
基于GPS的光电经纬仪动态测角精度校飞方法
2020-06-24 05:20刘勇韦国军闫龙
现代信息科技 2020年22期
关键词:无人机
刘勇 韦国军 闫龙


摘 要:光电经纬仪主要用于对目标的实况拍摄和定向测量,其动态测角精度直接影响着对目标交会定位的精准程度,参试前需要鉴定测角精度。根据测控要求和靶场实际条件,提出基于GPS作为鉴定标准的光电经纬仪动态测角精度校飞方法。试验结果表明设备跟踪稳定,测量数据平滑,动态测角精度满足设计指标,具备参试条件。从多次完成任务和数据处理结果看,该方法切实可行,可以对测角精度做出评价,为接收和拒收提供判断依据。
关键词:无人机;校飞;精度鉴定
中图分类号:TN98 文献标识码:A 文章编号:2096-4706(2020)22-0061-04
Method of Dynamic Angle Measurement Precision Inspection Flight for
Photoelectric Theodolite Based on GPS
LIU Yong,WEI Guojun,YAN Long
(PLA Strategic Support Force University of Aerospace Engineering,Beijing 101400,China)
Abstract:Photoelectric theodolite is mainly used for live shooting and orientation measurement of targets,and its dynamic angle measurement accuracy directly affects the accuracy of target intersection and positioning,so it is necessary to identify the angle measurement accuracy before the test. According to the requirements of measurement and control and the actual conditions of shooting range,a photoelectric theodolite dynamic angle accuracy inspection flight method based on GPS as the identification standard is proposed. The test results show that the tracking of the equipment is stable,the measurement data is smooth,the precision of dynamic angle measurement meets the design index,and it has the test condition. From the results of many tasks and data processing,the method is feasible,which can evaluate the accuracy of angle measurement and provide judgment basis for receiving and rejecting.
Keywords:UAV;inspection flight;accuracy evaluation
0 引 言
新技术武器装备试验任务意义大、试驗风险高,其中测控系统具有目标相对测控设备动态性能快、弹道测量精度要求严的特点。为了得到高精度弹道,本文以笔者参与的科研项目为支撑,基于大量的测试数据和实验分析,研究光电经纬仪精度鉴定、设备优化布站、目标航路规划、实时和事后交会定位算法研究等工作。由于单位测控技术发展相对较晚和力量薄弱,参试设备多为新研制或新改造的设备,作者最初着重研究光电经纬仪测角精度鉴定等工作。以往光电经纬仪精度鉴定主要通过有人驾驶飞机作为校飞平台,基准设备为高精度弹道相机(或电影经纬仪),该方法存在数据处理周期较长、弹道相机不能随动跟踪、视场相对较小(测量弧段较短,可用数据量较少)等局限性。
无人机技术的飞速发展和GPS差分定位精度的提高,使无人机挂载作为高精度GPS作为校飞平台和基准成为可能和趋势,该方法中,GPS和光电经纬仪同时测量目标位置、以GPS作为比较标准鉴定光电经纬仪动态测角精度,具有测试条件模拟逼真、数据比较快速直接、效费比高等优点。本文探讨了光电经纬仪动态测角精度鉴定系统组成、无人机航路规划、精度鉴定数据处理方法等,通过实际试验实现并确定了精度鉴定步骤,并分析了高精度GPS和无人机校飞平台用于光电经纬仪动态测角精度鉴定的可行性。
1 校飞系统组成
根据无人机的性能指标,选择一种合适的无人机,具有飞行平稳可靠、留有足够空间和电气接口、可根据用户不同需求加载不同任务设备等特点以满足校飞需要。在遴选曳光管、机载GPS、遥测发射机、电子罗盘、数据记录器等合作目标时,选取小型化、集成化,低价格的成熟产品,在不影响无人机整体配重平衡的情况下,集成各分系统,并做到整系统电磁兼容。
加装时,机载GNSS天线安装位置为机背,GNSS接收机、遥测发射机、电源模块安装于机舱,遥测天线安装于机腹位置。为了光电经纬仪观测方便,点光源合作目标安装于腹部,尽量缩短与GNSS天线在机体纵轴线方向上的距离,以减少跟踪点不一致的影响。在后续的数据处理中,GNSS天线位置坐标修正到点光源位置。
此时基于GPS的光电经纬仪动态测角精度校飞结构如图1所示。
2 航路设计
由于飞机飞行速度、高度、距离有限,光电设备的某些动态指标检测会受到一定限制,根据设备的主要技术指标,在GNSS事后测量精度为30 cm、比较标准设备的测量精度为被鉴定设备测量精度的3倍条件下,要求光电设备与飞机航线距离≥9.3 km。光电设备与飞机航线距离≥6.2 km,方可满足鉴定光电设备红外测角精度的要求。航线设计时重点考虑了以下几个方面因素:
(1)考虑设备布局,靶场地形、地貌等因素;
(2)确保在整个航路上能够对无人机进行无障碍遥控;
(3)试验航路最大限度地检测设备的性能与精度;
(4)飞行航道尽可能简单,在精度鉴定数据收集区选择直线航路,以便于航路保持;
(5)尽量模拟设备在实战中的跟踪状态。
3 测角精度鉴定方法研究
光电设备测得的是无人机以设备中心(三轴交点)为原点的垂线测量坐标系的坐标(A,E),而GNSS测量计算的结果则是WGS-84坐标系中的大地坐标,为此,在结果比对之前,必须进行坐标转换。将GNSS测量结果转换至光电设备点的垂线测量坐标系,求无人机在该坐标系中的GNSS标准值。
将GPS天线相位中心、光电经纬仪三轴中心大地坐标分别向地心空间直角坐标系转化:
其中,(L、B、H)为GPS天线相位中心的大地经、纬、高;(L0、B0、H0)为光电经纬仪三轴中心的大地经、纬、高;为GPS天线相位中心点的卯酉面曲率半径,为光电经纬仪三轴中心点的卯酉面曲率半径;a为地球长轴半径;e为地球第一偏心率。
建立机体坐标系。在飞机静态时,用全站仪测出曳光管喷口在机体坐标系中的位置:
其中,L径为曳光管相对飞机中心在机身方向的长度,r为曳光管长度,α为安装倾角。
根据电子罗盘测量的飞机俯仰角?、滚转角γ和偏航角κ,求出曳光管喷口在以GPS天线相位中心为原点的测量坐标系中坐标:
其中,Δγ=γ-γ1;γ1 。
曳光管噴口与GPS天线相位中心在地心空间直角坐标系下的相对位置:
其中,Bt、Lt为GPS在t时刻的经度、纬度。
那么曳光管喷口在地心空间直角坐标系下的坐标为:
校飞试验时,无人机目标成像较为对称,若无人机较小且飞行比较平稳,完全可以不加载曳光管和姿态测量装置。事先将GPS天线安装固定于机背中央位置,在GPS天线相位中心位置折算到曳光管喷口时,直接将GPS定位数据中高度参数项减去二分之一飞机厚度,即为曳光管喷口的准确定位数据:
其中,h为飞机厚度。
光电经纬仪测角数据是基于以设备三轴中心为原点的垂线测量坐标系。
将曳光管喷口航迹参数由地心空间直角坐标系转换到测站垂线测量坐标系,转换方程为:
其中,[xY yY zY]T为曳光管喷口在测站垂线测量坐标系内的坐标;G为地心空间直角坐标系与法线测量坐标系转换关系:
G1为法线测量坐标系与垂线测量坐标系的转换关系:
其中,γo=arcsin[sin(λo-Lo)sinφo];(Lo,Bo,
Ho)为测站原点的大地坐标,(λo,φo,ho)为测站原点天文坐标;(ξo,ηo)为垂线偏差在子午圈和卯酉圈上的分量。
计算出曳光管喷口在垂线测量坐标系下的标准值(AY,EY):
有了上述曳光管航迹在垂线测量坐标系下的标准值和光电经纬仪测量值,则可比对、统计光电经纬仪动态测角精度,比对前,已对光电经纬仪测量数据进行了预处理和大气折射误差修正工作。光电经纬仪动态测角误差为:
其中,N为参加校飞的无人机架次;M为每个架次中无人机航迹的采样点;ΔAij=Aij-AijY;ΔEij=Eij-EijY;Aij为第i架次中光电经纬仪测量第j个采样点的方位角;Eij为第i架次中光电经纬仪测量第j个采样点的俯仰角;AijY为第i架次曳光管航迹第j个采样点对应的方位角;EijY为第i架次曳光管航迹第j个采样点对应的俯仰角。
对于光电经纬仪测角精度的评判,一般常用系统误差和随机误差来衡量。系统误差是由测量设备的设计、加工与装调引入的误差以及零值不准、站址测量不准或外界条件变化等引起的,反映了测量值与真实值的偏离程度;随机误差是由测量设备内部热噪声、外界条件的扰动引起的,反映了在重复测量时,许多独立测量值之间的一致性程度,或者说代表测量值的离散程度。
在上述实施方案中,GPS定位精度的选取可根据被鉴定光电设备的精度设计指标而定,一般情况下,载波相位差分GPS系统即可;遥测系统采用全向天线小遥测系统即可;关于时间同步问题,除了采用内插方法外,还可采用GPS接收机为电子罗盘,提供时统信号实现同步;曳光管可采用可见光曳光管或红外曳光管,根据被鉴定光电经纬仪的相机而定。
4 试验结果分析
图2为根据以上航路设计原则设计出的实际航迹,途中设备到航迹的数据表示鉴定的最短距离,航迹上的距离表示鉴定段落。
通过试验验证航迹可以给五台光电设备进行精度鉴定。由此可知,通过合理的航迹设计,可以同时完成多台光电设备的精度鉴定,减少飞行次数,节省大量的人力物力。
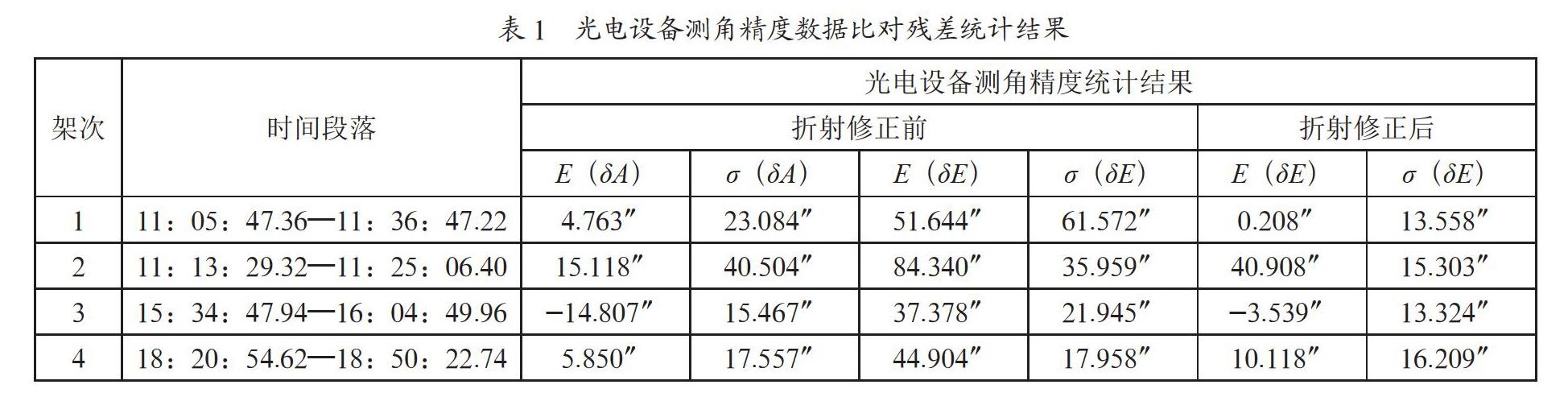
根据光电设备测量数据的比对统计结果如表1所示(统计径向距离大于3 km的段落),其中E(δA)、σ(δA)表示方位角的A比对残差的均值和总误差均方根值;E(δE)、σ(δE)表示俯仰角E比对残差的均值和总误差均方根值。
俯仰角经折射修正后测角精度在15″左右,方位角测角精度稍差为30″左右,有时会超过设计指标30″,考虑到选取的无人机目标较大,光学设备跟踪点和GPS安装点不一致,数据比对、统计时方位角测角精度有时偏大是正常的,在可接受的范围之内,光电设备精度满足设计指标与试验要求基本一致。
5 结 论
通过应用无人机作为校飞平台,采用以高精度GPS定位数据作为比较标准进行校飞。对多次试验得到的数据进行分析,所得光电经纬仪测角精度在设计指标之内,同时验证了无人机校飞的可行性,拓展了无人机在测控设备精度鉴定方面的应用。
参考文献:
[1] 夏南银.航天测控系统 [M].北京:国防工业出版社,2002.
[2] 中国人民解放军总装备部军事训练教材编辑工作委员会.外弹道测量数据处理 [M].北京:国防工业出版社,2002.
[3] 王小平,曹立明.遗传算法——理论、应用与软件实现 [M].西安:西安交通大学出版社,2002.
[4] 王秀峰,卢桂章.系统建模与辨识 [M].北京:电子工业出版社,2004.
[5] 毛英泰.误差理论与精度分析 [M].北京:国防工业出版社,1982.
[6] 费业泰.误差理论与数据处理 [M].北京:机械工业出版社,2004.
[7] 张守信.GPS卫星测量定位理论与应用 [M].长沙:国防科技大学出版社,1996.
[8] 刘丙申,刘春魁,杜海涛.靶场外测设备精度鉴定 [M].北京:国防工业出版社,2008:4-8.
[9] 马顺南,娄汉泉,刘秋辉.大型测控系统校飞航路设计方法 [J].导弹与航天运载技术,2007(5):55-57.
[10] 周巍,郝金明,徐兆磊,等.基于无人机平台的测控设备精度鉴定系统 [J],测绘通报,2013(6):16-18+44.
[11] 柴敏,胡绍林,张伟.靶场光电经纬仪跟踪精度评估技术 [J].飞行器测控学报,2013,32(5):403-407.
[12] 叶剑锋.光电经纬儀外场测角精度校准新方法 [J].四川兵工学报,2011,32(11):116-119.
作者简介:刘勇(1981—),男,汉族,山东郓城人,高级工程师,本科,研究方向:光电测量。
猜你喜欢
电脑知识与技术(2016年28期)2016-12-21
新教育时代·教师版(2016年27期)2016-12-06
农机使用与维修(2016年10期)2016-11-10
人间(2016年26期)2016-11-03
科技视界(2016年22期)2016-10-18
企业导报(2016年9期)2016-05-26
