一种登高装置的结构特性研究
2020-06-28 14:20谭敏戈姬晓成刘红苗贺云龙何睿滢
科学技术创新 2020年16期
何 宇 王 鑫 寇 玺 王 栋 李 阳 谭敏戈 姬晓成 刘红苗 贺云龙 何睿滢
(国网陕西省电力公司检修公司,陕西 西安710065)
由于我国资源分布不均,电能的传输必须依靠特高压输电线路。因输电线路一般都存在运行距离长跨越大,且其经过的自然地形条件种类繁多,杆塔、金具与附属设施长期隐蔽暴露在野外,因受到恶劣的自然环境及电网本身长期持续的机械张力、电气线路闪络、材料结构老化的各种因素影响而对线路产生的断股、磨损、腐蚀等的损伤,必须及时进行巡视及检查和修复。因此必须对各条输电线路进行定期的巡视进行检查, 随时掌握和了解各条输电线路的安全性和运行情况, 线路所受周围环境的气候变化影响情况,以便及时发现和消除隐患,预防了事故的再次发生,确保线路供电安全。
特高压输电线路由于高电压等级以及高程大的杆塔,运维检修人员登塔不仅费时而且费力,且存在触电、坠落等安全隐患。而防坠落轨道是目前超高压杆塔在杆塔组立时,为防止登塔人员意外坠落而沿塔腿设置的一种T 型钢轨道。目前其作用仅为为登塔人员悬挂安全绳,加设一道保护,实现安全闭环保护,但仍不能减轻操作人员的工作强度,且存在工作人员杆塔攀爬过程中易在轨道上卡死等问题。
1 机器人的方案与结构
1.1 机器人概述。根据特高压输电线路防坠轨道的结构特征,以及巡线任务的要求,通过多种方案的可行性研究以及讨论商量,对原型机进行大量试验,不断改进结构与控制方案,最终完成了由行走装置、联接支架、动力系统、直流供电系统等组成的登高装置的设计,其行走装置采用橡胶皮带底盘结构、蜘蛛臂式的支撑结构、双副剪叉臂多处铰接点的过约束配合剪叉臂等。该装置整体结构简单可靠,泛用性强,并可实现远端遥控自行走。
1.2 工作原理。运用机器人视觉技术和遥感控制的途径,最终登高装置能够沿着防坠轨道完成爬塔任务,通过本体所携带的可见光以及红外摄像云台对线路周围环境进行数据记录以及传输,最终完成输电线路的巡检工作。该装置对输电杆塔巡视的内容有:能跨越防坠轨道与横担上的障碍物,实现在输电杆塔的防坠轨道上完成竖直、水平以及转弯等动作,直达工作任务地点进行下一步巡检任务。
如图1 所示,由于地貌的复杂性,输电杆塔都具有一定坡度,因此输电杆塔上的防坠轨道也具有一定坡度,并且防坠轨道上还存在转弯、连接器和小铁等各种阻碍,因此登高装置必须具有续航时间长、装置总重低、结构集成、工作灵活等特点,且需4~5 个自由度来实现各动作的完成,以完成预期的登塔及巡检的目标。
登高装置利用防坠落轨道的T 型钢结构,在防坠落轨道的T 型材上通过直流电机控制,实现在防坠落轨道上运动。为了简化装置的结构、减轻自重,同时其可以在防坠轨道上完成竖直、水平以及转弯等动作,行走装置设置2 个自由度,联接支架设计2 个自由度,合计4 个自由度。
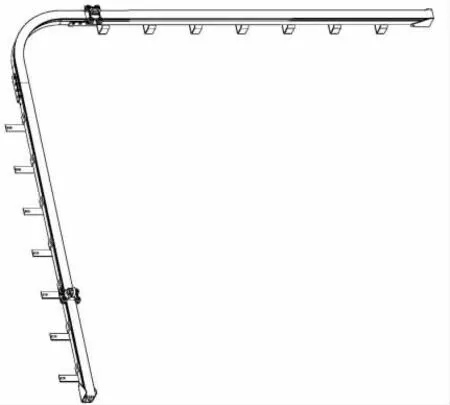
图1 机器人工作环境
电机驱动是登高装置的主要动力来源,它通过变速齿轮箱把动力传输到装置的各个齿轮以及曲柄连杆,实现机器人完成相应的动作。电机驱动是目前世界上应用最广泛的一种驱动方式,其主要分为直流伺服电机与步进电机两种不同的电机驱动模块。
2 登高装置的支撑研究
2.1 材料与通信模块选择。由于受到自身重力和负载的影响,从而会本装置实际到达的位置与预定的位置之间存在偏差,这样就会导致登高装置在防坠轨道上完成转弯动作后与实际轨道不匹配,从而导致无法进行下一步的工作任务等。基于计算式Δx=K×F 计算基于装置自重和负载引起的关节角变形,其中Δx 表示所述关节角变形,K 表示关节刚度,F 表示自重和负载。在考虑自重与机构转角精度等因素,根据登高装置在爬塔的过程中各实测位置对相关参数进行修正。综上所述,我们选用非金属绝缘复合材料来制作登高装置的机械结构部分,该材料符合相关标准,保证外界对装置的干扰尽可能降到最低,装置拥有全量程精度高、稳定性能强、一致性好、响应速度快等特点,最终机器人的设计自重为20KG。
本装置的无线发射接收电路主要利用nRF1024 与外围器件构成的电路组成,其主要部分是天线。简而言之,就是一个特定形状的导体,它可以将电流转化为射频能量并以电波形式发射出去,或将无线电波接收进来。任何一个无线系统都有天线,天线设计的好坏直接影响无线系统的收发能力。
本装置中的无线数据传输主要由无线数据收发器nRF1024、STC51 单片机和显示部分组成。nRF1024 收发器与单片机STC51 间通过SPI 口进行通信。nRF1024 采用FSK 调制解调技术,频道之间的转换时间小于650μs,且该模块集成度高,由一个完全集成的频率调制器、一个带解调器的接收器、一个功率放大器、一个晶体振荡器和一个调制器组成,工作频率稳定可靠,外围元器件少,不需外加声表滤波器。
2.2 机器人稳定攀爬条件。通过压紧使轮行走皮带与防坠轨道紧贴,实现登高装置抱紧防坠轨道以及在防坠轨道上完成下一步的动作,若装置本体不发生坠落、机身不发生倾覆,说明登高装置固紧在防坠轨道上了。接下来将对这两种情况进行力学分析。
2.2.1 装置本体不发生滑落条件。装置总重力为G,四个压紧轮的压力分别为Fp1、Fp2、Fp3、Fp4,压紧轮和防坠轨道上的静摩擦力分别为f1、f2、f3、f4,T 型侧面轨道对压紧轮的支持力分别为FN1、FN2、FN3、FN4。设压紧轮与轨道的摩擦系数为μ,列出的平衡方程为:

列出装置压紧轮与防坠轨道产生的静摩擦力与装置总重力的平衡方程为:

联合(1)式、(2)式,要使装置不发生坠落需满足:

2.2.2 装置本体不发生倾覆条件。防坠轨道的轨面与装置的质心之间存在一小段距离,所以登高装置在运动的过程中有倾覆的可能,要使得装置总体稳定,则应满足下列条件:

其中:h 为质心M 与轨面的垂直距离。将(4)变形,可知FP1需满足:

3 结论
登高装置由行走装置、联接支架、动力系统、直流供电系统等组成,整体结构简单可靠,泛用性强,可设备端遥控自行走,在特殊恶劣天气情况下不需要人员再登塔检查作业,不仅能够实现快速提高检修效率,还可以大大提升检修工作的安全可靠性。利用目前特高压输电线路已加装的防坠落轨道,在恶劣天气下仍可完成检测任务,降低了人员登塔的风险隐患,极大的减轻运维检修人员对杆塔的运行巡视工作、及时发现隐患和缺陷位置,实现对智能电网输电线路信息化、现代化的科学管理。
猜你喜欢
卫星应用(2022年1期)2022-03-09
空间科学学报(2020年6期)2020-07-21
空间科学学报(2020年6期)2020-01-08
环球时报(2019-12-05)2019-12-05
建材发展导向(2019年5期)2019-09-09
电子制作(2019年11期)2019-07-04
电子制作(2018年10期)2018-08-04
电子制作(2018年12期)2018-08-01
山东工业技术(2016年15期)2016-12-01
太空探索(2014年4期)2014-07-19