
基于三维激光扫描点云数据的水库大坝监测技术研究与应用
2020-06-28 02:14柳红凯朱从军徐晓
大众科学·下旬 2020年7期
柳红凯 朱从军 徐晓


摘 要:由于施工技术、地形地貌且非刚性等特点土石坝容易产生非线性变化的特征,传统检测中一般采用大坝体上设置固定一些基准点的单点检测方式,通过拟合的方式预测坝体是否变形,坝体监测本身属于整体且呈现面状的监测,单点式检测具有一定局限性。本文提出了一种基于三维激光扫描技术的土石坝变形监测方法,将不同时间段所采集的三维点云数据在进行整体面状空间对比分析,监测大坝在整个空间绝对位置的变化。本方法在广州市黄龙带水库进行了试验,结果表明所提方法整体性强、精度高,能够满足水库大坝变形分析计算的要求。
关键词:三维激光扫描;点云数据;对比分析;变形监测
1.研究介绍
1.1研究背景
截止到2018年,据统计中国存在的大坝总数多余10万多个,我国当前属于当之无愧的坝工大国,大坝总数高居世界首位,远远高于世界其他国家。大坝通过拦蓄水资源进而合理分配水资源起到至关重要的作用,对国计民生、社會发展也起着举足轻重的地位。然而,由于施工技术、气候因素、地形地貌、水位影响以及坝体使用年限等多方面的原因,我国又成为大坝安全事故较多的国家,据统计目前国内已经发生大坝崩塌事故近3000多座,而近90%的坝体事故又出现在三十米以上的大坝,对国民生计、社会安全带来巨大潜在威胁。因此,对大坝安全监测,确保大坝时刻安全运营具有非常重要的意义。大坝安全监测本身是水利水电非常重要的研究课题,更是众多学科交汇点,尤其是测绘科学安全监测技术中激光雷达技术的全面推广对大坝的安全监测能起到安全、积极的作用。
1.2国内外研究现状
国外对土石坝的安全监测可以追溯到十九世纪九十年代[1-2],由德国率先进行坝体水平方向位置偏移量评估坝体位移,紧接着1903年美国从温度变化检测重力坝安全检测,1908年澳洲对拱坝变形观测,这也是世界上最早开展变形观测的实验。随后,美国在1925年、1926年开展了扬压力观测和史蒂文森山区的实验拱坝开展了应力应变监测。接下来世界各国相继开展了大坝安全监测,大坝安全监测的对象也逐渐的完善,己从初期的仅仅对大坝主体结构进行监测拓展到对大坝主体结构、坝基、坝肩、坝区及周边环境相关设施等全方位、大范围的监测。而后大坝由原来粗犷的方式向精细化检测逐步延伸,截止目前多家机构或个人已经开展使用高精密仪器通过精细建模、安全评估、风险预测等众多手段进行大坝安全监测。主要监测内容包括水位监测、位移监测、沉降监测及周围环境监测等。
我国针对土石坝的安全监测起步较晚[3-9],且趋向于通过统计分析定性分析为主要手段,为了进一步提高大坝监测,国内一些学者开始使用现代新型测绘手段监测大坝安全,其中三维激光扫描技术就是其中手段之一,通过点云扫描由传统手段点状监测到面状监测。使得监测手段更为立体化、全面化。
2.研究方法
2.1点云配准
在三维激光仪器扫描时,由于建筑物本身相互遮挡,被扫描物体在每一站扫描时存在扫描盲区,通常需要多次假设地面站才能将大坝本体扫描完整,尤其是较大建筑物更需要从多个角度进行扫描。经过多站扫描点云数据需要经过拼接或者配准才能得到扫描对象完整的点云数据,多站点云数据的拼接技术是指通过相对定向的方法将不同视点获取的激光点云数据转换到统一的或者固定的坐标系统的过程。大坝变形监测属于精密工程监测范畴,混凝土坝在受到外力时形变量极小,而在对大坝扫描时,由于大坝形体结构,不可能一站将所有信息获取到,因此如何将多个测站的扫描数据精确拼接成了大坝变形分析的重点、难点之处。本文使用改进ICP算法进行点云多站之间的自动拼接,只要确保不同站之间的存在足够的重叠区,能提取同名特征即可。
2.2对比分析
本项目采用点到面形变量的模式监测大坝形变量,相比较于取剖面的监测模式,点到面形变量的监测模式,显得更加直观,更加全面。点到面形变量的模式即将一期参考点云数据建模,然后将二期、三期点云数据与其进行对比,得到点云中每个点相对于一期面的形变量,达到监测的目的。
3.技术路线
4.数据分析
4.1原始数据采集与可视化
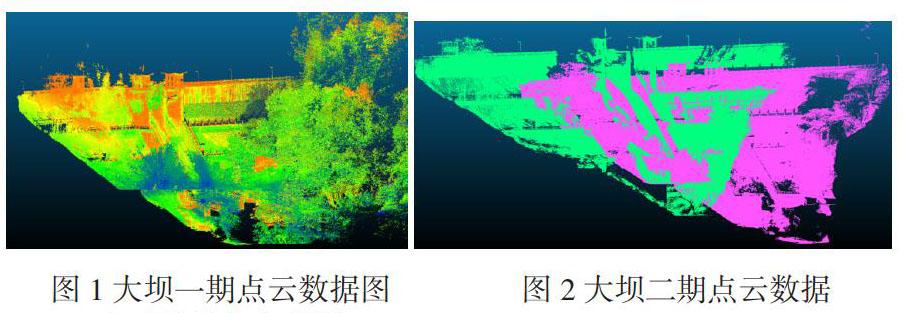
为了精确分析大坝变形形变量,本项目采用测量精度达到毫米级的高精度三维激光扫描仪对黄龙带水库大坝进行数据采集,扫描周期为每季度一次。大坝扫描原始数据如下所示:
4.2点云数据特点分析
依据图1、图2,点云数据中存在以下几个特点:
(1)包含大量噪声点(非坝体点),如树木,离群点等
(2)数据量过于庞大,冗余数据多。一期数据包含四千多万点云数据,二期数据包含千万点云数据。
(3)多测站之间存在数据偏移,采用自动配准处理
5.软件实现
为了验证本文算法的有效性,在VS2013平台上使用点云处理库PCL(Point Cloud Libaray)和 CloudCompare软件,进行程序设计开发。通过四叉树算法组织点云数据及CC软件开发提供接口进行程序可视化。通过构建三角网基于C2C算法进行点云数据差异化对比,可方便用于大坝点云数据的变形监测。
5.1软件界面
5.2软件介绍
1.点云重采样
每期大坝点云中包含数千万个点,点云数据包含的丰富空间数据原本是三维激光扫描相比较其他测量手段的巨大优势,但是有时候极大的数据量也造成后期数据处理的负担,因此,该功能是为了简化点云中的冗余数据,通过适当减小数据量,既不影响整体大坝模型,又能加快运算效率。
2.渐进加密三角网点云滤波
由于大坝四周环境较为复杂,扫描的点云数据中包含了高矮不同的树木、碎石、低矮植被等各种空间物体。在对大坝建模时需先将大坝之外的点云数据剔除。
3.點云配准
如上图所示,多个测站点云数据间存在点云数据移位现象,在进行点云数据对比前,应先将点云数据配准,本项目使用特征点配准算法。
4.模型重建
使用快速三角化法对大坝模型重建。
6.结果分析
本项目的数据来源于黄龙带水库大坝点云数据,基于不同时段点云数据进行大坝变形监测分析。本次分别选取大坝枯水期两次扫描数据,并将第一期扫描数据作为参考点云数据,第二期的点云数据与第一期数据进行对比分析。每期完整的大坝点云数据所采集的都在六千万个以上,确保大坝数据的完整性。
1.将密集点云数据抽稀,得到一个既能展示大坝外形,经两次数据对比分析, 如上图1、2所示
2.使用本文算法进行两期点云数据对比分析如图3所示
7.结论
坝体结构相对稳定,属于安全运营阶段,算法后期系从断面分析局部重点区分析等策略使激光雷达数据应用于大坝变形监测手段更加完善。
参考文献
[1]Axelesson P.DEM From Laser Scanner Data Using Adaptive TIN Models[J].Archives of Photogrammetry and Remote Sensing, 2000,XXXIII(B4/1):110-117.
[2]Sithole G, Vosselman G. Filtering of Airborne Laser Scanner Data Based on Segmented Point
[3]李清泉,李必军,陈静.激光雷达测量技术及其应用研究[L].武汉测绘科技大学学报,2000, 25(5): 387-392
[4]郭佳. 机载LiDAR点云数据滤波及建筑物提取技术研究[D].长安大学,2014.
[5]高志国. 地面三维激光扫描数据处理及建模研究[D].长安大学,2010.
[6]王思维. 基于分割的机载LiDAR点云数据滤波获取DTM方法研究[D].成都理工大学,2014.
[7]李炼. 机载LiDAR点云滤波及分类算法研究[D].成都理工大学,2014.
[8]杨应,苏国中,周梅. 茂密植被区域LiDAR点云数据滤波方法研究[J]. 遥感信息,2010,06:9-13.
[9]王勇. 地面激光扫描数据滤波研究[D].解放军信息工程大学,2012.
猜你喜欢
中国科技纵横(2017年3期)2017-03-29
读与写·教育教学版(2017年1期)2017-02-05
建筑建材装饰(2016年12期)2017-01-19
中国市场(2016年38期)2016-11-15
中小企业管理与科技·上旬刊(2016年10期)2016-11-15
青年文学家(2016年27期)2016-11-02
科技视界(2016年4期)2016-02-22
科技视界(2015年25期)2015-09-01
绿色科技(2015年6期)2015-08-05
