基于DenseNet的无人汽车制动意图识别方法
2020-06-29 12:14
计算机测量与控制 2020年6期
(长安大学 信息工程学院,西安 710064)
0 引言
电子化操作性能的提高衍生出了无人汽车这一技术理念,然而无人汽车操作技术依旧处于萌芽阶段,对于汽车的制动掌控技术研究较少[1]。无人汽车制动意图内部数据由于识别深度增加,会出现过度膨胀现象,导致制动识别准确率下降,引发交通事故,为此,不少学者不断强化对无人汽车制动意图识别方法的研究力度[2]。
传统无人汽车制动意图识别方法选用较为先进的数据操作手段对数据进行集中化处理,不断提升系统的操作精准度,同时监控系统的操作方向以及操作力度,并加快完善速率,控制系统操作处于研究允许范围内,根据追踪的数据进行图像整合,增强系统数据操作的科学性[3]。但在研究过程中,忽视了对基础数据的完整性收集,导致数据的处理效果较差,无法满足系统的操作需求,且数据操作投入成本较高,不符合可持续发展的需要[4]。为此,针对上述问题,本文提出一种新式基于DenseNet的无人汽车制动意图识别方法对以上问题进行分析与解决[5]。
本文识别方法首先获取初始无人汽车制动意图数据,提升系统内部数据的可操作能力,在系统数据追踪的同时进行数据处理操作,增强数据的可操控性,优化系统内部结构,按照相应的结构参数进行数据查找,并集中存储系统所需数据,以收集的数据为标准进行无人汽车制动意图数据分析,研究数据间存在的基础关系,并不断加强关系数据的联系,整合关联数据,并将其进行分类操作,将属于同一类别的关联数据进行集合划分,由此提高研究系统对数据的精准处理性能,最后,利用研究数据进行精确识别,根据不同的图像状态查找图像存储位置,同时简便操作程序,获取较为精简的操作步骤,达到对无人汽车制动意图识别的研究目的[6]。
该识别方法能够在一定程度上实现对初始数据的精准处理,简便操作步骤,缩减实验所需时间,节约成本,具备较为广阔的发展前景[7]。
1 无人汽车制动意图内部数据获取
图1 内部数据交流图
在实现数据间的交流后,对数据进行初步整合,将制动意图数据进行初始采集操作,并过滤数据,将与数据信息不符的数据进行滤除操作,由此确保数据的纯洁度,保证系统处理数据处于系统允许操作范围内。加大对系统的检测力度,对不符合系统发展需求的系统元件进行改良操作,直至元件符合系统运行原理[9]。对完成改造的元件进行二次调整,根据系统内部的结构与数据流动方向进行数据标准划分,改进数据信息,并综合数据传导方式进行数据传导,将收集的数据存储至同一存储空间中,对存储空间外的结构进行组装式处理[10]。
精简空间结构,由此扩展数据流通同道,优化数据的流通方式,对数据进行参数标定处理,并研究标定数据与基础数据间存在的差异,研究差异的大小,将差异过大的数据进行隔离,并分解出差异较小的参数进行数据混合操作,对于驾驶意图的下坡辅助控制方式进行查找,并按照标准查找的显示结果进行数据比对。结合电池保护模型对汽车运行过程的能耗进行分解,由此获取相应的制动操作所需能耗数量,在制动过程中注重对驾驶方向的动态调整,并进行分配策略整合操作,在低能耗的条件下控制制动数据处于系统收集要求下,同时将制动意图与理论意图分离,操控下坡路段的制动意图,设置数据操控如图2所示。
图2 数据操控图
在实现对数据的初始操控后,完成对制动意图数据的获取,并进行下一步骤的研究操作[11]。
2 无人汽车制动意图识别数据整合
以收集的初始数据为标准,进行无人汽车制动意图识别数据分析,将整合的数据进行拆分,同时进一步完善系统对下坡路段的驾驶员心理分析性能,将分析的数据安装至无人汽车自动系统中,提出数据内部处理机制,并按照相应的机制准则进行数据掌控与监测,对制动意图进行能量管理,强化管理性能[12]。设计数据管理如图3所示。
图3 数据管理图
在图3中,加深系统对制动意图数据的了解,并进行识别数据的分析操作。对制动过程中的舒适度与安全度进行考虑,并设置考虑公式如下:
(1)
式中,K为考虑参数,m为制动因素,n为整体数据数量,G为辅助参数,利用上述公式进行数据考虑,强化数据与系统内部功能间的联系,进而提升系统操作速度,增强操作的可行性。将制动意图分为常规制动意图与滑行制动意图俩类,按照制动特点进行标记,在实现整体标记后,依照制动的处理准则进行原则性划分,同时对汽车车速以及制动踏板位移进行测量,在测量过程中注意不断观察测量数据间的联系,对信号特征进行排除,加大对制动信号的管理力度,由此得到最佳的制动意图识别数据[13]。
虚拟人体解剖系统采用3Dmax建立骨骼模型,通过Uni⁃ty3D融合,建立了完整清晰的模型,此模型将用于AR/VR和疾病查询诊断功能。当启用疾病查询诊断时,通过疾病知识库的过滤,返回用户相关疾病的致病原因和治疗方法等信息。虚拟人体解剖系统功能实现如图1所示。
由于在实际汽车制动过程中,汽车轮胎会与地面产生一定的摩擦附着力,为此,在制动数据测量时需进行多次测量,以避免偶然性,同时加大对制动踏板位移距离的精准测量力度,减少位置误差对实验研究带来的影响,根据制动踏板深度对无人汽车进行踏板力度预估,并将预估数据进行整合,设置整合公式:
(2)
式中,J代表整合参数,L代表预估值,P代表实际参数值,a表示内部操作系统整合参数[14]。在实现上述系统操作后,对制动意图识别数据进行二次分析,如图4所示。
图4 数据二次分析图
在经过对数据的二次分析后,得到最终的意图分析数据。
3 基于DenseNet的无人汽车制动意图识别
DenseNet(稠密卷积网络)每个层直接访问来自损失函数和原始输入信号的梯度,带来了隐式深度监控,引入了具有相同特征映射大小的任意两个层之间的直接连接。为了改变特征映射大小的下采样层,将网络划分为多个紧密连接的密集块;将块之间的层称为过渡层,它执行卷积和合并。实验中使用的过渡层由批量归一化层和1×1卷积层以及2×2平均池化层组成。深度DenseNet结构如图5所示。
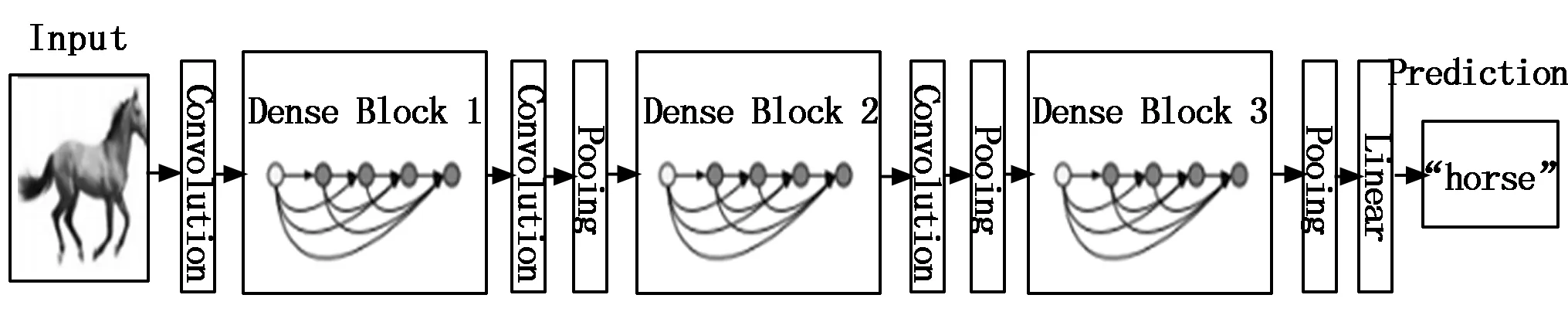
图5 DenseNet结构图
假设输入图像x0,设网络包括L层,每一层都实现了一个非线性变换Hi(·),其中i表示第i层,Hi(·)表示一个组合操作,将第i层的输出记作xi。
第i层得到了之间所有层的特征映射x0,x1,...,xi-1作为输入:
xi=Hi([x0,x1,...,xi-1])
(3)
式中,[x0,x1,...,xi-1]表示特征映射的级联。
在实现对无人汽车制动意图识别数据的映射分析后,根据不同的数据处理类型进行识别方案选择。在车辆行驶的过程中,由于无人汽车判断性能较弱,需在操作过程中注重系统的整体安全性,并不断查找安全参数进行综合分析[15]。对于清晰度较差的位置数据进行模糊度推理,利用数学边界算法优化系统结构,设置数据结构优化如图6所示。
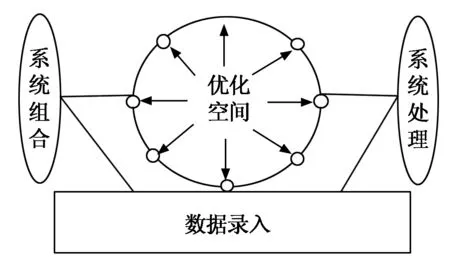
图6 数据结构优化图
在实现对数据结构的优化后,分别管理不同的制动信息,并保留系统中心信息,对数据输入量以及输入原因进行管理,同时查找其隶属度函数,对隶属度进行整理,查找隶属度相关信息,由此获取标准的处理参数数据。结合神经网络进行数据操作,挖掘系统数据内部的关联点,并设置数据点追踪系统进行数据点的实时监控操作。
对数据间的隐含层进行网络划分,对于数据输出量进行精准赋值操作,对数据间的非线性映射关系进行设置,同时排除干扰数据的存在,对意图的特征参数进行标定,设置参数标定如图7所示。
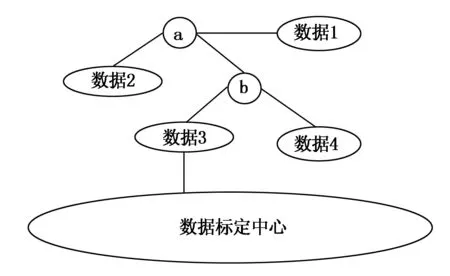
图7 参数标定图
在图7中,强化内部数据标定力度,防止数据的泄露,对算法进行加强训练操作,调控制动意图的制动速度,并利用训练后的算法参数对意图进行识别,将识别后的对照关系进行调换,改变路面附着条件,优化系统操作环境,避免无关因素的影响。对人工客观参数进行查找,分配不同的查找法则,定义制动意图识别输入量,并分析输入量信息,在完善信息的基础上实施比例划分操作,由此提升整体系统的识别性能,确保数据的独立操作,完成对无人汽车制动意图的识别研究。
4 实验与研究
4.1 实验目的
为了检测基于DenseNet的无人汽车制动意图识别方法的识别效果,与传统无人汽车制动意图识别方法的识别效果进行对比,并分析实验结果。
4.2 实验参数设置
针对无人汽车制造的特殊性,以及制动意图识别方法研究的操作复杂性,需对其进行实验参数和环境的设置,实验参数如表1所示。
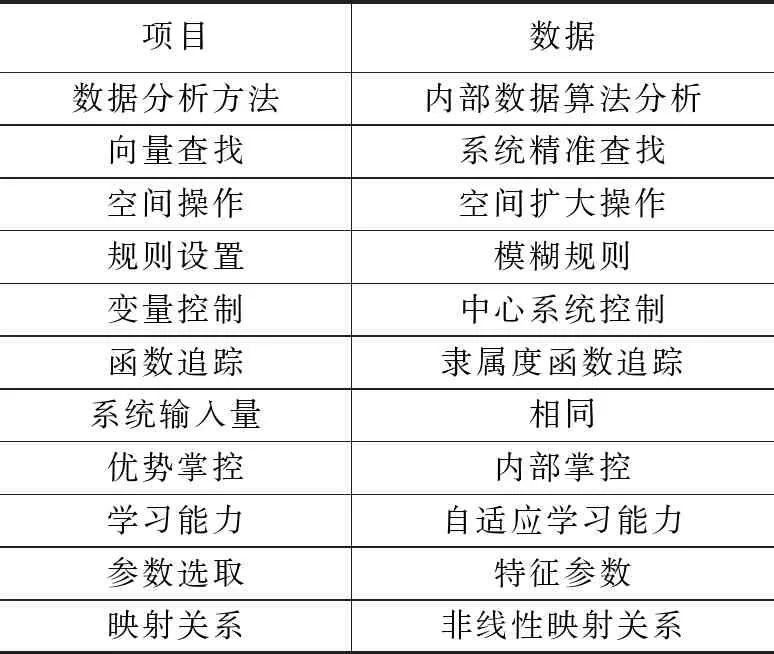
表1 实验参数
4.3 实验结果与分析
根据上述实验参数进行实验对比,将基于DenseNet的无人汽车制动意图识别方法的识别效果,与传统的识别效果进行比较,得到的制动意图数据收集完整度对比以及识别准确率对比分别如图8和图9所示。
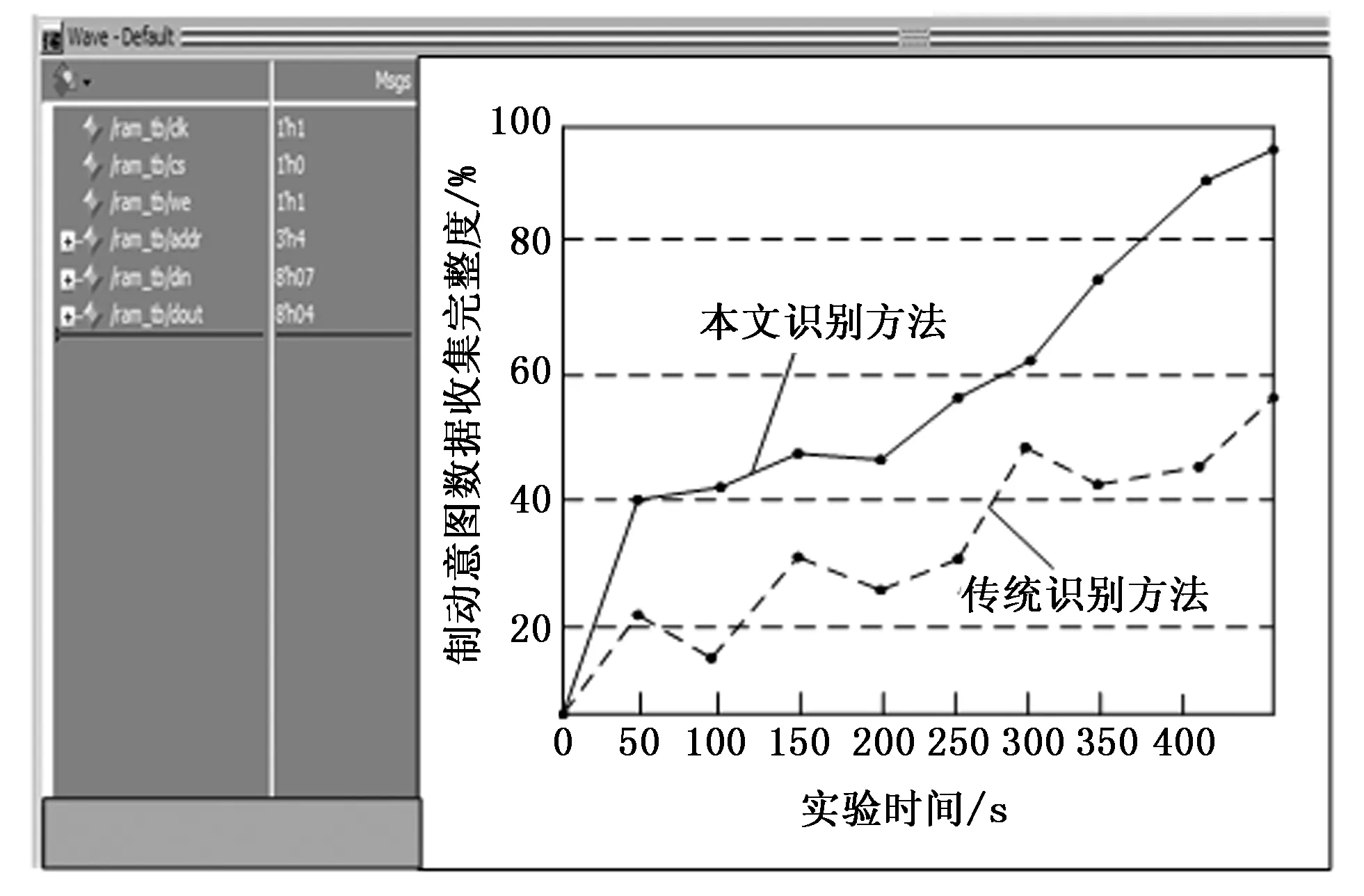
图8 制动意图数据收集完整度对比图
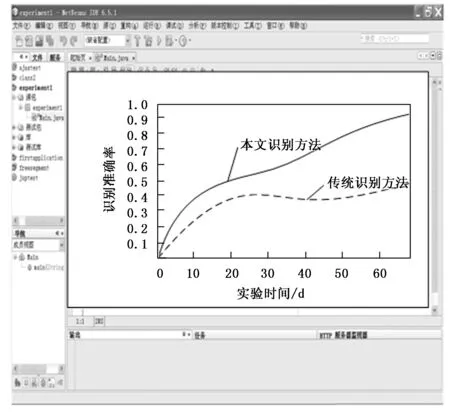
图9 识别准确率对比图
对比图9可知,在相同的参数条件下,本文识别方法的识别准确率较高,传统识别方法的识别准确率较低,造成此种差异的主要原因在于,本文识别方法在操作过程中进行无人汽车制动意图数据获取,获得较为完整的初始操作数据,并在数据操作的同时对数据的内部关系进行查找与分析,主动建立与数据相关的数据关联点,并分析内部关联点的属性,将属于同一属性的数据点进行点集划分,并存储至相同的数据集合中,按照内部调节机制进行系统调节,探索中间参数的存在条件,并构造相应的数据连接线,进行数据中心的实时连接操作,防止数据的外泄,保证数据处于较为安全的系统操作状态中。完善系统操作准则,并规定较为标准的数据处理模式法则对数据进行集中管控,保持数据流通的一致性,不断优化中心处理机制,在实现对数据的标准处理的前提下进行数据筛选,由此将无关数据过滤,保持操作数据的纯洁度,达到对初始数据处理的目的,进而增强数据的处理效果,获取完整度较高的制动意图数据。
对比图9可知,在实验时间为10 d时,本文基于DenseNet的无人汽车制动意图识别方法的识别准确率为0.4,传统无人汽车制动意图识别方法的识别准确率为0.2,在实验时间为20 d时,本文基于DenseNet的无人汽车制动意图识别方法的识别准确率为0.48,传统无人汽车制动意图识别方法的识别准确率为0.38。
由于本文对无人汽车制动意图识别数据进行精准分析,掌握内部数据结构,并根据结构进行数据调整,集中强化对标准数据的操作力度,选取操作性较强的数据进行系统操作,减少不必要的操作浪费,缩减操作所需时间,加强系统理论性功能,用实时较为精确的数据追踪方法进行数据向量查找,为数据的内部操作提供良好的数据基础,并在规定的操作时间内提高系统运行效率,增强内部识别的有效率,并辅助系统自主维护性能,提高系统的自我修复力度,完成对数据的基础识别操作,提升主系统识别能力,进而获得较高的识别准确率,而传统研究方法缺少此步骤的研究,对于收集数据的初始处理效果较差,得到的识别准确率较低。
随着实验时间的不断增加,本文基于DenseNet的无人汽车制动意图识别方法的识别准确率也不断提升,且一直位于传统识别方法之上。除以上原因外,本文选用不同的操作模式对过滤后的数据进行识别,按照数据点识别顺序进行排序,优化操作步骤,简便操作方式,降低系统的操作困难程度,由此提高系统操作的效率,并为后续操作提供较为完整的操作方案,在调节系统操作的同时整合识别信息,破除了外界因素的影响,识别的结果较为完整,促使识别的准确率较高。
经过以上对比分析可知,本文基于DenseNet的无人汽车制动意图识别方法的制动意图数据收集完整度以及识别准确率均高于传统识别方法,能够更好地提升系统的操作性能,为后续研究的开展打下夯实的基础,更好地为使用者所使用。
5 结束语
本文在传统识别方法的基础上提出了一种新式基于DenseNet的无人汽车制动意图识别方法,该识别方法的识别效果明显优于传统识别方法。
本文对无人汽车制动意图的识别分为3个步骤进行,首先对无人汽车制动意图内部数据进行获取,随机控制数据的流转方向,并在数据监测同时进行数据管理,不断控制数据的内部存储方式,确保数据的存储安全,以此获取较为完整的收集数据,在收集的数据的基础上进行识别数据分析,按照不同的识别数据进行数据点对照组合操作,不断优化数据点间的操作联系,在获得较为良好的数据内部连接信息的过程中对数据位置进行系统固定操作,时刻监控数据的流动位置,防止内部数据过度膨胀,最后,选取相应的识别方案对数据进行最终识别,不断提升系统的操作力度,加强理论操作,实现对无人汽车制动意图的识别。
相较于传统识别方法,本文基于DenseNet的无人汽车制动意图识别方法能够在较高程度上优化系统信息,不断更新系统数据,保持系统内部的先进性,获取准确率较高的操作数据,具备较佳的研究空间。
猜你喜欢
法律方法(2022年2期)2022-10-20
汽车实用技术(2022年14期)2022-07-30
福建基础教育研究(2022年4期)2022-05-16
健康之家(2021年19期)2021-05-23
健康之家(2021年19期)2021-05-23
医学食疗与健康(2021年27期)2021-05-13
军民两用技术与产品(2021年2期)2021-04-13
健康体检与管理(2021年10期)2021-01-03
小哥白尼·趣味科学画报(2019年12期)2019-02-28
岷峨诗稿(2017年4期)2017-04-20