集成BIM-3D扫描技术的斗拱建模方法
2020-06-24 03:51惠之瑶张爱琳闫泽文刘巧灵韩晓桐
土木工程与管理学报 2020年2期
惠之瑶, 张爱琳, 王 昆, 闫泽文, 刘巧灵, 韩晓桐
(1. 内蒙古科技大学 土木工程学院, 内蒙古 包头 014010; 2. 包头铁道职业技术学院 建筑工程系, 内蒙古 包头 014010; 3. 中国电力工程顾问集团华北电力设计院有限公司, 北京 100120)
近年来,随着信息化技术深入到社会各个领域,利用三维激光扫描技术与BIM(Building Information Modeling)技术对古建筑进行数字化保护与传承正逐渐成为研究热点。
三维激光扫描技术又称3D扫描技术,目前国内外大多数研究主要集中于运用三维激光扫描仪对古建筑进行扫描后逆向建模,如Siwei等[1]提出了一种半自动激光扫描方法,说明了3D激光扫描技术可以提高项目的效率和准确性。Bouzakis等[2]通过激光扫描仪获得了帕台农神庙西部带状雕塑的立体几何现状和颜色。Forlin等[3]借鉴ArMedEa项目的两个案例,即伊斯兰设防村庄El Castillejo和十字军城堡Saranda Kolones,从现场数据采集分析所得3D模型,有助于快速且准确地记录破坏的考古背景。Liang等[4]以苏州市环秀山庄后院的假山为例,研究了基于3D现实的建模。Quagliarini等[5]针对古建筑保护和风险评估的问题,提供了一种快速、低成本且安全的3D激光扫描方法,准确地评估建筑物的安全性。熊强等[6]在室内空中轨道上搭载5镜头倾斜相机,利用3D扫描技术进行空中三角测量和三维建模。蔺小虎等[7]对大雁塔进行三维激光扫描,获取其点云数据,并对点云数据进行处理,利用Cyclone,AutoCAD,3ds Max三种软件构建了大雁塔的三维模型。周曦冰等[8]采用均匀分布原则对三维模型与点云数据进行特征信息提取,提出了一种新的基于三维模型的古文物本体图制作方法。
综上所述,3D扫描技术可对建筑进行数字化、信息化的记录,提高项目的效率,但其只能建立建筑的表面模型,建筑物内部构造无法准确表达。而BIM技术可对建筑物进行实体三维构建,且BIM技术应用到古建筑保护与修复方面的研究在我国还处于起步阶段,信息化对古建筑保护和开发的作用并没有充分体现,对宗教建筑运用信息化技术手段进行保护与传承更是空白。因此可利用三维激光扫描技术与BIM技术结合构建BIM模型,以实现利用点云数据构建BIM模型的目的,进而实现基于信息化平台统一管理,探索古建筑全寿命周期的管理。
本文针对古建筑建模这一问题,提出三维激光扫描技术与BIM技术集成的理念,借助三维激光扫描技术实现古建筑BIM参数化建模。其基本思路是利用Focus S350三维激光扫描仪对大召寺玉佛殿典型构件进行扫描,从外业点云数据获取、内业数据分析处理入手,构建了该典型构件的传统三维表面模型。然后通过dwg格式的中间文件将传统模型转换为BIM模型,并以此为理论重建了单翘单昂平身科斗拱BIM模型。最终对斗拱BIM模型的几何质量进行评价,验证了集成建模方法的可行性。
1 基于点云数据的BIM模型构建
1.1 BIM-3D扫描技术集成原理
在古建筑保护施工之前,通常需要把古建筑现状准确地记录下来。如不能真实、准确记录修缮前典型构件的尺寸,修复尺寸的设计将无所依据。因此,这类构件模型要创建成真实状态下的模型,即逆向建立实体模型。
通过3ds Max建模比用其他软件建模效率高,例如对于重点构件做精模,非重要部分可舍去或者做简模,减小模型数据量,降低建模复杂程度。但由于三维激光扫描仪本身误差,以及技术人员在量取及拼接点云数据等步骤时有人为因素的影响,不同程度造成模型的精度不高等问题,所以目前的Max模型多用于项目三维展示。而Revit参数化建模,虽然模型精度很高,但尚不能对载入的点云数据进行编辑和建模,即利用点云作为原始数据构建BIM模型无理想的途径。基于此,本文提出了BIM-3D扫描技术集成的原理。三维模型根据表达方式不同可分为线框模型、表面模型和实体模型[9]。
首先利用三维激光扫描仪采集点云数据,点云数据经降噪、抽稀、配准后,将处理好的成果点云数据在3ds Max软件中构建古建筑的表面模型,然后将此模型转化为dwg格式的线框模型,最终,以此线框模型为轮廓,载入到Revit软件中构建实体模型。从而实现了以点云数据为数据源,构建Revit实体模型的目的。详细的BIM-3D扫描技术集成框架如图1所示。

图1 BIM-3D扫描技术集成框架
1.2 点云数据采集、处理
扫描工作主要由Faro公司的Focus S350远程扫描仪完成。在点云数据获取之前,先进行现场勘查。由于斗拱外观复杂且受物体遮挡等影响,所以需要分别架设两站进行扫描。本次测绘共布设标靶6个。布设好测站点和标靶后依次将Faro S350扫描仪架设在所选站点并调平(S350设备有±2°倾斜自动补偿功能,无需完全调平)。然后开始扫描作业,单站扫描时间大约6 min,要保证相邻两站间有一定比例的重叠度[10]。
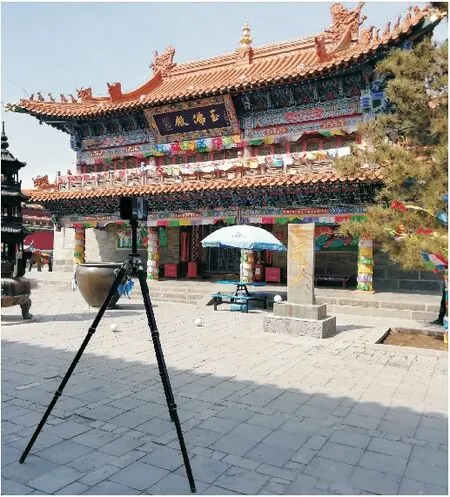
图2 现场扫描
在扫描过程中由于受外界环境因素,如游客、树木、杂物等遮挡的影响,导致采集到的原始点云数据中有许多噪声点,需要对其进行去燥处理;同时采集到的原始点云中有许多重叠区域的数据,且扫描仪与斗拱的距离远近也会导致点云密度不一致,这些冗余的数据造成图形不光滑且浪费存储空间。因此需要对点云数据进行抽稀;在两站的扫描过程中,每一站的点云数据都有自己独立的坐标系。因此必须将点云数据转换到统一的坐标系统中,以得到斗拱的整体点云模型[11]。
本文运用Faro公司自主研发的扫描仪配套软件Faro Scene来进行数据处理。首先新建工程加载点云数据,然后对扫描数据识别后,自动进行点云的降噪、查找标靶球及创建扫描点云,如图3所示,同时将相邻两站扫描点云,以相应视图对两站之间的公共标靶球进行标记对应,利用公共靶球实现两站数据的拼接。运算完成后,在注册模块下检查两站拼接精度并查看两站拼接效果是否符合要求,以确保点云高精度拼接,如图4所示。最后,打开Autodesk ReCap软件,点击新建项目导入斗拱点云数据,开始导入。导入成功后该点云数据将为3ds Max 2016建立模型提供基础参考。
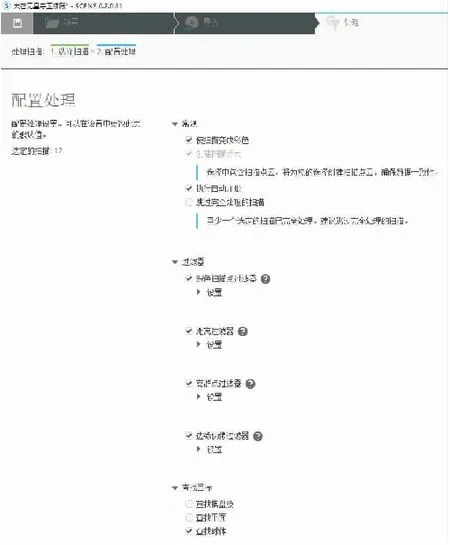
图3 点云去噪过滤
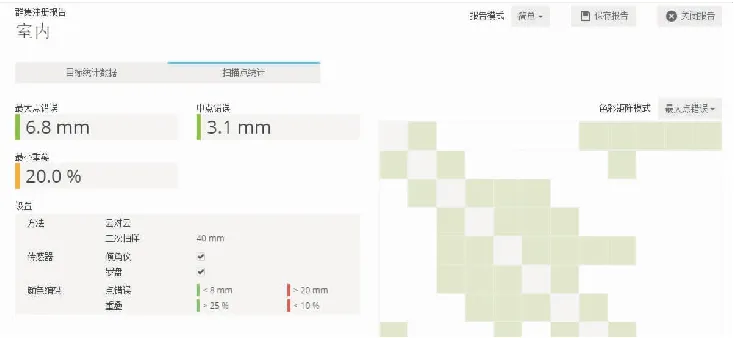
图4 点云数据拼接精度
1.3 斗拱表面模型构建
根据前期的准备工作,本文使用3ds Max 2016进行三维模型创建。在3ds Max软件创建面板中选择点云物体子层级下的点云,导入rcs格式的点云。并将点云的方向调整正确。依据导入的成果点云数据把斗拱分割为坐斗、三才升、槽升子、翘等构件[12],对其各个构件依次进行模型重构,通过样条勾出轮廓,再编辑多边形,进而绘制出各自造型。
内业使用3ds Max软件建立斗拱三维表面模型,是在线框模型的基础上,增加面的信息,其所含信息量少,仅用于三维展示。而实体模型能反映古建筑的材质、尺寸、体积、密度、年代等信息,且能用于古建筑全生命周期的信息管理。因此,构建好的三维表面模型尚不能用于深入研究古建筑,还要对其三维实体模型进行研究。
1.4 斗拱BIM模型构建
由于实体BIM模型所包含的信息量丰富,且有利于古建筑全生命周期的管理,所以下文以玉佛殿单翘单昂平身科斗拱为例,介绍如何将Max模型转换为BIM模型。
首先对已经建好的斗拱进行提取,将其Max文件导出为dwg格式。然后,需要把斗拱构件的dwg整体模型分解为单个元素,如坐斗、三才升、槽升子等[13],其部分CAD线框模型如图5a~12a所示。由于线框模型是用顶点和棱边来表示物体的模型,物体表面和内部材质信息无法表达,信息量少,因此要将它转换成BIM模型。然后再把单个构件的dwg线框模型分别导入Revit做底图,分别新建每一构件族。
具体操作步骤为:新建公制常规模型,以线框模型的顶点和棱边为轮廓,添加参考平面和标高,标注类型尺寸,进行“EQ”操作,对其标注尺寸添加驱动参数。设置工作平面快捷键后,进入每一参考平面,进行拉伸、融合、空心拉伸等操作,构建物体三维实体模型。并添加材质参数,设置材质等信息,完成三维实体模型的创建,如图5b~12b所示的部分Revit实体模型。
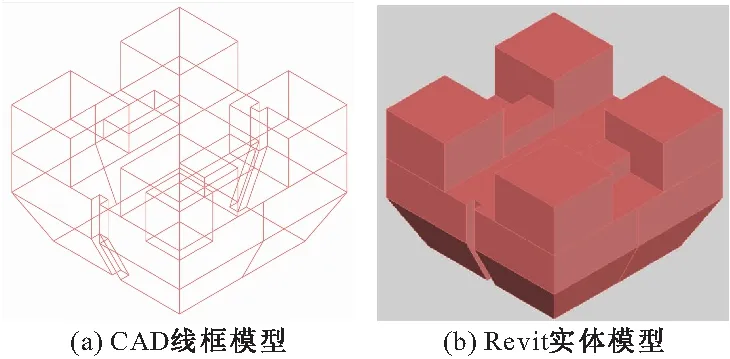
图5 坐斗
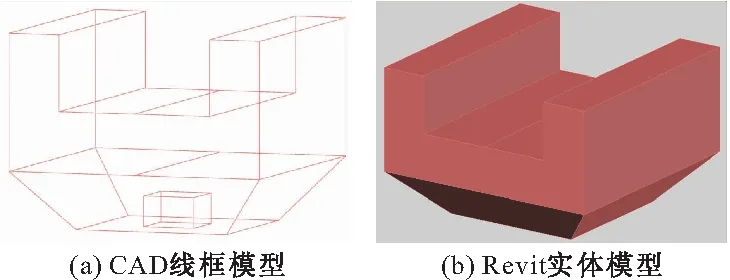
图6 三才升
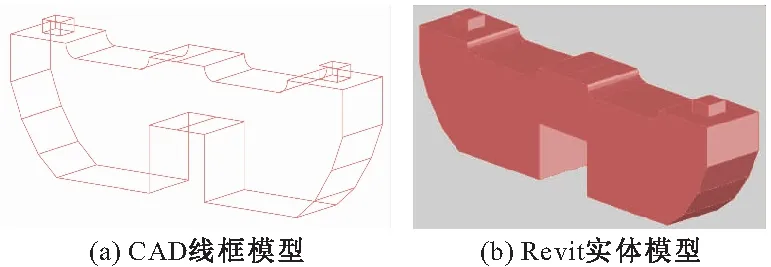
图7 翘
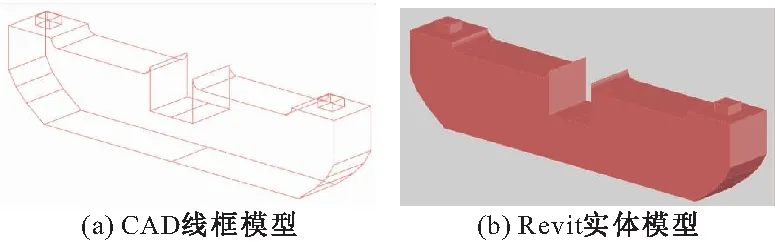
图8 单材万拱
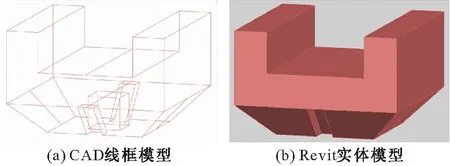
图9 槽升子

图10 撑头木

图11 蚂蚱头
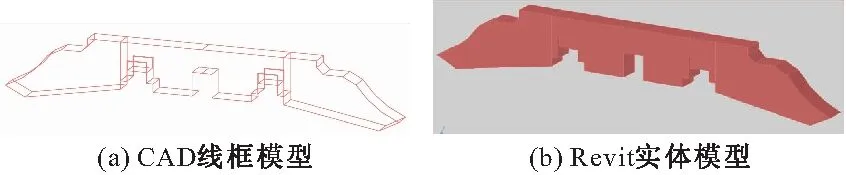
图12 昂
最后载入所有rfa格式的族元素进行组装生成完整构件。用Max模型转换进而用Revit参数化建成的平身科斗拱模型如图13所示。用此方法,可有效地解决Revit不能用点云数据构建实体模型的问题。并通过对最终模型的几何质量进行评价,验证了此方法的可行性。
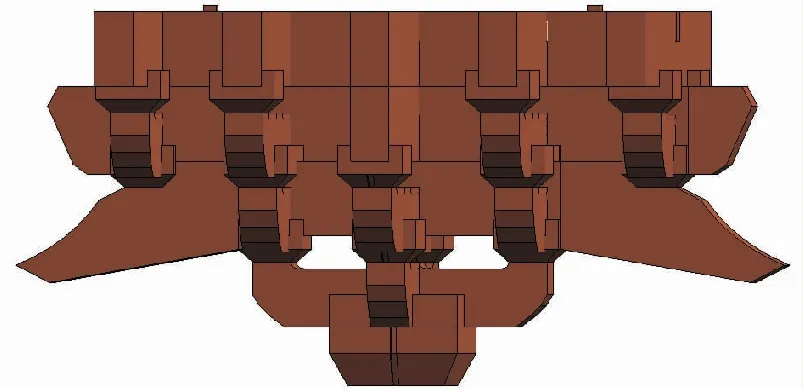
图13 单翘单昂五踩清式斗拱Revit实体模型
2 BIM模型几何质量评价
2.1 几何质量评价体系
模型几何质量是指实际构件与其模型局部位置的偏差情况。与二维空间不同的是,三维空间内模型的组成结构、空间数据信息较复杂。因此,为验证该方法建模精度与结果的可靠性,本研究借鉴三维模型几何质量评价方法[14],采用以局部评估整体的思路,将三维模型分解到基元点、基元线和基元面。根据其特点,选取了基元点的距离偏移A、基元线的长度差B、距离偏移C、角度偏移D,基元面的边数累积差E、面积差F、距离偏移G、角度偏移H共8个指标,通过随机采样,对模型进行质量评价,对比模型尺寸与真实构件尺寸的偏差。
基元点是三维模型的基本单元。随机选取三维模型n个角点,Ui(xi,yi,zi),i∈[1,n]。与之相对应的构件实际坐标点为Vi(xj,yj,zj),j∈[1,n]。计算构件角点与实际点的距离差值,用式(1)表示:
(1)
该三维模型基元点距离偏移值A通过计算角点距离差值平均值得出。
(2)
基元线是三维模型基本要素,以端点坐标、确定的线段为例,评价基元线空间几何质量。模型中线段LU的端点为U1(x1,y1,z1),U2(x2,y2,z2),构件实际线段LV的端点为V1(x3,y3,z3),V2(x4,y4,z4)。LU,LV的长度差为:
(3)
随机选n条模型外边线作为基元线。模型基元线的长度差值B通过n条基元线长度差的均值得到。
(4)
计算LU的两个端点U1,U2及中点PU到LV与之相对应的两个端点V1,V2及中点PV的距离,即U1V1,U2V2,PUPV。模型基元线的距离偏移C由随机选n条基元线计算距离差的平均值得到。
(5)
几何模型基元线的角度偏移值D由计算两条基元线夹角得出,计算过程见式(6)~(8)。
设
(6)
模型基元线LU与实际值LV的夹角α∈(0,90°]。
(7)
(8)
基元面是由基元线构成的具有固定形状的面。本文仅研究平面,对曲面不做研究。随机选取模型n个基元面U,并在实际构件中找到相应面V。计算面U的边数EU与面V的边数EV的差值。统计累计边数差值作为该构件的边数差E。
(9)
基元面通过控制点坐标Pi(xi,yi,zi),i=1,2,…,n,计算其面积。
S(P1P2…Pn)
(10)
随机选取n个多边形,计算模型基元面U的面积SU和实际构件对应面V的面积SV,模型的面积差值F由计算面U,V的面积差平均值得出。
(11)
选取n个基元面,该构件基元面的距离偏移值G通过测量模型基元面U控制点坐标Ui(xi,yi,zi)(i=1,2,…,k)到实际基元面V(A2x+B2y+C2z+D2=0)的距离的均值得出。
(12)
对于三维模型的基元面U:A1x+B1y+C1z+D1=0,设其法向量为m=(xm,ym,1)
任意选取基元面U的3个控制点坐标U1,U2,U3,得到式(13):
(13)
求解得到法向量m。同理求出实际基元面V:A2x+B2y+C2z+D2=0的法向量为n=(xn,yn,1)。
根据三维空间两条直线的向量夹角公式可得法向量m与n的夹角β,β∈(0,90°]。
(14)
随机选择模型的n个基元面,该构件基元面的角度偏移平均值H为:
(15)
2.2 BIM模型的精度分析
将已建成的平身科斗拱BIM模型作为研究对象,选取斗拱的每个构件进行试验分析,共计十二个构件,分别为坐斗、十八斗、槽升子、三才升、正心瓜拱、正心万拱、单材瓜拱、单材万拱、厢拱、翘、昂、蚂蚱头。全站仪作为传统的测量手段,测量精度较高,可以作为基准参考。本次通过分别对每个构件随机采样选取基元点10个、基元线8条、基元面8个,然后将BIM模型与全站仪测量的对应的数据进行计算,依次计算出平身科斗拱的A,B,C,D,E,F,G,H的值。具体结果见表1。
将斗拱分为斗、升类构件,拱、翘类构件和昂、蚂蚱头,通过表1对斗拱这三类构件的BIM模型几何质量进行分析。本文的研究对象——斗拱主体长1200 mm、宽614 mm、高588 mm,基元点、线、面的距离偏移、角度偏移等数值均在此数量级基础上进行分析。
(1)基元点分析
BIM模型的点距离偏移A=4.16 mm,其中斗、升类构件的平均点距离偏移A斗、升=3.99 mm;拱、翘类构件的平均点距离偏移A拱、翘=4.03 mm;昂与蚂蚱头的平均点距离偏移A昂、蚂蚱头=4.50 mm。
(2)基元线分析
BIM模型基元线的长度差值B=3.35 mm,距离偏移C=3.13 mm,角度偏移D=0.28°。

表1 逆向三维模型几何质量评价
(3)基元面分析
BIM模型基元面的面积差值F=14.83 mm2,距离偏移G=3.22 mm,角度偏移H=0.35°。
其中基元线、基元面分析中对于斗、升类构件,拱、翘类构件,昂与蚂蚱头,根据数据结构即可发现其精度差异,不再单独对其计算分析。将以上数据汇总如表2所示。
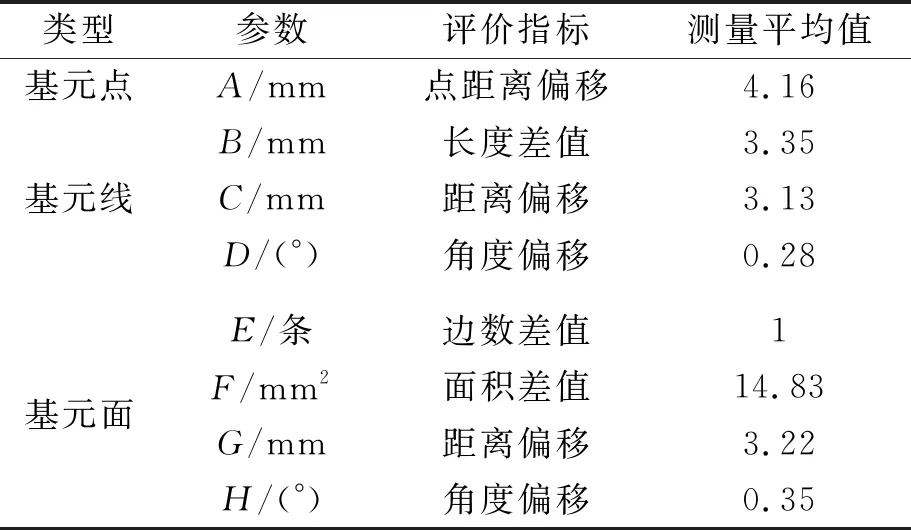
表2 模型几何精度统计
综合以上分析,得出斗拱BIM模型的总体几何精度较高,基本验证了集成BIM-3D扫描技术建模方法的可行性。对误差来源进行分析,其主要来源于三个方面,一是数据源的精度,二是构件的复杂程度,三是人为因素。这些因素都会导致模型精度降低。以下是其精度降低的主要原因:
(1)原始数据的精度
本文使用的Focus S350三维激光扫描仪本身误差,其三维位置精度,与建筑物距离10 m时,其原始点云精度为±2.00 mm;与建筑物距离25 m时,其原始点云精度为±3.50 mm。加之,后期内业对点云数据抽稀、降噪、拼接等处理,以及建模时点云分割、特征线提取等人为因素的加入,不可避免地造成误差的增大。
(2)构件的复杂程度
外形规整简单的构件,其模型几何形态也相应简单,其相对于复杂构件模型的精度较高。通过对比上表1不同类构件的基元点、基元线、基元面误差可以发现,斗、升类模型的精度最高,因为其构件组成简单,横平竖直,结构清晰,建模过程中人为误差较少。拱、翘次之,因为其有拱眼,有的构件预留有垫拱板槽位,还有卷杀等,细部构造复杂,建模难度较大。昂与蚂蚱头的误差最大,由于昂尖的弯曲弧形、尾部的菊花头及蚂蚱头的出锋等细部构造的复杂化,也会直接影响到模型的几何精度。
(3)人员素质及软硬件配置
内业技术人员的专业素质,电脑的软硬件配置等也会导致三维模型的几何质量有差异。
3 基于点云数据的BIM模型构建方法
通过对古建筑斗拱的建模研究,三维模型几何质量评价验证了用三维激光扫描采集点云数据构建古建筑BIM模型建模的精度与结果的可靠性。目前对古建筑建模,根据原始数据获取方式的不同,大致分为两类:一类为正向建模,第二类为逆向建模。
第一类,如古建筑符合形制规律[15],同时古建筑本身的变形不大,建模所需要的数据量少,其他经济、技术、人力等条件很差的情况下,正向模型比较适合。但是利用形制规律建模较繁琐,需要通过查阅大量资料核对构件尺寸来获得数据。
第二类,如果古建筑不符合形制规律,不规则,又没有前人的研究结论,很多细节构造难以掌握,对于建模来说完全没有数据源。同时古建筑本身变形、残缺比较严重,此时,逆向模型比较合适。这种情况就必须采用全站仪、皮尺等传统测绘手段获取原始数据,否则无法建立模型。这也是目前主要采用的测绘建模方式。这种测绘、建模方式需要较多的经济、技术、人力等的支持。三维激光扫描技术的引入,虽然能解决部分传统测绘的不足,但是由于三维激光扫描仪型号各异,点云格式及处理软件不统一,且无法使用Revit对点云数据进行建模。导致目前的Revit多用于正向设计建模中。
综合以上两种情况,提出了利用三维激光扫描采集点云数据构建古建筑BIM模型,即利用三维激光扫描仪对具有代表性的构件进行扫描,将采集到的点云数据作为数据源,逆向建立古建筑构件的Max模型,在转换格式后通过添加属性信息及驱动参数构建古建筑主要构件BIM模型。这样既利用了3ds Max建模效率高的特点,又充分利用了Revit参数化建模的精确性。本文为古建筑信息数字化模型的建立提供了一种新思路。
4 结 语
在古建筑几何模型重建方面,三维激光扫描技术作为一项新兴的数据获取手段,效率优势明显。本文以玉佛殿单翘单昂斗拱为研究对象,使用Focus S350三维激光扫描仪对该古建筑斗拱进行实地测量,获取了其完整的三维数字信息,并使用Faro Scene,3ds Max,Revit等相关专业软件构建了其BIM模型。最终对已建斗拱BIM模型的几何质量进行评价,验证了集成BIM-3D扫描技术建模方法的可行性。为古建筑的数字化保护提供了理论依据,有助于推动内蒙古地区藏传佛教建筑的保护、修复及重建工作。
猜你喜欢
兵工学报(2022年2期)2022-05-22
少儿科学周刊·儿童版(2021年20期)2021-12-11
兵工学报(2021年4期)2021-06-19
中华民居(2020年3期)2020-07-24
兵工学报(2020年12期)2020-02-06
流行色(2019年10期)2019-12-06
科学导报(2018年30期)2018-05-14
科技创新与应用(2017年4期)2017-03-27
文艺生活·下旬刊(2017年2期)2017-03-18
航空知识(2001年4期)2001-06-07