
基于遗传算法优化支持向量机工况识别的燃料电池混合动力汽车能量管理策略
2020-06-23 10:26谢金法时佳威李豪迪
科学技术与工程 2020年14期
赵 勇, 谢金法*, 时佳威, 李豪迪
(1.河南科技大学车辆与交通工程学院,洛阳 471003;2.同济大学汽车学院,上海 201804)
燃料电池汽车是未来汽车发展的重要方向之一,对大质量、长续驶里程的中大型货车尤为适用[1-2]。目前,燃料电池与蓄电池的电电混合系统对于货车是一个有效的解决方案[3-4]。
行驶工况是影响汽车燃料经济性的重要因素,如果能够针对不同行驶工况,制定相应的能量管理策略,使得动力分配更加合理,汽车的燃料经济性也可以随之进一步提高[5]。目前基于工况识别的混合动力汽车识别方法主要有神经网络算法识别[6-7]、模糊控制器识别[8]和基于聚类理论的识别[9]。其中,采用神经网络识别行驶工况时,必须预先提供大量训练数据,但是具备大量样本数据在实际操作中较为困难,所以很难得到较高的识别准确率;而模糊识别,由于其参数主要根据专家经验设置,主观性较强,不易得到较高识别精度;聚类算法识别时,输入参数的个数和聚类中心初始值的选定均会对识别结果产生较大影响,不利于识别准确率的稳定性。因此,提高汽车运行工况的识别精度和稳定性,并建立一种满足燃料电池混合动力汽车(fuel cell hybrid vehicle, FCHV)不同运行工况的能量管理策略越来越重要。
针对燃料电池混合动力货车,以中国重型商用车行驶工况-货车工况(China heavy-duty commercial vehicle test cycle-truck, CHTC-HT)中高速、市郊和市区3种工况代表车辆的3种行驶工况作为仿真工况,采用遗传算法优化支持向量机(genetic algorithm-support vector machine,GA-SVM)识别算法,建立最优的行驶工况识别模型,针对市区、市郊和高速公路工况分别设计模糊能量管理策略,并采用粒子群算法优化其隶属函数,从而使其具有更好的工况适应性,以达到降低氢耗量并延长蓄电池寿命的目的。
1 FCHV动力系统结构及整车参数
以某FCHV为研究对象,采用质子交换膜燃料电池(proton exchange membrane fuel cell,PEMFC)与蓄电池的电电混合系统,动力系统拓扑结构如图1所示,整车主要参数如表1所示。

图1 FCHV动力系统拓扑结构Fig.1 Topological structure of FCHV power system
2 基于SVM的工况识别
2.1 3种典型工况的选择
根据最新发布的CHTC-HT,包含市区、市郊和高速公路3种工况,该工况是针对中国实际道路状况开发的,较好地反映了中国货车的实际运行工况。选定CHTC-HT循环工况中的3种典型工况作为仿真道路行驶工况:工况1为市区主干道城市工况;工况2为市郊公路上中高速行驶的公路工况;工况3为高速公路上高速行驶的高速公路工况。特征工况如图2所示。
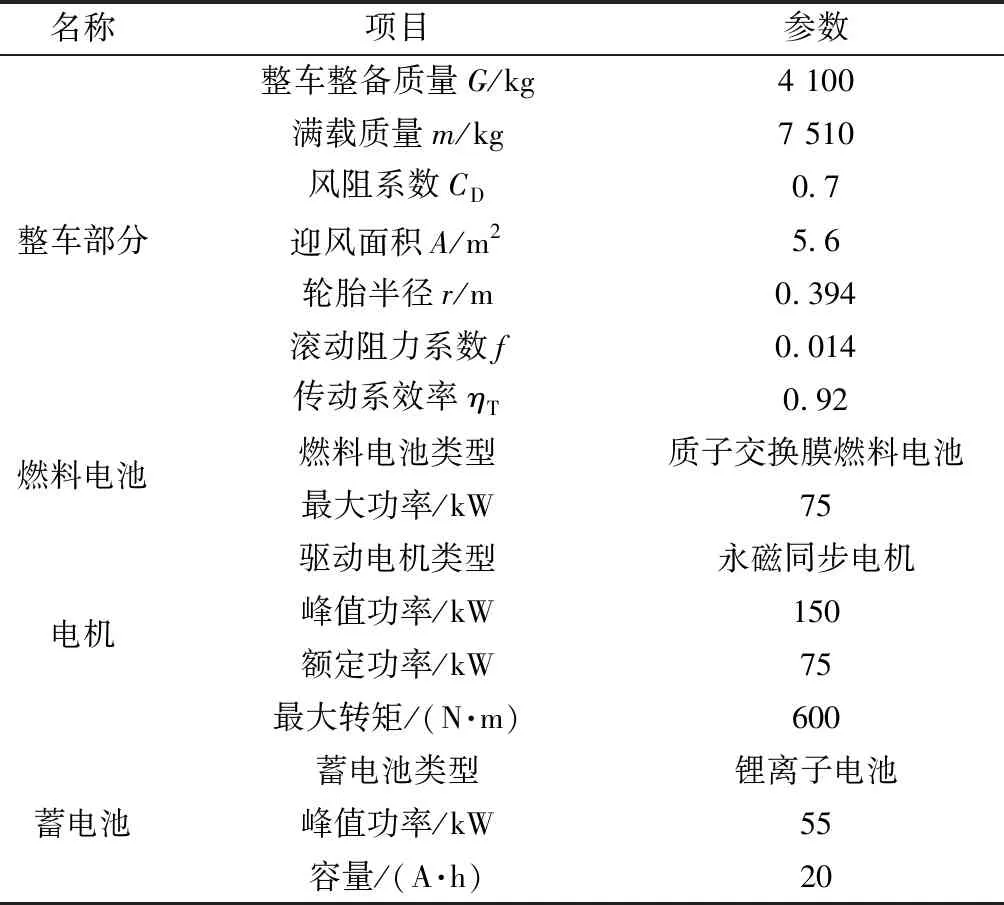
表1 整车主要参数
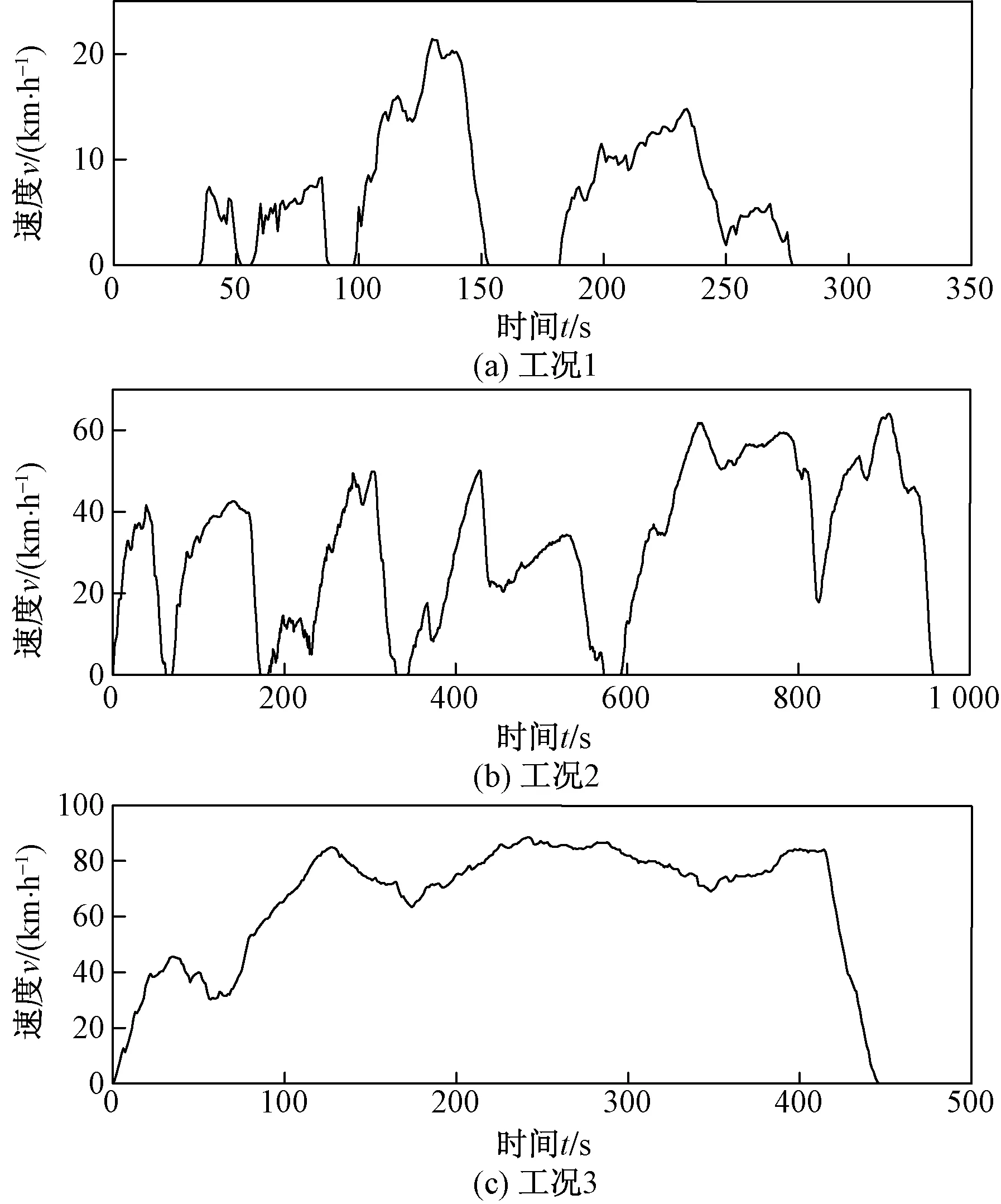
图2 市区、市郊和高速公路工况Fig.2 Urban, suburban and expressway conditions
工况的特征参数直接反映了循环工况的特征,由于工况特征选取过多会造成计算量变大,影响识别速度,而选取过少,会使得工况表述不准确,影响识别精度。所以在满足选取的特征参数能涵盖此循环工况大部分特征的前提下,工况特征参数个数选取不宜过多或过少。根据以上原则及前人的研究成果,选取最能代表循环工况特征的3个参数,即最高速度、平均速度、怠速时间比例,作为评价所研究工况的变量,3种代表工况的特征参数如表2所示。
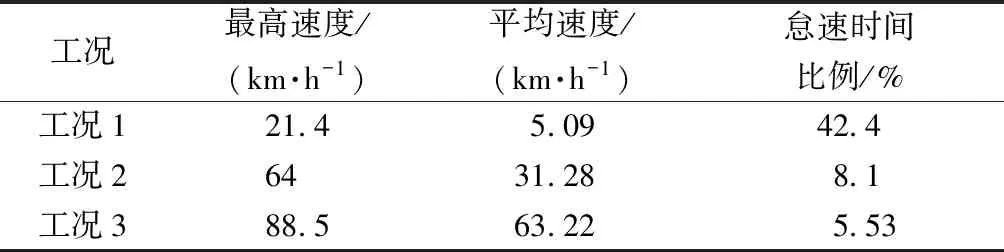
表2 行驶工况特征参数
为使样本数量充足,将道路工况分成片段,每个片段为60 s,并且可以叠加,叠加选择情况如图3所示,1~15代表工况片段的序号。每类行驶工况抽取120个样本,共计360个样本。

图3 道路工况分段示意图(工况3)Fig.3 Segmentation diagram of road working condition (working condition 3)
2.2 遗传算法优化的SVM识别算法
支持向量机(support vector machine,SVM)是基于统计学习理论发展而来的,通过训练学习样本来建立高精度分类模型,对于有限个样本数据,支持向量机相比于其他机器学习方法有着更高的精度,目前,该模型还较少运用到汽车行驶工况识别中,现采用支持向量机作为行驶工况的识别算法。
采用广泛使用的高斯径向基核函数作为支持向量机算法的核函数,惩罚因子C和参数g(RBF核函数中的方差)是影响识别精度的两个重要参数。如果参数选择不合理,识别模型可能出现过度拟合或拟合不够的现象,从而对识别准确率造成负面影响,所以有必要对这两个参数进行选择,以达到更高的识别准确率。
遗传算法由于优化时具有较强的鲁棒性和全局搜索能力,因此被广泛应用。采用遗传算法优化支持向量机(GA-SVM)算法,寻找最佳的C和g,以获得更高的识别精度。从而改善传统交叉验证方法优化时计算繁琐、识别精度低的问题。GA-SVM算法流程如图4所示。
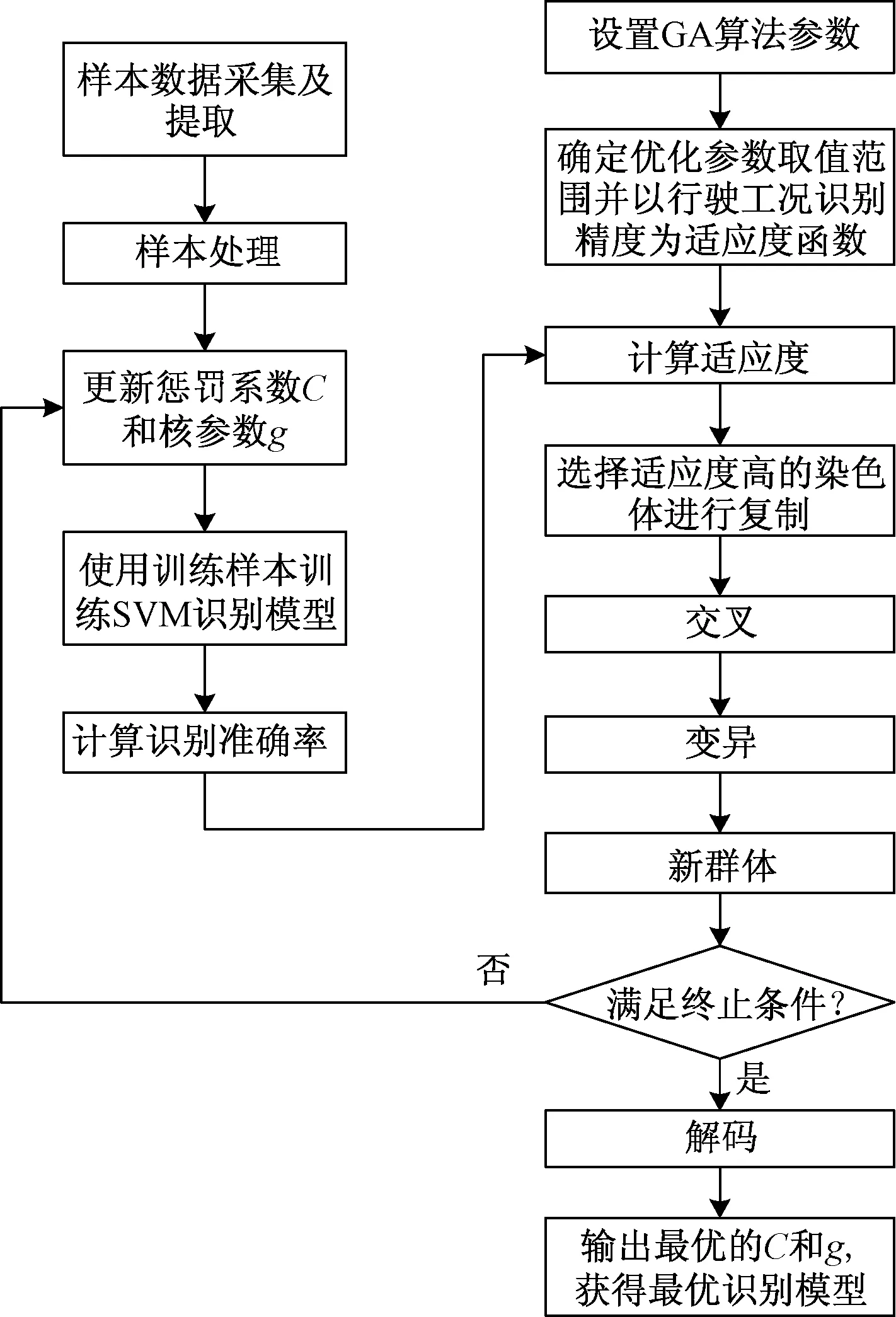
图4 GA-SVM算法流程Fig.4 Flow chart of GA-SVM algorithm
对选取的3种典型工况以最高速度、平均速度、怠速时间比例3个特征参数作为GA-SVM算法的输入参数,识别出的工况类型作为输出参数。为不失一般性,对于每种工况,在采集的特征样本中随机抽取90个作为训练集,剩余的30个作为测试集,建立识别模型,验证识别模型的精度。遗传算法参数设置如表3所示。
分别使用交叉验证方法和遗传算法对SVM行驶工况识别算法进行优化,获得其对应的最佳参数C和g,比较其优化后的识别精度,以验证遗传算法优化的优越性。结果表明,GA算法中,经过 100 次迭代,寻得最优粒子时的识别精度为 95.384 6%,对应的最优参数C=11.013 0,g=2.589 2。而交叉验证方法识别精度最高为89.230 8%,对应的最优参数C=73.516 7,g=1.319 5。由此可见,基于GA-SVM 算法的行驶工况识别精度相对于传统算法优化提高了6.153 8%。

表3 遗传算法参数设置
2.3 识别周期对行驶工况识别精度的影响
由于识别周期(辨识驾驶模式的历史时间长度)对工况识别的准确率会产生影响[10],为了寻找识别准确率更高的识别周期,基于MATLAB平台编写工况识别程序,提取循环工况特征参数,随机生成训练集及测试集,分别以识别周期T为30、60、90、120、150 s,采用遗传算法进行参数寻优,比较优化后不同识别周期下测试集的识别正确率。
通过遗传算法对参数C和g寻优,识别结果如表4所示。当识别周期为30 s时,由于样本长度较短,不能很好地反映工况特征,识别正确率较低,当识别周期为60 s及以上时,识别正确率均保持在较高水平,理论上都可以满足工况识别的要求。

表4 不同识别周期的测试集识别准确率
由于在参数寻优过程中,采集的样本均为确定工况的数据,不存在工况变换交叉区域的工况数据,且不考虑由于采样周期引起的识别结果滞后现象;而实际识别系统是采用历史数据来预测下一段工况的分类,故在实际工况识别中,识别结果将会与实际工况产生一个识别周期的滞后时间,且在工况变换交叉区域的采样数据为混合工况信息,会导致样本信息不能完全代表某一工况,所以在实际工况识别应用中,除了考虑SVM测试集的准确率,还应结合实际测试工况进行进一步验证。
从上述3个类别的工况中,随机选取若干典型工况组合形成一个大的测试工况“市区-市区-市郊-高速-市郊-市区”,分别以60、90、120、150 s为识别周期,进行识别。识别结果如图5所示。
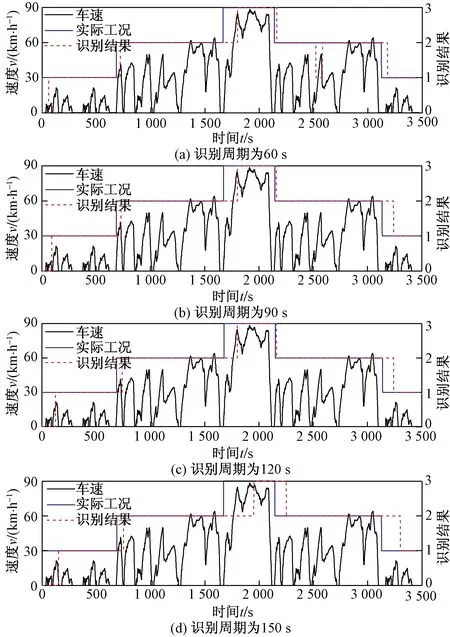
图5 测试工况在不同识别周期下的识别结果Fig.5 Recognition results of test conditions under different recognition cycles
由图5可知,不同识别周期下大致都可识别出其工况,但是4种识别周期的识别结果相对于实际工况均有一定程度的滞后,随着识别周期的增大,滞后越来越明显,从这个层面来看,识别周期越小越好。由于60 s时识别周期较小,包含的信息较少,无法很好覆盖该工况特征,在2 500 s处出现了较为明显的错误,会导致不必要的工况切换;在1 600~1 800 s,4种识别周期下都出现较明显的识别错误。通过分析可知,该阶段为工况2和工况3变换阶段,且工况3起始的速度、加速度等特征值与工况2相近,两者对应的能量管理策略最优参数差距不大。识别周期为150 s时,由于其识别周期过长,滞后效应更加明显,识别错误时间更长。
综合以上分析,当识别周期为90 s和120 s时,识别工况与实际工况的契合度最高,但是由于90 s时产生的滞后较120 s时短,识别结果更接近实际工况,因此采用90 s作为工况识别的识别周期,此时C取10.166 2,g取46.924 6。
3 模糊控制器设计及优化
3.1 基于工况识别的能量管理策略
由于市区、公路、高速公路工况燃料电池货车的需求功率差别较大,无工况识别的能量管理策略在不同工况下采取同一能量管理策略,不能针对不同工况达到自适应控制的效果,故针对市区、公路、高速公路工况分别设计对应的能量管理策略,并与GA-SVM工况识别模块结合,在不同工况下动态选择对应工况的能量管理策略,将会达到更好的控制效果。工况识别能量管理策略示意图如图6所示。

图6 工况识别能量管理策略示意图Fig.6 Schematic diagram of energy management strategy for condition identification
3.2 模糊控制器设计
能量管理策略的目的是保证动力系统不同动力源在整车需求功率和蓄电池电池荷电状态(battery state of charge,SOC)处于不同状态时,合理分配其功率输出,使得燃料电池氢气消耗量更低,蓄电池SOC避免剧烈波动。其输入输出量之间的关系是非线性的,难以建立精确的数学模型,而模糊控制以其较高的自适应性、良好的鲁棒性,适用于燃料电池混合动力系统的能量管理策略。
本文研究的PEMFC的效率图如图7所示。为了氢耗量较低,应使质子交换膜燃料电池系统尽可能在其高效率区间运行,其高效率区间为[5 kW,65 kW]。
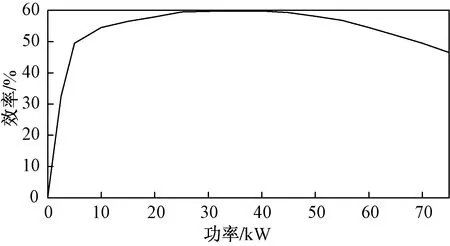
图7 PEMFC效率图Fig.7 Efficiency diagram of PEMFC
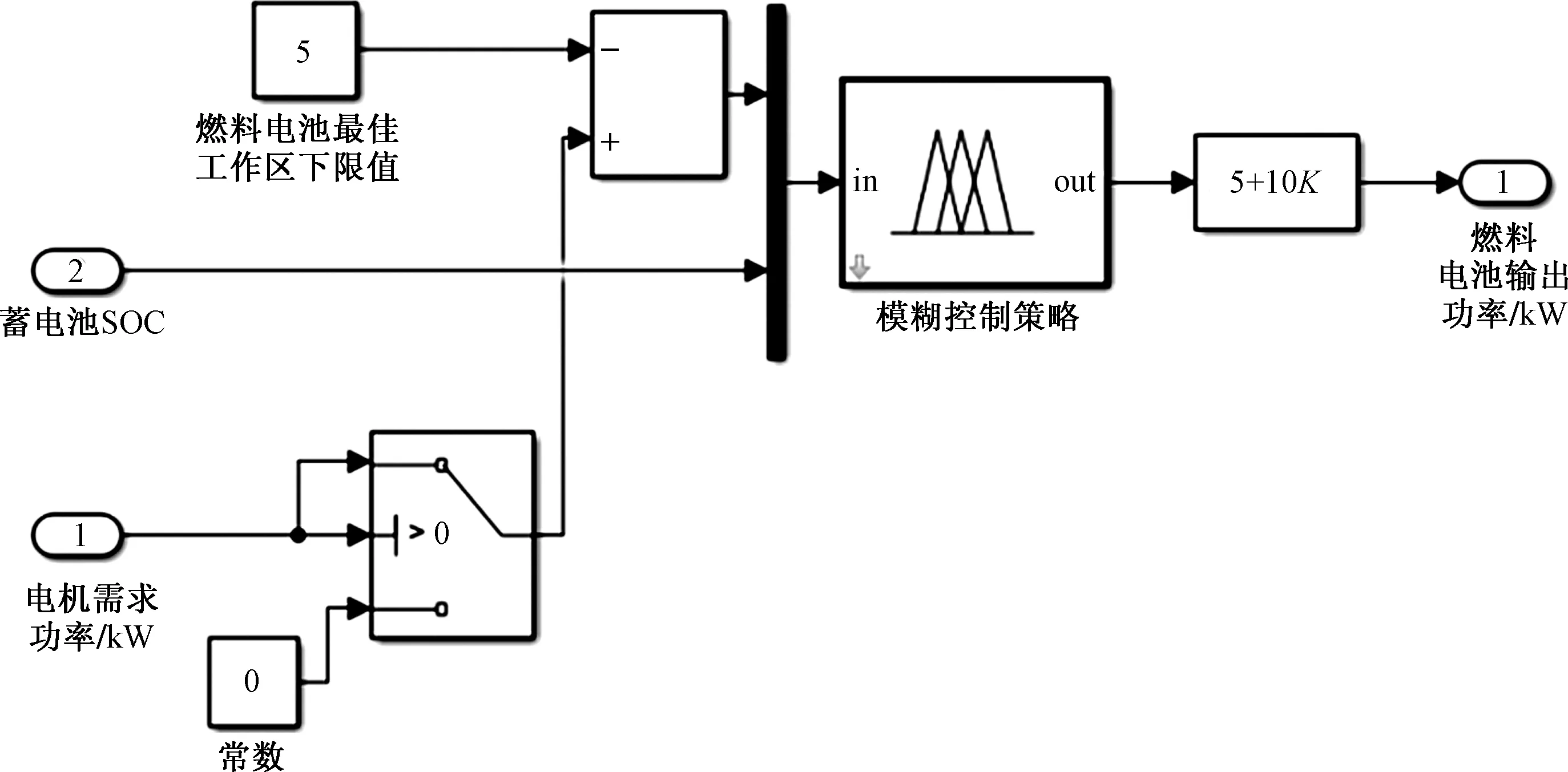
图8 市区工况能量管理策略模型Fig.8 Energy management strategy model for urban conditions
为防止蓄电池过充与过放,且长时间保证整车较高的动力性能,确定蓄电池组的SOC的合理充放电范围为[40%,80%]。
模糊控制器以蓄电池SOC、电机需求功率与燃料电池高效工作区间下限值(5 kW)的差值ΔP为输入量;以比例系数K为输出量。在市区运行工况下,由于电机需求功率绝大部分不大于15 kW,故燃料电池输出的最大功率可设定为15 kW,即燃料电池的输出功率Pfc≤15 kW,Pfc=5+10K,K∈[0,1]。市区工况能量管理策略模型如图8所示。
模糊控制隶属函数如图9所示,其中VS表示非常小;S表示较小;M 表示适中;B表示较大;VB表示非常大。模糊规则如表5所示。
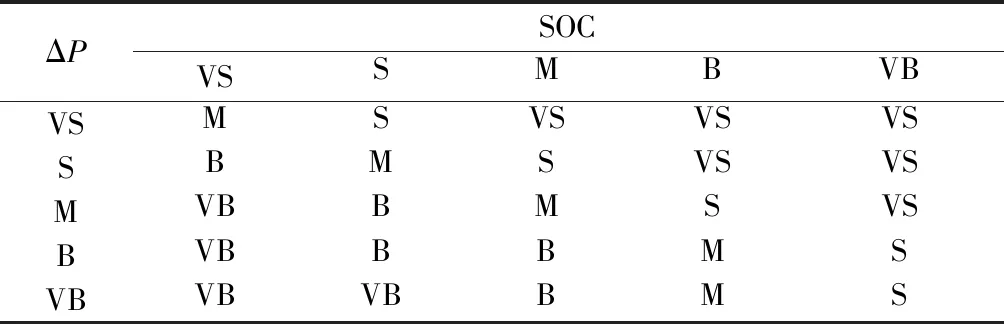
表5 模糊控制规则
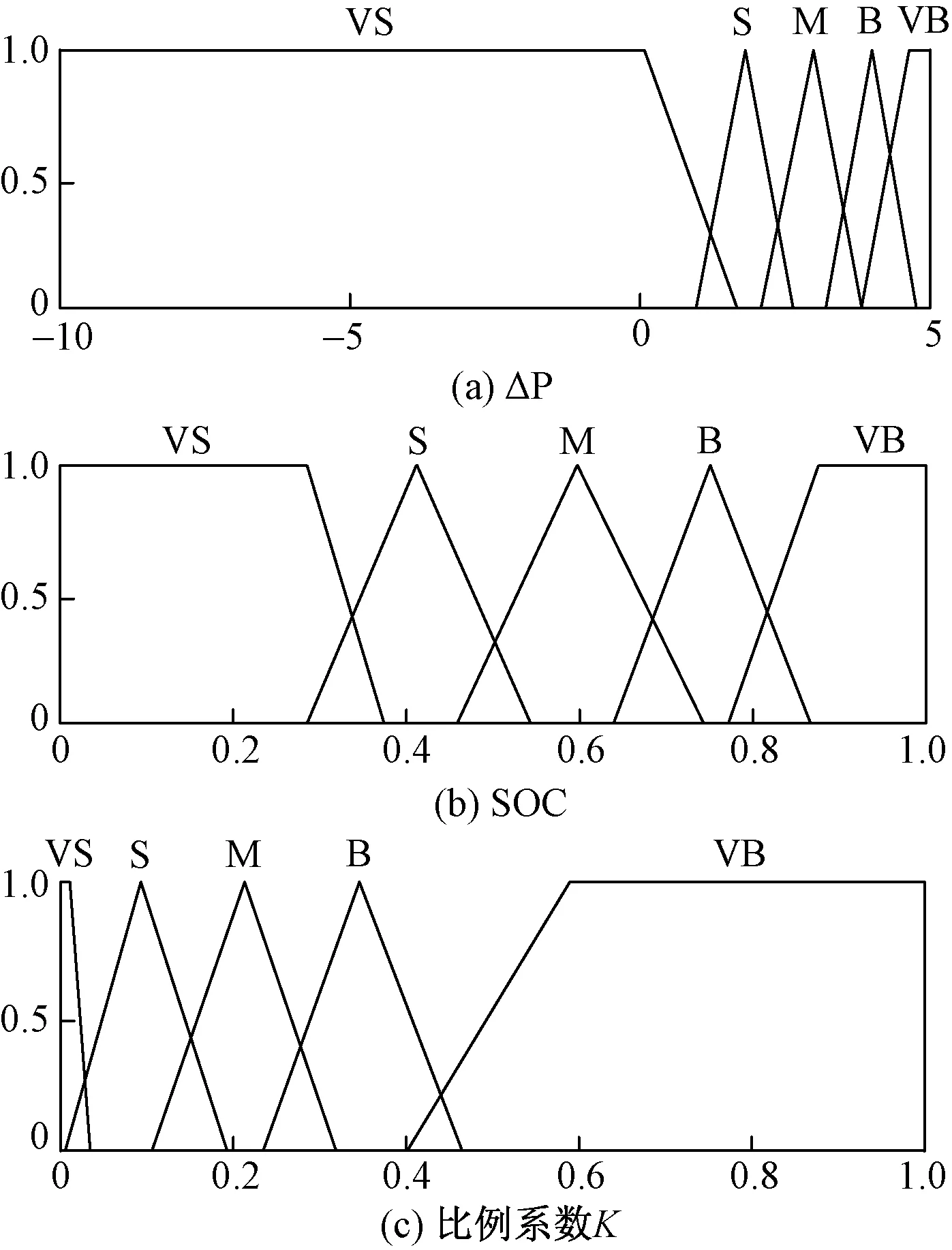
图9 模糊控制隶属函数Fig.9 Fuzzy control membership function
在市郊运行工况下,电机需求功率范围为[0,45 kW],在高速公路运行工况下,电机需求功率范围为[0,80 kW],隶属度函数及模糊规则制定与市区工况下类似,不再赘述。
3.3 隶属函数参数优化
依靠经验设计的模糊控制器带有较大的主观性,很难获得最优的性能,故需对其参数进行优化。粒子群算法具有搜索速度快、参数设置简单等优点,对于隶属函数参数较多且非线性寻优的问题较为适用。所以采用粒子群算法对隶属函数进行离线参数寻优,并将优化后的模糊控制器应用于FCHV能量管理策略中。
优化目标是在保证汽车动力性的前提下,使得整车的等效氢耗量和蓄电池SOC变化量最小,优化目标函数为
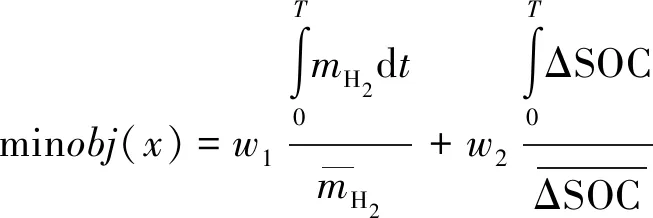
(1)



图10 市区模糊控制器隶属函数优化结果Fig.10 Membership function optimization results of urban fuzzy controller
4 建模与仿真分析
4.1 仿真模型的建立
在Cruise中建立整车模型,在Simulink中建立燃料电池及能量管理策略的模型,然后通过Interface组件进行联合仿真。Cruise和Simulink之间的数据通信示意图如图11所示。
4.2 基于工况识别的仿真分析
为了对比分析,考虑无工况识别、基于传统算法SVM工况识别和基于GA-SVM工况识别3种情况,分别针对以上3种情况以随机测试工况“市区-市区-市郊-高速-市郊-市区”进行仿真。采用工况识别时,将识别结果导入Simulink模型中,运用if else模块针对识别出的不同工况自适应选择其对应的能量管理策略。蓄电池初始值SOC设定为0.6,蓄电池SOC上限和下限分别为0.8和0.4。
分别针对以上3种情况,进行联合仿真,车速跟随情况如图12所示,可以看出,3种情况下的实际跟随车速与目标车速都几乎没有差别,动力性都可满足要求。
无工况识别、传统算法SVM工况识别及GA-SVM工况识别情况下的整车累积等效氢耗量和蓄电池SOC变化曲线如图13、图14所示。

图12 车速跟随情况Fig.12 Speed following
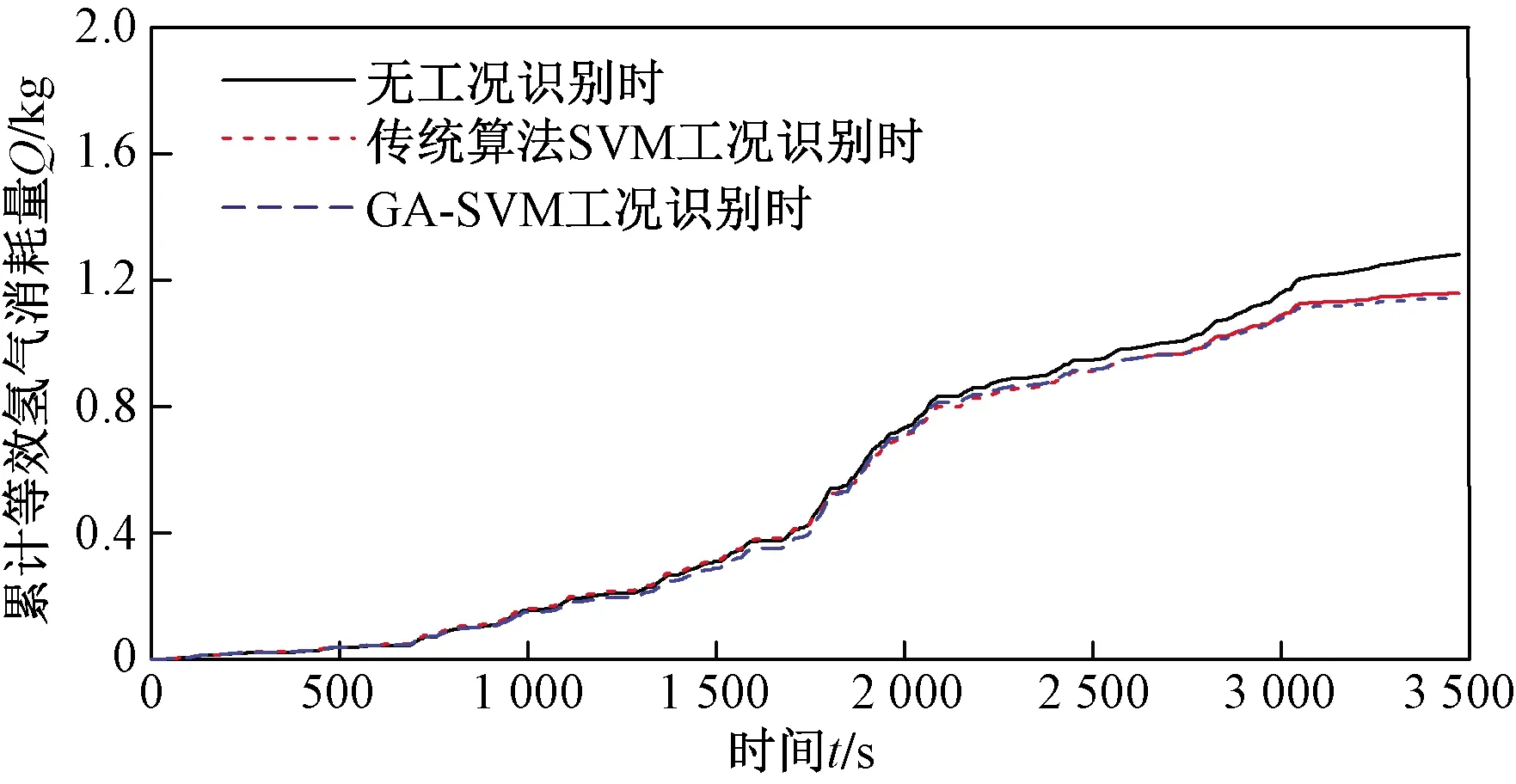
图13 累积等效氢气消耗量Fig.13 Cumulative equivalent hydrogen consumption

图14 蓄电池SOC变化曲线Fig.14 SOC curve of storage battery
由图13可知,测试工况的累积等效氢耗量在无工况识别时,传统算法SVM工况识别时和GA-SVM工况识别时分别为1.239 2、1.158 0和1.142 8 kg,GA-SVM工况识别的情况下,相对于无工况识别时,累积等效氢耗量下降了7.78%;相对于传统算法SVM工况识别时,累积等效氢耗量下降了1.31%。
由图14可知,3种情况下蓄电池SOC都在合理范围内,起始阶段为市区工况,平均需求功率小于燃料电池输出功率,故SOC有一定上升趋势,工况识别的上升幅度较无工况识别小,说明在针对市区工况优化的模糊控制策略对控制SOC变化有较好的效果。采用工况识别时,整个工况SOC变化更加平缓,变化量明显减小,且GA-SVM工况识别相对于传统算法工况识别的SOC变化量又有进一步减少,有利于延长蓄电池寿命。
5 结论
(1)针对CHTC-HT工况,对其中市区、市郊和高速公路工况的特征参数进行提取分析,并采用传统算法和遗传算法优化的支持向量机进行工况识别,结果表明采用GA-SVM识别准确率较传统算法SVM准确率提升6.153 8%。
(2)采用不同识别周期对测试工况进行识别,识别周期为90 s时,识别准确率最高,表明在实际工况识别中,识别周期过长或过短,都不利于识别准确率的提高。
(3)针对市区、市郊和高速工况的不同特点,设计相应的能量管理策略,并采用粒子群算法优化模糊控制器隶属函数参数,得到3类典型工况的模糊控制器的参数。
(4)将GA-SVM工况识别技术应用到燃料电池混合动力汽车的能量管理策略中。由仿真结果可知,相对于无工况识别的模糊能量管理策略,基于GA-SVM工况识别策略使累积等效氢耗量降低7.78%,与传统算法优化的SVM工况识别策略相比,累积等效氢耗量降低1.31%,表明本文提出的能量管理策略提升了汽车燃料经济性,且蓄电池SOC变化量降低,变化更平缓,提高了蓄电池寿命。
猜你喜欢
中学生数理化(高中版.高二数学)(2020年2期)2020-04-21
幼儿画刊(2018年10期)2018-10-27
车迷(2017年12期)2018-01-18
汽车维修与保养(2017年1期)2017-05-15
电子制作(2017年10期)2017-04-18
中外玩具制造(2016年5期)2016-11-06
汽车维修与保养(2016年1期)2016-09-07
汽车维修与保养(2016年12期)2016-03-14
汽车维修与保养(2016年11期)2016-02-21
汽车与新动力(2014年4期)2014-02-27
