基于改进PID控制的汽车主动悬架系统研究
2020-06-28 09:38裴倩倩
中国新技术新产品 2020年8期
裴倩倩
(云南国土资源职业学院,云南 昆明 650000)
0 引言
汽车自诞生以来经历了一百多年的发展历史,随着生活水平的提高,人们对汽车的乘坐舒适性和行驶安全性的要求也越来越高,而对这2 个方面要求最高的是汽车的悬架系统。悬架系统是连接车身与车桥的一种传力装置,是汽车重要的组成部分,它由弹性元件、减振器和导向机构等部分组成[1]。在行驶的过程中,汽车悬架系统可以缓冲由于地面不平、转弯等引起的振动,提高乘客乘坐的舒适性,使车辆平稳的行驶。悬架系统一般分为被动悬架、主动悬架和半主动悬架3类[2]。被动悬架由固定系数的弹簧和阻尼器组成,它结构简单、成本低,但只能行驶在特定的路况下,一旦路况改变,减振性能就无法提高。为了满足消费者们对舒适性和安全性的要求,研究人员提出了主动悬架和半主动悬架,主动悬架和半主动悬架会根据汽车行驶的路况,对悬架的弹簧和阻尼器进行调整,使汽车始终保持最佳的行驶状态。其中,主动悬架接收来自多个传感器传送的车辆行驶信息,并采用事先设置好的控制策略进行判断,并将判断结果传送至作动器,由作动器输出相应阻尼力来抑制振动,使车辆平稳行驶,达到理想的减振效果。
该文以CarSim 软件中现有的车型(E 型SUV)为研究对象,主要从垂直、俯仰和侧倾方向分析主动悬架的性能,并与被动悬架进行比较。为了使主动悬架的性能更优,需要设计一个好的控制器。传统的PID 控制算法结构简单、成本低,但存在超调量、控制误差较大和稳定性差等问题[3]。为了解决以上问题,该文提出一种改进的PID 算法,将传统的PID算法与一阶低通滤波器进行复合控制,大大降低路面冲击对车辆的影响,并通过CarSim 与MATLAB/SIMULINK 的联合仿真,实现对悬架系统的有效控制。
1 悬架系统基于CarSim建模
汽车系统结构十分复杂,为了方便分析和设计,大多数研究者们选择简化后的二自由度、四自由度、七自由度车辆模型为研究对象,并在MATLAB 中进行建模,但是该类模型不能全面描述汽车悬架系统的性能,因此该文在CarSim 中建立整车模型。CarSim 是一款专门针对轿车、SUV、三轮车等十几种车型进行动力学仿真的软件,该软件中的车辆模型接近实际车况,且运算速度快、精度高、扩展性好,可与其他软件进行联合仿真,例如MATLAB、LabVIEW 等[4]。研究者们可以根据自己的需求对车辆尺寸、参数、轮胎、悬架、发动机等进行设置,还可以设置不同的路面信息来模拟真实的工况,然后采用开环或闭环控制(比如CarSim 与SIMULINK联合仿真)在线验证控制设计的有效性,最后通过3D 动画和响应曲线图显示仿真结果,为实际车辆的开发提供有效的数据,节约车辆研究的成本和时间。
为了验证控制策略的有效性,该文选择CarSim 中的E型SUV 作为研究对象,该车辆模型中定义了车辆的簧上质量为1 560 kg,定义了各个方向的转动惯量、质心高度、轴距、轮胎等数据。在CarSim 软件中悬架的模型有独立悬架、非独立悬架和扭转梁悬架,该文选择独立悬架,其由弹簧和阻尼器构成。其他对仿真结果影响不大的部分(如空气动力学系统、动力传动系统、转向系统、制动系统等)选择默认设置。首先在CarSim 中设置好输出变量:车身垂直加速度、侧倾角度、俯仰角度、路况等,设置好输入变量:4 个作动器的控制力,然后通过内置接口将整车模型数据导入MATLAB/SIMULINK 中,在MATLAB/SIMULINK 中设计改进的PID 控制器,最后将得到的4 个作动器的控制力再输入CarSim 中进行闭环联合仿真,实现对车辆的可控操作。
2 改进PID控制设计
PID(Proportion Integration Differentiation)控制,是目前常用的一种反馈控制策略,它结构简单、可靠性高、模式固定,对于复杂控制系统(比如车辆系统、温控系统等)有很强的适应性,且控制效果好。PID 控制由比例(P)、积分(I)、微分(D)3 个单元叠加得到控制力,输出的控制力再反馈给控制器,最终达到控制悬架系统的目的,PID 控制算法公式为[5]:

考虑到车辆突然制动等情况,悬架系统会输出低频高幅值尖峰脉冲,导致输出值误差较大,影响控制效果。为了解决该问题,在传统的PID 控制器中加入一个低通滤波器,使尖峰脉冲干扰不能通过,优化控制效果,具体控制框图如图1 所示。输入偏差e(t)经低通滤波器处理后得到E(t),表示为:

式中:K 为滤波系数。E(t)是时间为t时的采样值。E(t - 1)是上一时间的采样值。经低通滤波器处理后,E(t)作为新的偏差值输入PID 控制器中,该复合控制可以有效抑制干扰。

图1 改进的PID 复合控制原理图
在整车主动悬架系统控制过程中,分别以车身加速度、侧倾角加速度、俯仰角加速度为被控对象,将参考值与实际值的差值e(t)作为输入,传输到改进的PID 控制器中,进行低通滤波、比例、积分、微分的运算,最后将主动控制力u(t)输出给被控系统,达到改善悬架性能的目的。
3 汽车悬架系统仿真
3.1 路面模型设置
当汽车以一定速度在路面上行驶时,真实的路面情况是一个复杂多变的非线性信号,在MATLAB/SIMULINK 中无法准确的构建路面信息。CarSim 软件中的随机粗糙路面与车辆经常行驶的路况接近,因此,该文选用CarSim 中恒定摩擦系数为0.85、长度为1 200 m 的随机粗糙路面,并将路面信息输入MATLAB/SIMULINK 中。车辆以60 km/h 的速度在该路面上行驶,仿真时间设置为10 s。在车辆行驶过程中,由于前后轮轴距为2.95 m,所以后轮相较于前轮的路面输入有滞后,路况信息如图2 所示。
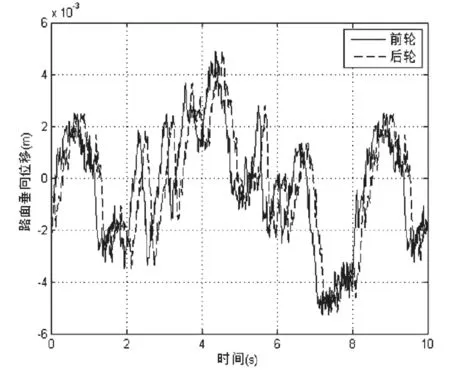
图2 随机粗糙路面输入
3.2 仿真结果与分析

图3 车身加速度、车身侧倾角度和俯仰角度响应曲线
为了验证改进的PID 控制器设计的可行性,该文在CarSim软件中建立整车模型和路面模型,在MATLAB/SIMULINK 中设计改进的PID 控制器,进行联合闭环仿真,并将仿真结果与被动悬架系统进行对比分析。图3 给出了整车模型的车身垂直加速度的仿真结果,从图中可以看出,与被动悬架相比,由改进的PID 控制的主动悬架系统可以明显降低车身的加速度,使车辆平稳的行驶,提高乘客乘坐舒适性。图3 给出了整车模型的车身俯仰角度和侧倾角度的响应曲线,与被动悬架相比,改进的PID 控制器可以有效抑制车身的俯仰、侧倾角度,保证车辆的操纵安全性。通常,悬架性能评价指标有车身加速度、轮胎动载荷、悬架动行程3 个,该文计算出了三者的均方根值,并列出表格进行对比,见表1。从表中可以看出,相比于被动悬架,改进的PID 控制下的3个性能指标中,车身加速度和悬架动行程的改善最为明显,降幅达50%左右。从表中可以看出,轮胎动载荷的波动范围很小,保证了轮胎与地面的不间断接触。综上所述,改进的PID 控制的效果达到了预期目标。

表1 改进的PID 控制下各性能评价指标的均方根值对比
4 结论
该文以整车模型为研究对象,在垂直、俯仰、侧倾3 个方向上设计了3 个改进的PID 控制器,并将控制器的输出重新分配到4 个作动器上,利用CarSim 和MATLAB/SIMULINK 2 个软件进行联合仿真研究。仿真结果表明,在相同的路况下,基于改进的PID 控制的主动悬架系统,在满足悬架的3 个评价指标的基础上,其性能明显优于被动悬架。
猜你喜欢
中国交通信息化(2023年1期)2023-03-18
世界汽车(2022年11期)2023-01-17
传媒评论(2018年11期)2018-02-16
北京汽车(2016年6期)2016-10-13
现代制造技术与装备(2015年4期)2015-12-23
中国交通信息化(2015年3期)2015-06-05
汽车维护与修理(2015年6期)2015-02-28
汽车维护与修理(2015年2期)2015-02-28
中国交通信息化(2014年7期)2014-06-05
汽车维护与修理(2014年10期)2014-02-28