一种振动式水果采摘机械臂设计
2020-06-28 14:20王顺沩刘华雷徐添翼金一峰李乾寅常熟理工学院江苏常熟215500
科学技术创新 2020年16期
王顺沩 刘华雷 徐添翼 金一峰 李乾寅 张 凯(常熟理工学院,江苏 常熟215500)
1 概述
我国是水果生产大国,水果是很多地区农村经济发展的支柱性产业。但是我国水果采摘机械化水平还处于起步阶段。据统计,在水果生产作业中,收获采摘需投入的劳动力占整种植过程的50%~70%[1]。现如今市场上充斥着多种多样的水果采摘装置,国内市场上大多水果采摘装置都是小型纯机械结构,在采摘收集水果时还是需要大量劳动力,效率极低。
在国外果园大都在平原地区,因此以大型机械化生产为主。机械振动采摘机又可分为:机械推摇和机械撞击两种[2]。推摇式采摘器是通过振动器使果树发生振动,从而使水果与果蒂发生分离。撞击式是通过撞击果树使果实掉落。采用机械化采收不仅能减轻人们的劳动强度、节省人工成本、提高作业效率,而且能提高水果的经济效益[3]。欧美等国外发达国家农业以大农场为主,采用振动式采摘机械较多。振动式采摘机械,现有结构原理所存在的缺点和不足之处:(1)需要人工操作机械臂,握住手把进而夹持树干;(2)水果坠落后,或者直接坠落到地上,或者用大布料接,操作不是很方便;(3)机械手长时间振动后,容易出现滑落现象。国内的水果采摘结构主要是刀片辅助人工采摘装置,升降采摘台装置等,与大型机械式采摘器相比,采摘效率较低。随着我国逐渐进入老龄化社会,劳动力成本的提高,并且严重不足,采摘果实成上升,严重制约了我国种植业的发展。本文设计了一种机械臂结构,不再需要人工扶持加紧树干,并且夹持更加紧固。另外,在机械臂上设计了水果收集装置,提高了采摘效率。
2 结构设计方案
图1 为机械臂整体结构,图中未画出固定于各个(转下页)连杆关节上的柔性帆布。此装置的运动功能主要有两个:第一,夹紧树干;第二,张开收集帆布。实现这两项功能的驱动器是电机2。该装置的工作程序如下:首先,电机带动与联轴器3 相连接的蜗杆。当蜗杆驱动小齿轮17 时,带动阶梯轴18 转动,阶梯轴与夹持爪底座相配合,使左右两个夹持爪11 夹紧或者松开。在阶梯轴转动过程中,带动大齿轮的转动通过齿轮组6 使连杆组10 发生伸缩动作。当机械臂夹紧树干并且帆布张开后,振动器1 开启,使夹持爪11 所夹的树干进行振动,达到采摘果实的效果。下落的果实通过柔性帆布支撑起的伞状布兜进行收集,接着顺着布兜底下的孔洞经传输网道滚入收集框里,即完成一个采摘兼自动收集的工作流程。

图1 机械臂整体结构
3 关键部件设计及原理
图2 为夹持爪开合结构设计。夹持爪11 与机械臂底座通过阶梯轴18 相配合。当电机工作,蜗杆带动小齿轮17 转动。小齿轮与阶梯轴18 通过矩形销16 相配合,阶梯轴带动其左右开合,实现夹紧和松开树干的运动效果。
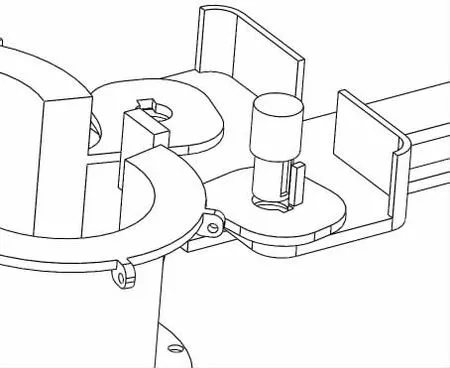
图2 夹持爪开合结构
图3 为齿轮组及夹持爪结构图。图3a 中,蜗杆带动小齿轮17 转动,小齿轮与阶梯轴通过矩形销16 配合,继而带动夹持爪转动。在阶梯轴上半部分的另一个键槽与弧形销13 相配合,从而带动大齿轮运动。大齿轮带动一系列齿轮组使连杆逐渐张开或闭合。在设计结构时,夹持爪比被支撑起来的连杆先达到结构运动的最终点。该部分设计利用了扭力矩扳手原理。当夹持爪夹紧树干时,阻力超越矩形销的弹簧弹力,底座停止转动。此时,大齿轮继续转动,带动齿轮组将连杆逐渐抬起或落下。当被支撑起的连杆达到它终点时,此时丝杠齿轮螺母8 已到达丝杠顶端,完成连杆组的打开,不再往上端移动。由于矩形弹簧的作用,弧形销被压入矩形孔内,大齿轮不再转动。弹簧14 起到过载保护,当电机堵转过大,则会按压下去打滑,保护电机。图3b 中,每个夹持爪部分都有三组长齿轮9。长齿轮组驱动丝杠转动,从而带动丝杠螺母上下运动,两个丝杠螺母中间的装置与连杆组10 相连接。加入三组长齿轮组,目的是使每组丝杠螺母升降方向一致。
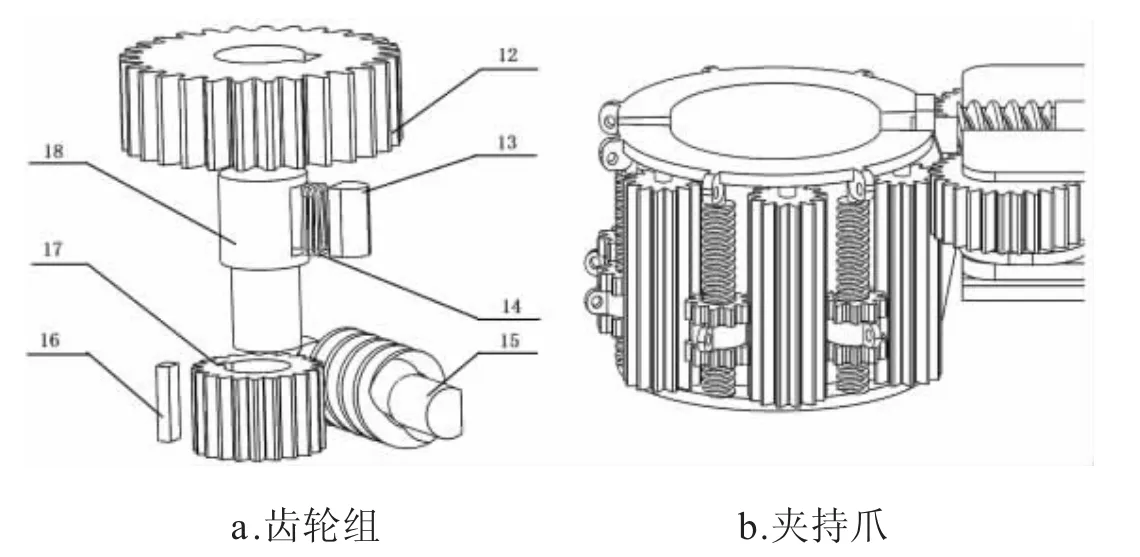
图3 齿轮组及夹持爪结构图
图4 为机械臂上的连杆组,由三组平行四边形机构组成。该部分设计模拟了雨伞张开和闭合的过程。当电机工作时,带动丝杠齿轮螺母8 向上或者向下运动,通过平行四边形的运动,使长杆伸出或收缩,即可实现收纳装置的展开或者收拢。
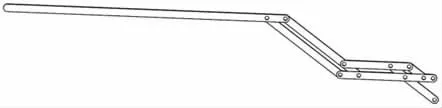
图4 连杆组结构
4 结论
本文以蜗轮蜗杆及齿轮为传动结构,设计出模仿雨伞张开收纳运动的机械手,以四杆机构为骨架,设计出一种水果收集装置。该装置不再需要人工扶持,可直接通过操纵杆控制其夹住树干和张开收集帆布的效果。本设计的目的是使机械臂振动采摘法的效率得到更大的提升,使采摘及收集一体化,操作更加的方便,再者极大缩小采摘装置所占的空间体积。振动式水果采摘器结构简单,可以用于采摘苹果、梨、柿子等大而密集的水果,采摘效率高,工作方便,对树干及果实的损伤小。
猜你喜欢
机床与液压(2022年8期)2022-09-19
石油矿场机械(2022年3期)2022-06-17
商品与质量(2020年48期)2020-11-26
汽车实用技术(2020年4期)2020-04-10
少儿科学周刊·少年版(2020年9期)2020-03-04
汽车实用技术(2017年16期)2017-09-21
科技与创新(2014年14期)2014-09-17
知识就是力量(2014年1期)2014-02-21
科技致富向导(2013年18期)2013-10-31
汽车与新动力(2012年5期)2012-03-25