变结构航天器模糊神经网络滑模控制器设计
2020-06-23 07:58王冉周志成曲广吉陈余军
中国空间科学技术 2020年3期
王冉,周志成,曲广吉,陈余军
1. 中国空间技术研究院 通信卫星事业部, 北京 100094 2. 中国空间技术研究院, 北京 100094
随着航天技术的发展,出现了具有变结构特性的航天器,例如带有大型可展开天线的遥感、通信卫星以及在轨组装的航天器等。这类航天器在轨展开后结构尺度可达几十米甚至上百米,展开过程中航天器的质量分布和刚度特性将发生明显变化。如果按照单一在轨构型及其动力学特性进行姿态控制系统设计,有可能使航天器姿态产生较大偏差甚至失稳,因此研究适用于变结构过程的姿态控制方法具有重要的工程价值。
近些年滑模变结构控制器有了较快发展,相对于PID控制器具有更强的鲁棒性,可用于复杂航天器的姿态控制[1-2],但存在设计复杂、计算量大、抖振等问题。在滑模控制中,具有PID形式的滑模面和传统滑模面相比具有更快的响应速度和更高的稳态精度[3],将其与群智能算法[4]、反步法[5]、状态观测器[6]以及神经网络[7]等结合起来,可进一步提高其控制性能。模糊神经网络具有逻辑推理和自学习能力[8],将滑模控制与其结合可以实现自适应滑模控制,并降低抖振[9]。将模糊神经网络与滑模控制器相结合,可用于带有柔性附件的航天器[10]、机器人[11]、陀螺仪[12],电机[13]等的控制,但是以上研究对象的模型参数未发生明显改变。对带有大天线的航天器进行动力学建模面临新的问题[14],对大天线展开过程整星的动力学建模可采用多体动力学方法[15]、绝对节点坐标法[16]等,但是存在模型数据量大,难以进行控制仿真等工程问题,实际应用中需要采用工程可用的动力学建模方法。
本文以带有可展开天线的航天器天线在轨展开过程为研究对象,在考虑大天线展开的刚柔耦合动力学模型基础上,利用RBF神经网络逼近变结构航天器的动力学模型。由于传统的PID控制器和滑模控制器难以满足天线展开期间航天器姿态控制的要求,为进一步提高姿态控制器的鲁棒性,设计模糊神经网络自适应调节滑模控制的参数。其中,滑模控制具有PID滑模面,在变结构过程结束后由滑模控制直接切换为PID控制器以减小抖振的影响。模糊神经网络自适应滑模控制器相较于传统滑模控制器具有更强的鲁棒性和更快的响应速度,可以提高航天器变结构期间的稳定性和控制精度。
1 带有柔性附件的变结构航天器动力学建模
航天器有两个柔性太阳翼和一个大型可展开天线,天线展开时航天器质量不变而构型发生改变,整星的惯量参数和耦合系数均发生改变,利用混合坐标法进行模化,在此模型的基础上利用拉格朗日方法及其伪坐标形式可以得到柔性耦合动力学方程[17-18]。
动力学模型示意如图1所示。其中,OI-xIyIzI为惯性系,Ob-xbybzb为星本体系,Oa-xayaza、Osl-xslyslzsl和Osr-xsrysrzsr分别为天线和左右太阳翼的附件坐标系。
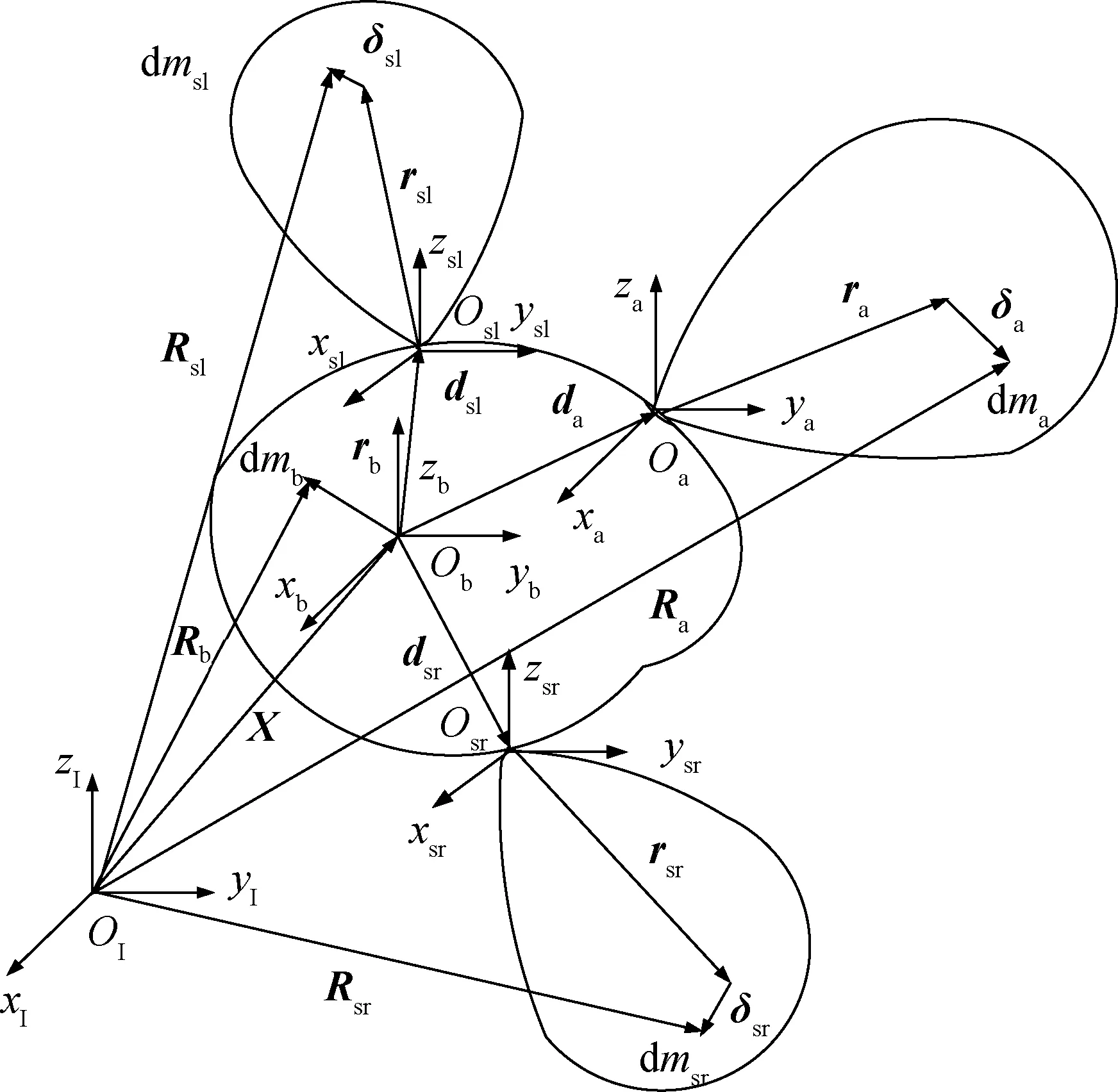
图1 动力学模型示意Fig.1 Dynamical model
星本体质点位置矢量:
Rb=X+rb
式中:X为航天器质心相对于惯性系位置矢量,在惯性系中度量;rb为星本体任意一点dmb相对于质心的位置矢量,在星本体系中度量。
天线质点位置矢量:
Ra=X+da+ra+δa
式中:da为天线与星本体连接点相对于航天器质心的位置矢量,在星本体系中度量;ra为天线任意一点dma相对连接点的位置矢量;δa为变形位移,在天线坐标系中度量。
太阳翼质点位置矢量为:
Rsi=X+dsi+rsi+δsi
式中:i=l,r,分别表示左右太阳翼;dsi为太阳翼与星本体连接点相对于航天器质心的位置矢量,在星本体系中度量;rsi为太阳翼任意一点dmsi相对连接点的位置矢量,δsi为变形位移,在太阳翼坐标系中度量。
星本体质点速度矢量:
天线质点速度矢量:
式中:ωs为星本体转动角速度;ωa为柔性附件转动角速度。
太阳翼质点速度矢量:
式中:ωsi为太阳翼转动角速度。
星本体质点速度在惯性坐标系下的矩阵形式表示为:
天线质点速度在附件坐标系下的矩阵形式表示为:

太阳翼质点速度在附件坐标系下的矩阵形式表示为:

星本体动能为:
(1)
式中:Mb为星本体质量阵;Ib为星本体惯量阵。
太阳翼动能为:

(2)

大天线动能为:

(3)

则系统总动能为:
T=Tb+Ta+Tsr+Tsl
(4)
系统总势能为:
V=Va+Vsr+Vsl=
(5)
式中:Λa、Λsl、Λsr分别为天线和左右太阳翼的广义刚度阵。
由拉格朗日方程和伪拉格朗日方法,考虑到天线展开过程中,航天器的转动惯量、刚柔耦合系数、天线振动频率均随时间改变,忽略太阳翼的转动,得到变结构航天器的刚柔耦合动力学方程为:

(6)

(7)
(8)

(9)

(10)

(11)

式(6)为航天器质心的平动方程,式(7)为航天器绕质心的转动方程,式(8)为天线展开质心平动方程,式(9)(10)为太阳翼振动方程,式(11)为天线的振动方程。
方程(6)可进一步简化为:
(12)

根据天线展开的实际规律,本文设定天线展开符合余弦规律,方程(8)等价于:
(13)
式中:d为反射器展开过程中质心运动的总距离;T为反射器展开的总时间。
2 模糊神经网络自适应滑模控制律设计
具有PID形式的滑模面如下:
(14)
式中:s=[s1,s2,s3]T;e=αd-α,αd为期望姿态角,α为实际姿态角,所需的控制测量量与PID控制器相同;
则相应的滑模控制律为[19]:
u=ueq+uss=
(15)
式中:ueq为等效控制;uss为切换控制;Kp、Kd为等效控制系数阵;K、ε为切换控制系数阵,Kpj=Ijq2j,Kdj=Ijq1j,j=1,2,3。

从而得到姿态角与控制力矩的近似线性关系:
(16)
利用模糊神经网络调整控制参数,模糊神经网络的结构如图2所示。
图2 模糊神经网络结构Fig.2 Structure of fuzzy neural network
第1层:输入层。输入层的神经元和输入维数一致,并直接传递到下一层。其输出为:
o1=[xc1,xc2]
(17)
式中:xc1=yd(k)-y(k)=e(k),xc2=wd(k)-w(k)=ew(k),yd和wd为期望姿态角和姿态角速度,y和w为实际姿态角和姿态角速度。
第2层:模糊化层。隶属度函数采用高斯函数,模糊化层的输出为:
(18)
式中:i=1,2;j=1,2,…,N,N为模糊集的个数。
第3层:模糊推理层。模糊推理层依据模糊法则进行计算,其输出为:
o3(i,j)=φ1i·φ2j
(19)
式中:i=1,2,…,N;j=1,2,…,N。
第4层:输出层。输出为控制参数变化量:
(20)
式中:n=p,d;i=1,2,…,N;j=1,2,…,N。
价值函数的定义为:
(21)
权值ωn的变化量为:
(22)
其中:i=1,2,…,N;j=1,2,…,N;n=p,d。
权值的递推公式为:
ωn(i,j)|k=ωn(i,j)|k-1+Δωn(i,j)|k+
α[ωn(i,j)|k-1-ωn(i,j)|k-2]
(23)
其中:k为迭代次数。
高斯函数参数cij的变化量为:
(24)
高斯函数参数cij的递推公式为:
cij|k=cij|k-1+Δcij|k+αc(cij|k-1-cij|k-2)
(25)
高斯函数参数bij的变化量为:
(26)
高斯函数参数bij的迭代公式为:
bij|k=bij|k-1+Δbij|k+
αb(bij|k-1-bij|k-2)
(27)
基于模糊神经网络的自适应滑模控制原理图如图3所示。
图3 控制系统原理Fig.3 Control system diagram
3 仿真系统建立及仿真分析
航天器惯量在25 s内从初始状态变化为终止状态,如表1所示。太阳翼基频为0.18 Hz;天线未展开时,基频为0.7 Hz,天线展开1/3时,天线基频为0.10 Hz,天线展开2/3时,基频为0.08 Hz;天线全展开时,基频为0.12 Hz。
表1 变结构航天器质量参数
初始姿态为正常在轨运行状态。柔性附件取前六阶模态,天线的展开对整星姿态的影响近似为天线质心平动和天线振动两部分;振动频率和耦合系数随结构的改变而变化,由于难以得到大天线展开过程每一时刻的有限元模型,耦合系数由展开初始状态,展开1/3处,展开2/3处的有限元模型插值近似得到。执行机构为10 N推力器,在星本体坐标下,产生的控制力矩可表示为T=[30,80,30] N·m。在航天器变结构过程中采用滑模控制器,结构固定后切换为PID控制器。取带宽为天线展开后基频带宽0.12 Hz的1/3左右,稳定裕度大于70°,则控制参数初值取为:Kp=[45,50,50],Kd=[800,1 000,1 000]。取RBF神经网络的隐层节点为6;FNN第2层节点数为10,第3层节点数为25。
图4 姿态角曲线Fig.4 Attitude angle curves
图4是天线展开过程及展开后,航天器分别在无控、滑模控制和模糊滑模控制情况下的姿态角曲线。从图4(a)可见,无控条件下,天线展开会使航天器产生15°左右的偏差,如果不对姿态进行控制将会对航天器的正常运行造成影响;从图4(b)可见,采用具有PID型滑模面的滑模控制器对变结构过程进行姿态控制,航天器姿态和柔性附件振动经过500 s左右可收敛到0.04°以内,姿态角收敛较慢,且姿态出现多于3次的明显振荡;从图4(c)可见,模糊神经网络自适应滑模控制器的控制参数随着航天器结构的变化改变,经过40 s可收敛到0.02°以内,得到的航天器姿态角收敛速度明显加快,且航天器姿态只出现2次振荡,有效减小了整星的姿态振荡。
图5是柔性附件的振动曲线。从图5(a)(b)可以看出,太阳翼的振动经过400 s左右收敛到0.04以内;从图5(c)可以看出,天线振动经1 400 s收敛到0.1以内,柔性附件振动可以得到有效抑制。
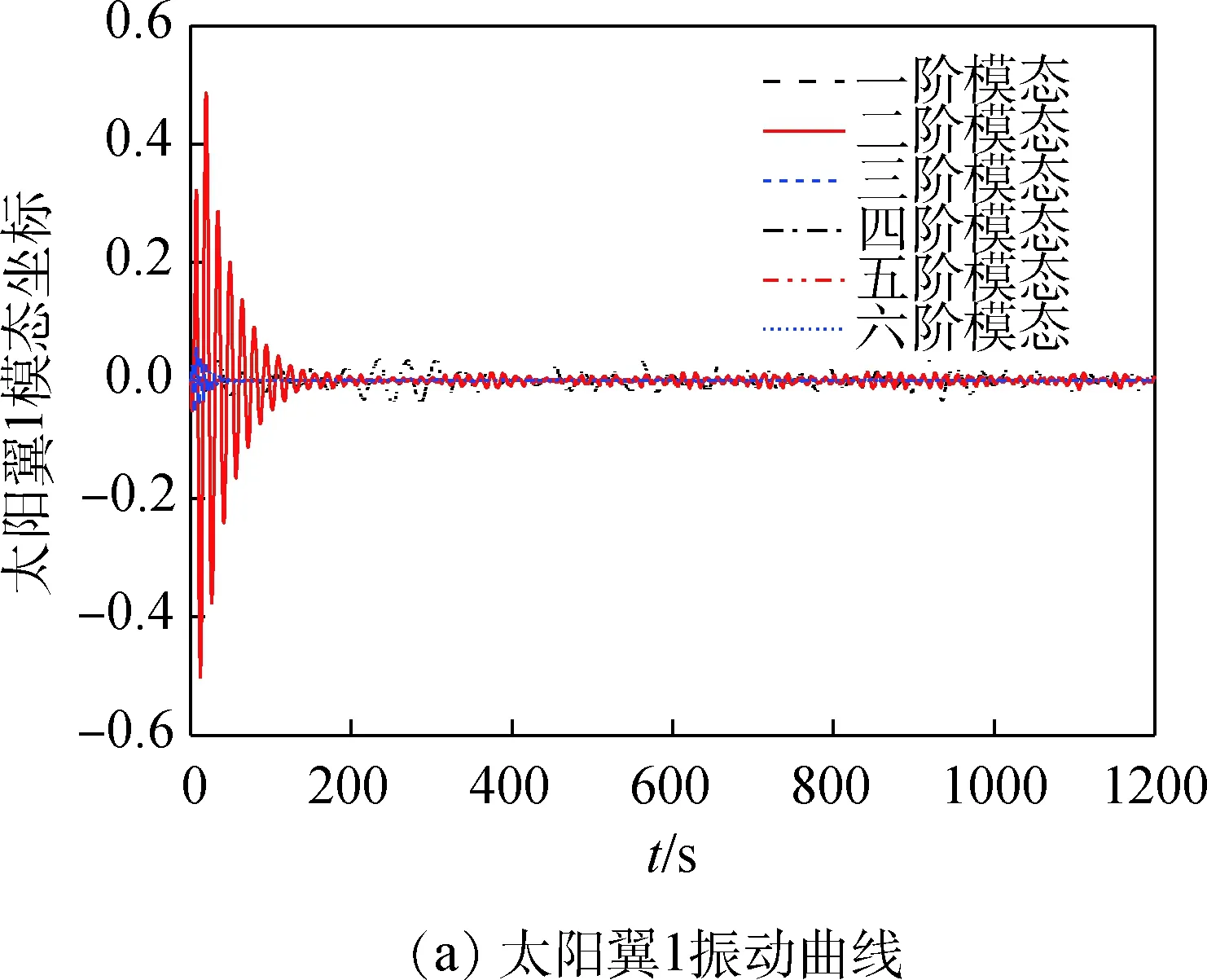
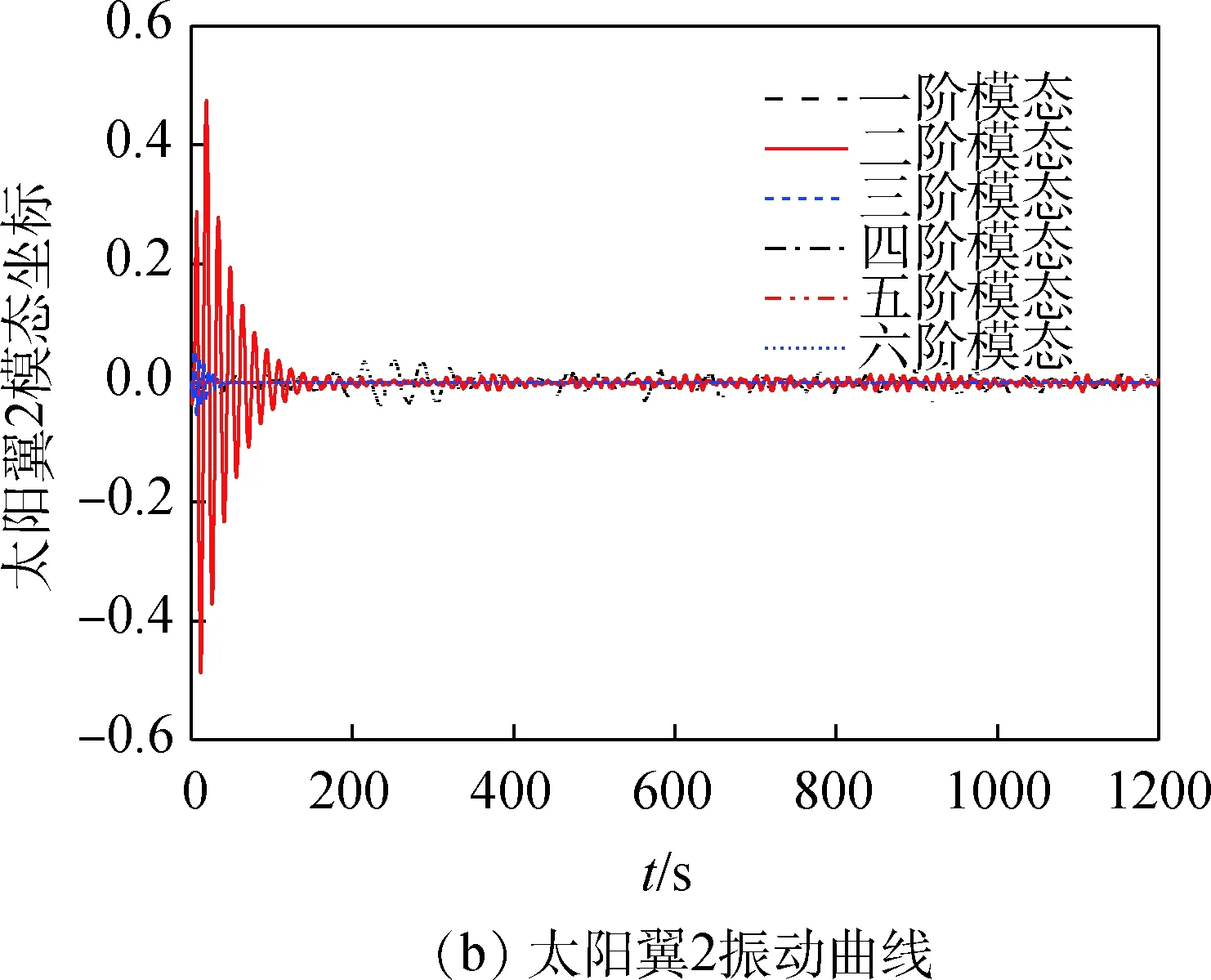
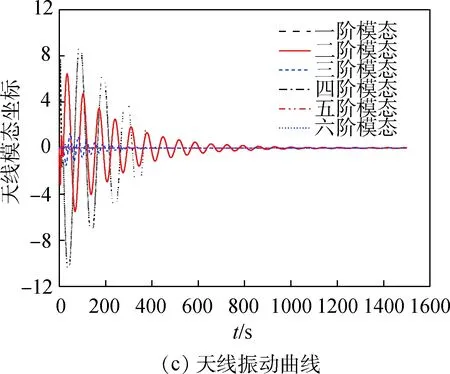
图5 柔性附件振动曲线Fig.5 Vibration curves of flexible appendages
图6是RBF神经网络的姿态估计误差曲线,可以看出RBF神经网络可以在10 s内逼近航天器的动力学模型,估计误差在10-3(°)以内,说明有RBFNN得到的近似线性关系是可信的。
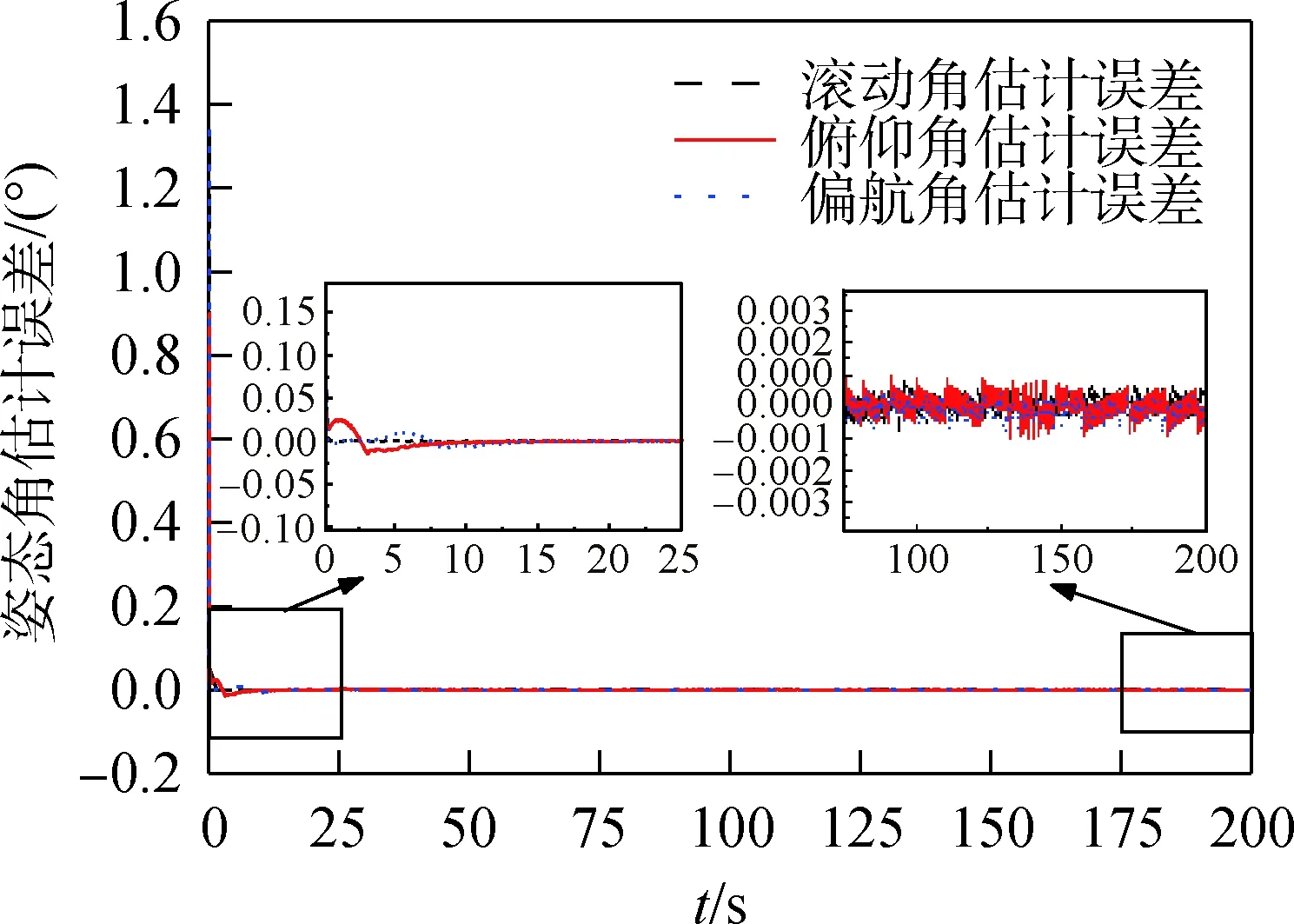
图6 姿态角估计误差曲线Fig.6 Attitude angle estimation
图7是控制力矩曲线,控制力矩在航天器的控制能力范围内,可以实现有效的控制。
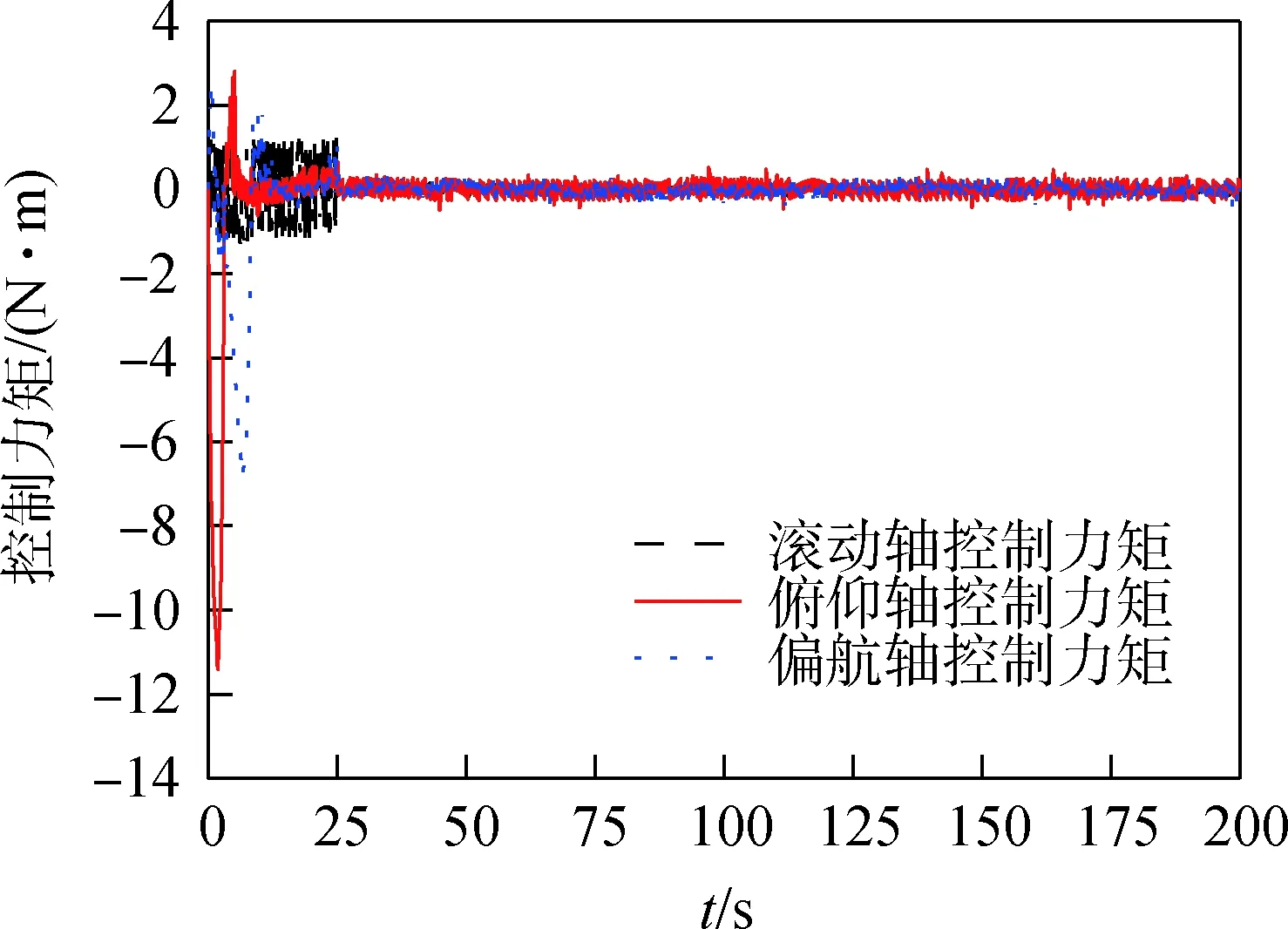
图7 控制力矩曲线Fig.7 Control effort curves
4 结束语
本文针对航天器结构改变影响航天器姿态稳定的问题,对变结构航天器进行动力学建模,在此基础上设计了基于模糊神经网络的自适应滑模控制器,通过对航天器变结构过程无控、参数不变的PID型滑模控制和模糊神经网络自适应滑模控制3种情况的仿真,验证了航天器变结构过程中整星姿态将产生明显扰动,有必要对变结构过程进行姿态控制;模糊神经网络滑模控制器相对于参数不变的PID型滑模控制器,可以使航天器姿态更快收敛到稳定状态,且姿态振荡少,有效提高了控制效果。
未来针对在轨服务航天器等动力学参数有更大不确定性的变结构航天器,需要进一步研究本文控制方法的适用性,并根据实际需求进一步改进现有控制方法。
猜你喜欢
空气动力学学报(2022年4期)2022-08-23
国际太空(2022年7期)2022-08-16
北京航空航天大学学报(2022年7期)2022-08-06
西安交通大学学报(2022年7期)2022-07-19
舰船科学技术(2022年10期)2022-06-17
大电机技术(2022年2期)2022-06-05
黑龙江大学自然科学学报(2022年1期)2022-03-29
国际太空(2022年2期)2022-03-15
航天器工程(2022年1期)2022-02-21
国际太空(2021年11期)2022-01-19