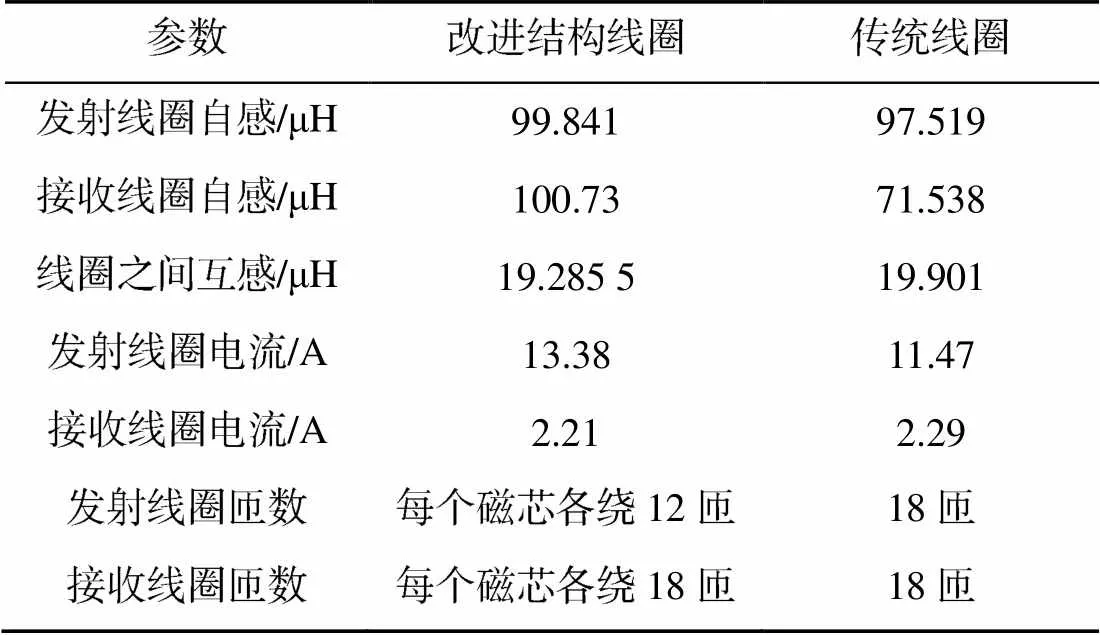
表1 仿真参数列表
将电流数值分别输入MAXWELL中2种线圈的给定激励, 得出2种线圈结构在与轴线垂直和平行的2种截面下的磁场强度分布, 如图5和图6所示。4张磁场强度分布截面图采用完全相同的刻度大小和范围, 从仿真图中可以看出, 在与AUV轴线垂直的-截面上, 2种线圈结构的磁场分布有所差异, 采用改进结构线圈的磁场多分布在AUV外壳及外围, 采用传统线圈结构的磁场则在发射线圈和接收线圈之间均匀分布。
在与AUV轴线平行的-截面下, 二者差异更为明显, 改进结构线圈的耦合磁场主要分布于发射接收线圈和AUV外壳附近, 而传统无线充电线圈所产生的耦合磁场贯穿AUV舱体, 因此改进的结构线圈的耦合磁场对AUV内部器件的影响更小。
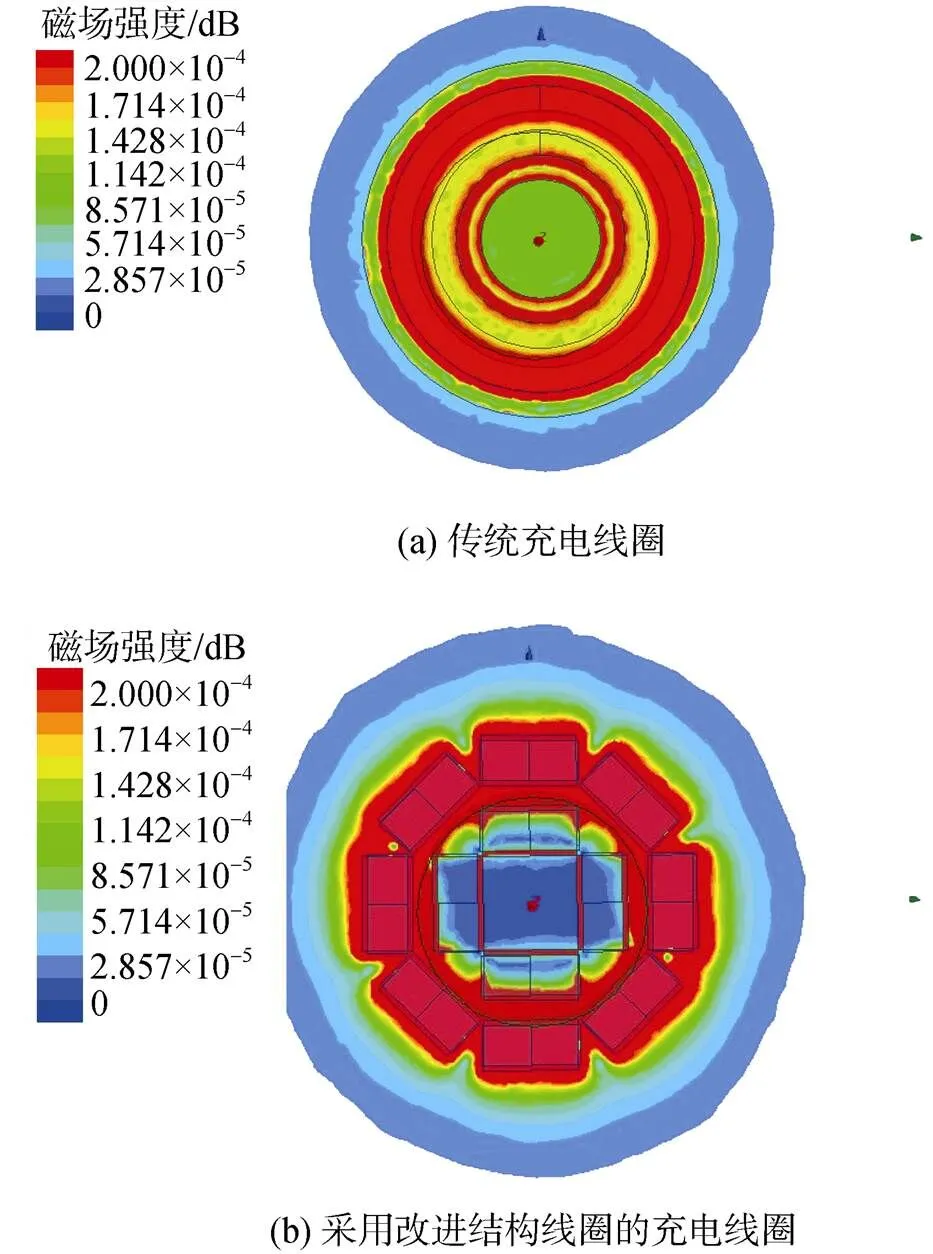
图5 2种无线充电线圈X-Y截面磁场强度图
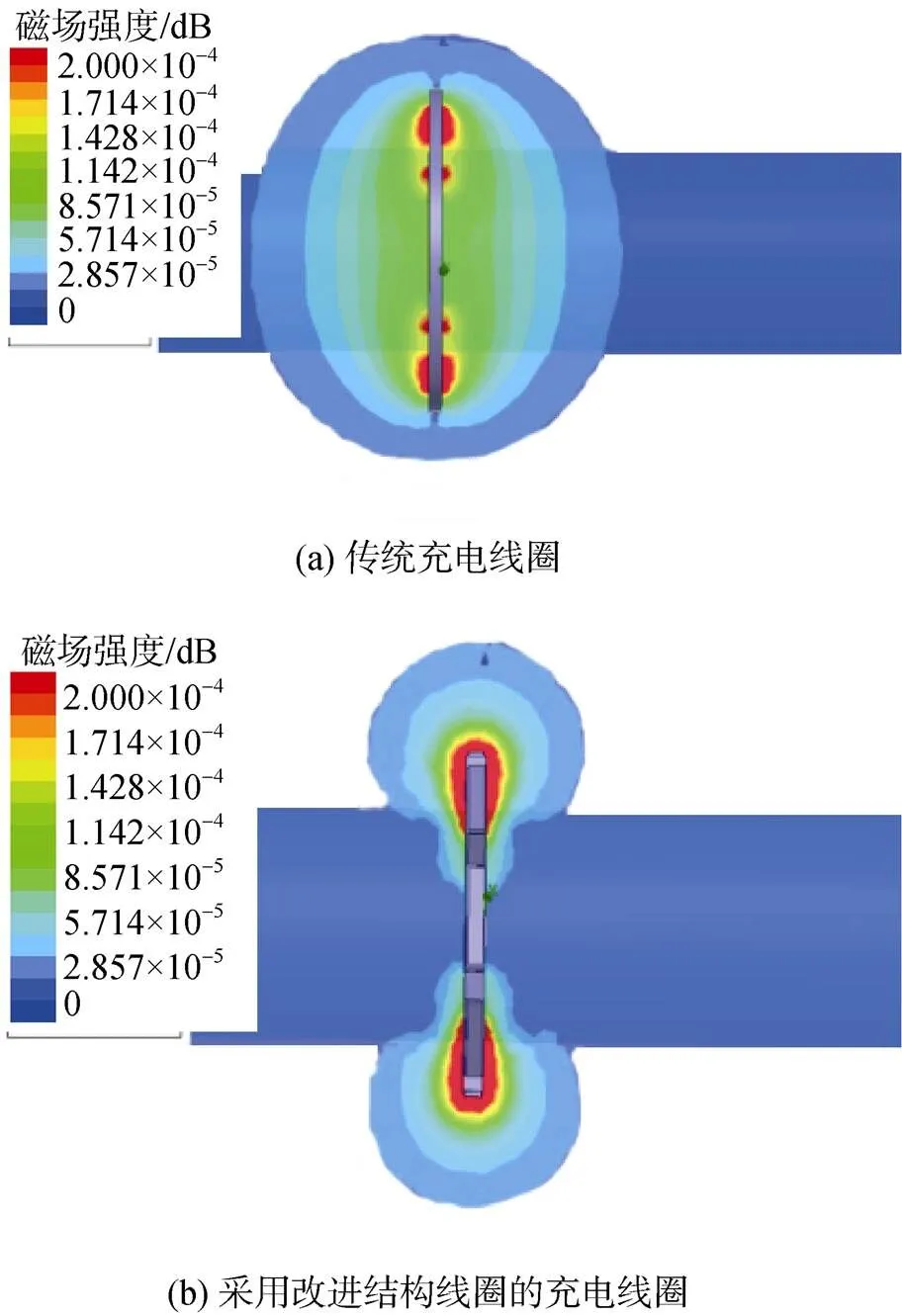
图6 2种无线充电线圈Y-Z截面磁场强度图
2 外电路设计和实验验证
2.1 外电路设计
在无线电能传输系统中, 补偿拓扑影响着系统的传输效率和电压电流大小。补偿拓扑一般是在原边和副边串联(S)或并联(P)电容, 与线圈电感发生谐振。常见的拓扑包括S-S, 原边串联-副边并联(S-P), 原边并联-副边并联(P-P), 也有研究在补偿电容基础上加入电容电感(LC)结构结构, 构成了更为复杂的电感电容电感(LCL)补偿拓扑。
如前文所述,对于AUV无线充电系统,考虑使用S-S补偿拓扑, 提高电能接收部分的集成度, 也能降低制造成本。外电路连接如图7所示。
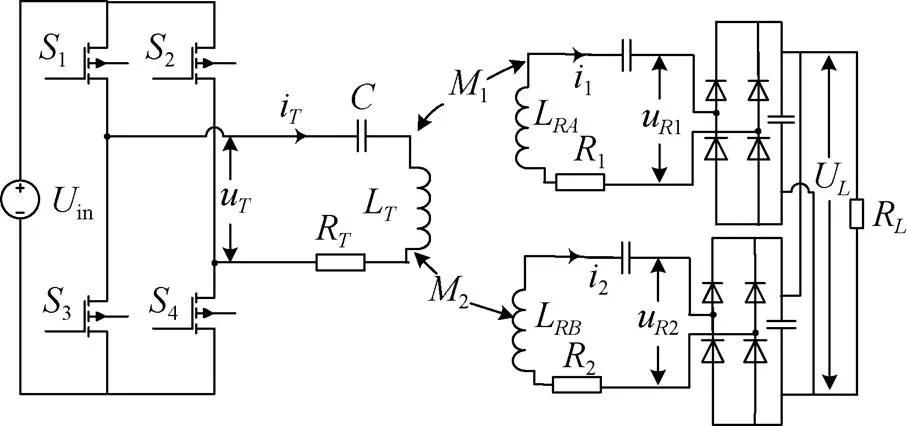
图7 电路连接示意图
尽管电路中有2个接收线圈, 但是由于采用接收线圈采取整流后再并联给负载充电的方式, 且发射线圈和接收线圈之间互感基本恒定, 因此只需分析发射线圈和其中一个接收线圈即可。此外, 由于2组接收线圈相互垂直, 实际中互感极小, 所以忽略接收线圈之间的互感。
图7中,in为直流电压源, 经过1~44个可控开关管组成的逆变桥后, 逆变为方波电压u, 在方波电压作用下发射线圈L产生交流电流i, 使接收线圈侧感产生交流电压jωMi, 经过整流桥后向负载供电, 在S-S补偿拓扑中, 原边补偿电容与原边传输线圈串联谐振, 副边补偿电容与副边传输线圈串联谐振。
2.2 实验验证
为验证系统传输电能的稳定性和传输效率, 搭建出实物如图8和图9所示。其中每块磁芯的大小与MAXWELL中的仿真大小相同, 为40 mm ×25 mm×10 mm。线圈使用3 mm利兹线绕线。电路使用型号为TMS320F28335的数字信号处理器(digital signal processor, DSP)产生占空比50%的100 kHz脉冲信号, 脉冲信号经过IR2110芯片组成的逆变驱动电路放大后, 控制逆变电路中的开关管开断, 其中开关管型号为MOSFET- IRFP260N。接受端的整流桥由4个型号为HER308的二极管组成。发射线圈和接收线圈相距约为15 mm, 输入直流电压为50 V。电路中各元件参数如表2所示。
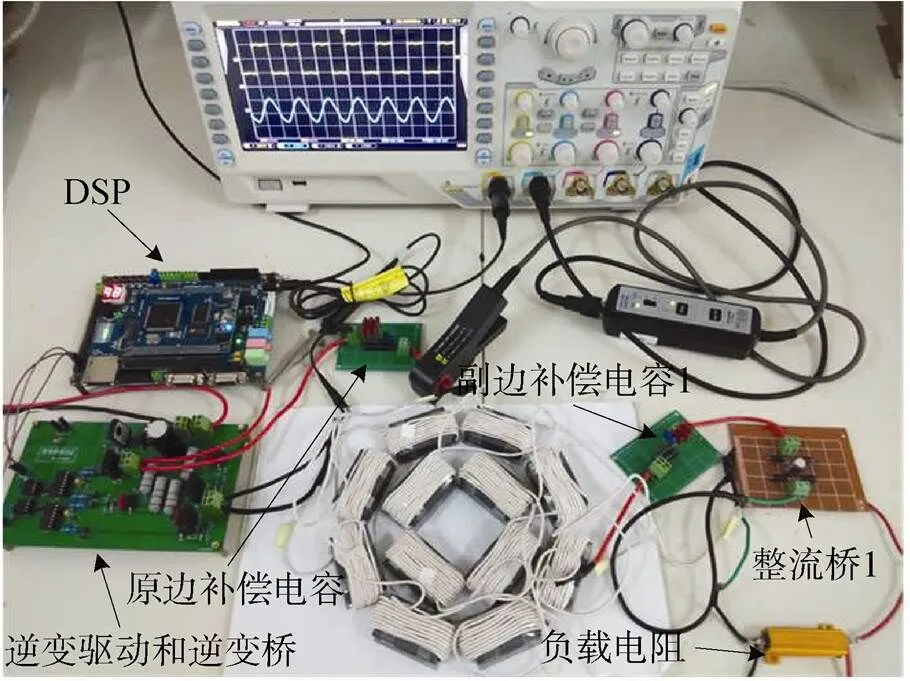
图8 实验电路连接示意图
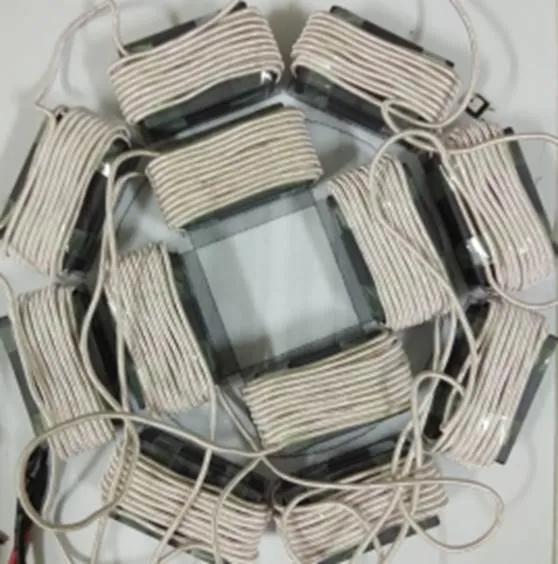
图9 传输线圈实物

表2 实验参数列表
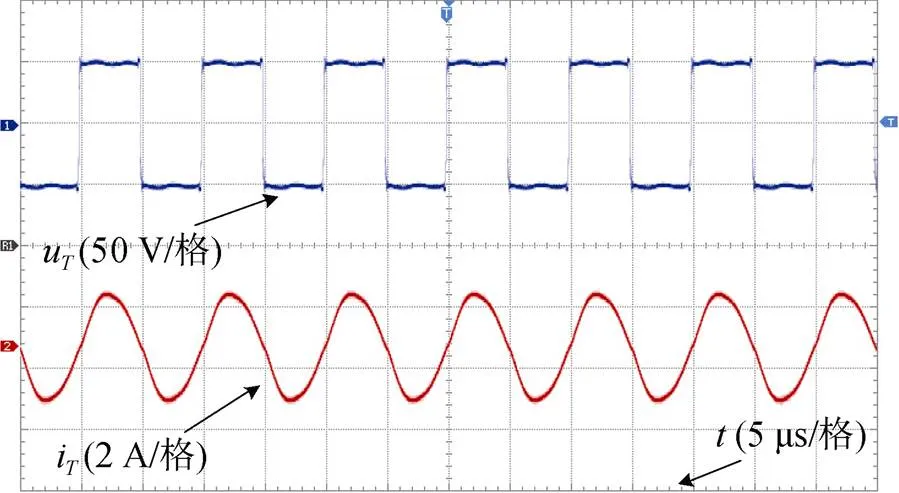
图10 逆变桥输出电压和电流波形
通电后, 逆变桥输出电压和电流经示波器记录后如图10所示。从图中可知, 逆变桥输出±50 V的电压方波。由于电路本身具有一定滤波作用[6], 使得逆变桥输出电流为正弦形, 与电压波形同相位, 说明原边和副边补偿电容已经与所串联的线圈谐振。
当接收线圈分别发生旋转偏移时, 系统的输出电压波动如图11所示。

图11 负载电压波动曲线
由实验结果可知, 当偏移角度在–90º~90º之间时, 负载电压在13.2~14 V之间波动, 电压波动小于10%。经计算, 所搭建无线充电系统的传输效率约为70%。经过粗略分析, 功率损耗集中在耦合线圈。
通过实验可以发现, 改进的线圈结构AUV无线电能传输系统在发生旋转偏移时基本能够保持输出电压的恒定, S-S补偿拓扑能够使系统的电能传输保持较高效率。
需要说明的是, 在实际使用中, 充电槽是置于水下的, 发射线圈和接收线圈之间会有海水存在。不过由于发射线圈外壳和AUV外壳相互贴紧, 之间海水较少, 忽略后影响不大。相关研究也表明, 在耦合频率在100 kHz附近时, 线圈在水下和空气中的电气参数几乎无差别, 涡流损耗引起的效率降低也不明显[7-10], 故文中的无线充电实验没有在水下进行。
3 结束语
文中设计了一种改进线圈结构的AUV无线充电系统, 通过ANSYS MAXELL有限元仿真和搭建实物实验, 验证了所提改进结构线圈可以优化无线电能传输时耦合磁场的分布, 使耦合磁场主要分布于线圈所在截面的AUV外壳附近, 比起传统无线充电线圈所产生的耦合磁场分布在AUV舱体内, 改进线圈结构的无线充电系统对AUV内部器件的影响更小。通过实验验证, 在AUV发生旋转偏移时, 输出电压基本保持稳定, 验证了所提设计的有效性。之后将深入研究水下无线充电的效率提升和海水影响。
[1] Kan T, Mai R, Mercier P P, et al. A Three-phase Wireless Charging System for Lightweight Autonomous Underwater Vehicles[C]//2017 IEEE Applied Power Electronics Conference and Exposition(APEC). Tampa: IEEE, 2017: 1407-1411.
[2] 文海兵, 宋保维, 张克涵, 等. 水下磁耦合谐振无线电能传输技术及应用研究综述[J]. 水下无人系统学报, 2019, 27(4): 361-368.Wen Hai-bing, Song Bao-wei, Zhang Ke-han, et al. Un derwater Magnetically-Coupled Resonant Wireless Power Transfer Technology and Its Applications: A Review[J]. Journal of Unmanned Undersea Systems, 2019, 27(4): 361-368.
[3] Song K, Ma B, Yang G, et al. A Rotation-Lightweight Wireless Power Transfer System for Solar Wing Driving[J]. IEEE Transactions on Power Electronics, 2019,34(9): 8816-8830.
[4] Lee S, Kim J, Son J, et al. Design of Two-Dimensional Coils for Wireless Power Transmission to In Vivo Robotic Capsule[C]//2005 IEEE Engineering in Medicine and Biology 27th Annual Conference. Shanghai: IEEE, 2005: 6631-6634.
[5] 冯天旭, 王智慧, 孙跃, 等. 采用三维偶极线圈的无线电能传输系统多自由度拾取机构[J]. 电力系统自动化, 2018, 42(23): 99-107.Feng Tian-xu, Wang Zhi-hui, Sun Yue, et al. Multi-degree-of-freedom Pick-up Mechanism of Wireless Power Transfer System Using Three-dimensional Dipole Coils[J]. Automation of Electric Power System, 2018, 42(23): 99-107.
[6] Nilsson J, Riedel S. Electric Circuits[M]. 10th ed. Upper Saddle River, NJ: Prentice-Hall, 2013: 729-736.
[7] 牛王强. 水下无线电能传输研究进展[J]. 南京信息工程大学学报(自然科学版), 2017, 9(1): 46-53.Niu Wang-qiang. The State of the Art of Underwater Wireless Power Transfer[J]. Journal of Nanjing University of Information Science and Technology(Natural Science Edition), 2017, 9(1) : 46-53.
[8] Song Y, Zhang Y, Zhang K, et al. A Rotation-Free Wireless Power Transfer System With Stable Output Power and Efficiency for Autonomous Underwater Vehicles[J]. IEEE Transactions on Power Electronics, 2019, 34(5): 4005-4008.
[9] Bana V, Kerber M, Anderson G, et al. Underwater Wireless Power Transfer for Maritime Applications[C]//2015 IEEE Wireless Power Transfer Conference(WPTC). Boulder, CO: IEEE, 2015: 1-4.
[10] Santos H M, Pereira M R, Pessoa L M, et al. Design and Optimization of Air Core Spiral Resonators for Magnetic Coupling Wireless Power Transfer on Seawater[C]//2016 IEEE Wireless Power Transfer Conference(WPTC). Aveiro: IEEE, 2016: 1-4.
AUV Wireless Charging System with Improved Coil Structure
LIURun-peng, YANGJin-min
(School of Electric Power, South China University of Technology, Guangzhou 510640, China)
By applying wireless charging technology, the autonomous undersea vehicle (AUV) can be made into a fully enclosed structure to avoid corrosion in seawater and eliminate the risk of leakage of electricity. In order to solve the electromagnetic interference problem that may exist in the AUV wireless charging process and optimize the coil structure, an AUV wireless charging system with improved coil structure is designed, which can be used in AUV charging device. Simulation results in ANSYS MAXWELL show that the proposed coil structure can make the coupled magnetic field mainly distributed in the vicinity of the AUV casing, minimizing the influence on the internal components of the AUV, and maintaining the mutual inductance stability even when the rotational offset occurs. Experimental results show that the output voltage fluctuation of the built-in wireless charging device is less than 10% in the condition of rotational offset, and the efficiency is about 70% for transmitting 40 W of electric energy.
autonomous undersea vehicle(AUV); wireless charging; electromagnetic interference; coil
TJ630.32; TN973
A
2096-3920(2020)03-0323-07
10.11993/j.issn.2096-3920.2020.03.013
2019-10-10;
2019-11-03.
国家自然科学基金项目(51177050).
刘润鹏(1996-), 男, 在读硕士, 主要研究方向为无线电能传输.
刘润鹏, 杨金明. 一种改进线圈结构的AUV无线充电系统[J]. 水下无人系统学报, 2020, 28(3): 323-329.
(责任编辑: 许 妍)
猜你喜欢
故事作文·低年级(2023年11期)2023-12-05 06:39:56
故事作文·低年级(2023年12期)2023-03-24 14:16:52
中学生数理化·中考版(2021年10期)2021-11-22 07:26:40
电力系统自动化(2021年18期)2021-09-25 07:34:28
湖南电力(2021年2期)2021-05-08 06:31:18
中学物理·高中(2016年12期)2017-04-22 10:23:37
中国环境监察(2016年7期)2016-10-23 05:36:30
中国现当代社会文化访谈录(2016年0期)2016-09-26 08:46:23
通信电源技术(2016年1期)2016-04-16 04:57:26
通信电源技术(2016年5期)2016-03-22 01:09:37