一种电缆隧道巡检机器人的控制系统研究
2020-06-23 08:25胡力广詹威鹏陈腾彪
中国新技术新产品 2020年7期
成 健 胡力广 詹威鹏 陈腾彪 孙 风
(1.深圳供电局有限公司,广东 深圳 518000;2.深圳市深鹏达电网科技有限公司,广东 深圳 518000)
随着机器人技术的飞速发展,机器人已经越来越多地替代传统的人检和物防工作,在减少人们的生命安全隐患的同时,还能有效提升工作效率。机器人在电力行业中的应用越来越普遍,自20 世纪80 年代以来,许多城市逐渐采用地下电缆隧道取代传统的架空线路方式,因而使用电缆隧道巡检机器人将大大节省电力公司的人力、物力和财力,更重要的是,它可以大大减少电缆隧道的恶劣环境对检测人员的伤害。
美国是最早研制出电缆隧道检测机器人的国家。2005年,华盛顿大学的Bing Jiang 开发了一套名为Rangers 的地下电缆检测机器人[1]。机器人两端装有2 个12 V 直流齿轮电机,采用单平台多节模块设计,因而具有稳定的转向能力。此外,由于采用多分段结构,机器人可以携带更多的传感器。机器人平台分为2 个部分,分别用于机器人的控制和传感器的数据处理。该机器人长1.2 m,可沿直径4 cm~8 cm 的电缆行走,跨越沿途遇到的障碍物,沿电缆爬行并识别故障位置[2-3]。
在我国,由于对机器人的研究和开发越来越重视,一些高校和科研院所在隧道机器人研究方面取得了一定的成果。上海交通大学研发了一款索道履带机器人,除了配备红外温度传感器外,还有各种类型的气体传感器。该机器人通过收集和处理这些设备的数据,可以实时了解电缆隧道中有毒气体的浓度,并检测电缆是否损坏。
2012 年,浙江大学研发了一款电缆隧道巡逻机器人。该机器人具有自主检测、应急处理、远程监控等功能,可连续工作3.5 h。此外,它还配备了红外摄像机和温度、气体传感器以及其他感应器,能够实时监测隧道内的异常情况、温度和有害气体,并将隧道内的情况实时上传到监测中心。因此,机器人可以代替人工巡检,有效减少人员伤亡,极大地提高了电缆隧道巡检的效率。
履带式机器人具有结构简单、越障性能好等优点,在电缆隧道检测方面具有巨大的应用潜力。此外,可变式履带移动机器人的出现,进一步提高了履带式移动机器人对于地面环境的适应能力。如果可变式履带移动机器人结合自动适应机制以改变履带体的形状,就可以有效地简化结构和控制系统并降低能耗。此外,如果系统采用模块化的设计方式,拆卸和维修的难度将会大大降低。
结合以上分析,在分析电缆隧道环境特点的基础上,该文设计了一款履带式电缆隧道巡检机器人,其具有3 个特征。1)机器人动作灵活,爬坡避障能力强。在高温、有毒有害气体和其他对人身安全构成威胁的环境下,该机器人仍然能正常巡检并将实时数据传递给监测中心。2)机器人小巧、紧凑且质量轻,便于携带和投放工作,同时涉水及防水性能优异[4]。3)机器人能够采集温度和有害气体浓度信息,通过超声波测距并将这些信息及时传回控制台。
1 机器人结构设计
机器人由履带式底盘、机械臂和摄像机镜头组成。机器人本体采用履带轮臂结构。履带式车轮臂结构是将车轮运动模式、行走模式和轨迹模式相结合的一种新方式。巡检机器人结构图如图1 所示。
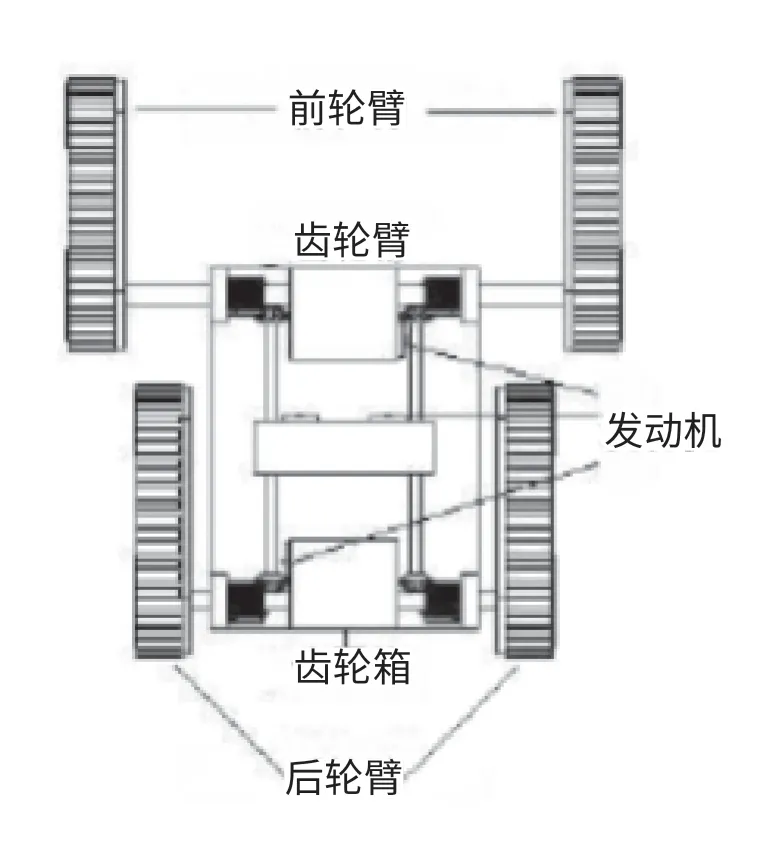
图1 巡检机器人结构图
采用轮臂式结构的机器人兼有轮式、行走式和履带式机器人的优点,可实现爬楼梯、过沟、越障、转向等功能,因而巡检机器人在复杂环境下具有很强的可操作性,二自由度的机械臂负责相机平移和倾斜的升降。可以俯仰旋转,负责收集、监控路径。其具体规格见表1。
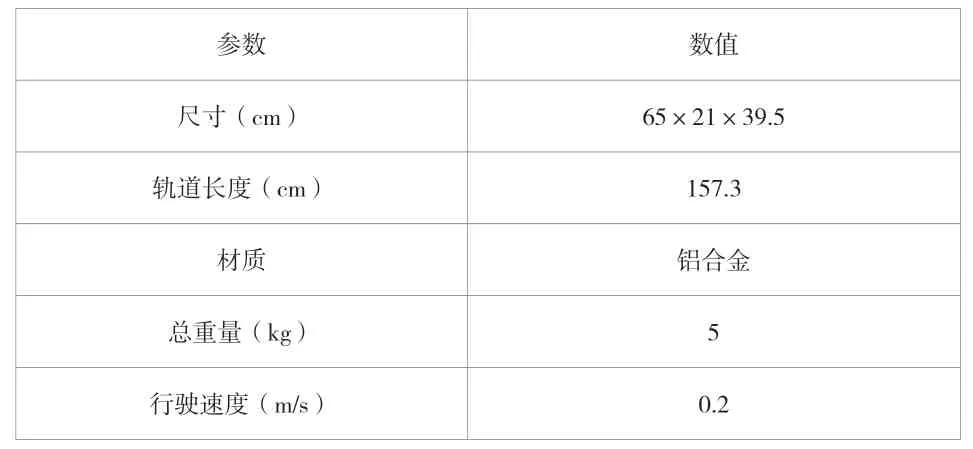
表1 巡检机器人规格参数
轮臂结构采用的结构控制方式为4 个轮臂分成2 组,前2 个轮臂是第一组,后2 个轮臂是第二组,每个轮臂的运动方式一致且互不干扰。4 个轨道也分成2 组,左边2 个轨道是第一组,右边2 个轨道是第二组,每个轨道固定不变且互不干扰。结构控制方式使机器人的运动更稳定且更灵活。
履带结构的应用提高了巡检机器人的越障能力。巡检机器人可以顺利翻越小型障碍物,通过人为操控还可以翻越大型障碍物。此外,履带可以增加摩擦力,使巡检机器人获得更大的驱动力,进而提高了复杂环境的适应能力[5-6]。履带结构由主动轮、履带和托辊组成,采用内齿轮传递。与传统履带底盘相比,简单履带底盘具有更强的角度和台阶高度的适应性,行走过程更加平稳。
2 控制系统设计
电缆隧道环境对巡检机器人的要求主要体现在2 个方面。1)巡检机器人的工作环境中存在大量的未知因素,控制系统必须能够获取可靠的定位信息,对局部环境进行有效识别,从而高效执行动作规划。2)控制系统需要对传感器信息进行实时处理,特别是图像信息,需要对信息进行充分融合。巡检机器人的工作示意图如图2 所示。
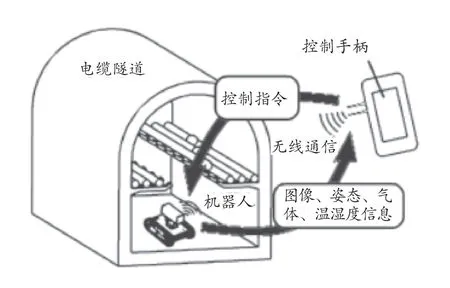
图2 巡检机器人工作示意图
机器人控制系统由3 个单片机处理终端组成,分别为MCU1、MCU2 和MCU3。MCU1 使用SPI 标准串口连接PTR8000 全双工无线通信系统,使其能够与上位机通信并进行数据交换。MCU2 主要控制四通动力电机和三维旋转平台。MCU3 连接温度传感器、超声波测距传感器和气体探测器,将模拟信号转换成数字信号并上传到MCU1。MCU3 控制图像采集和处理系统,其信号通过2.4G 微波发射器上传到上位机。机器人控制系统框图如图3 所示。
为了探测电缆隧道的环境条件,巡检机器人配备了各种传感器。
2.1 温度传感器
机器人借助非接触式红外测温技术可以快速准确地测量出机器人表面的温度,也可用于测量发热物、危险品或难接触物的温度。
2.2 姿态传感器
机器人利用传感器来监测车轮臂的旋转角度,将磁化后的圆柱形磁铁放在齿轮箱的一级轮上,借助霍尔传感器检测出齿轮的转动数。单片机记录从动轮的转动次数并将其转换为臂角信息,使其能够实现精确控制。
2.3 气体探测器
选择合适的传感器作为气体探测器,保证该探测器对于二氧化碳和甲烷具有很高的灵敏度,且待机时间长、稳定性好。
2.4 摄像机
无线红外摄像机借由2 个独立马达可以实现2 个自由度——旋转和俯仰。旋转角度0°~350°,俯仰+350°(相机在0°之上),导航录像带可以用来收集图像。机器人的摄像机采用2.4G 无线发射机超微CCD 芯片,具有优异的信号稳定性和图像抗干扰性能。此外,使用UTV330+TV 盒子来接收无线摄像机传输的图像信号。
2.5 电机驱动电路
采用驱动电路控制直流电机的旋转和旋转校正,设计的驱动方案为使用高功率晶体管驱动直流电机,采用继电器控制电机的转动。该方案能耗低,高效简便并且实用。
2.6 舵机控制
操舵装置由直流电机、减速齿轮装置、传感器以及控制电路组成,用来控制角度和方位,其通过发送脉冲信号来控制电机转动和输出转矩。同时,输出轴上的电位计探测输出轴的转角并且将其转换成电信号,通过比较该电信号和输入轴的转角信号来控制直流电机的旋转反馈。伺服驱动模组采用高功率MOS 管作为动力元件,驱动模块采用PWM 方式进行直流电机的速度控制。
3 实验
在南方电网示范工程隧道,对机器人进行了行走实验, 将巡检机器人放置于隧道的入口处,进行上电并建立起无线通信连接,发出指令之后控制机器人运行。在巡检机器人沿隧道行走的过程中,使用微型红外摄像头以及红外测距传感器对前方障碍情况进行检测,如果情况需要,还应通过云台转动的方式对拍摄角度进行调整。实验数据有以下3 个。1)在遥操作模式下,机器人顺利通过隧道,未出现危险情况,耗时约42 min。2)自主行走时,机器人可以顺利行进300 m,未出现危险情况,耗时约15 min。3)机器人能够顺利自主爬越高88 mm 的门槛,无故障。
4 结语
该文基于现有技术的实际应用,设计了一种微型电缆隧道巡检机器人,介绍了其主要功能、机械结构和控制系统。在机械结构方面,履带轮臂结构设计使巡检机器人的运动性能更优异,使其更适用于诸如电缆隧道的复杂环境。在控制系统方面,控制电路结构简单、抗干扰能力强、稳定性强。实验结果证实,微型巡检机器人能够满足电缆隧道环境的工作要求。

图3 巡检机器人控制系统框图
猜你喜欢
中国石油石化(2021年8期)2021-03-30
石油化工建设(2019年6期)2020-01-16
趣味(数学)(2019年12期)2019-04-13
小读者(2019年24期)2019-01-10
小天使·四年级语数英综合(2016年11期)2016-11-29
中国科技信息(2016年6期)2016-08-31
中国科技信息(2015年23期)2015-11-07
中国交通信息化(2015年7期)2015-06-06
橡胶工业(2015年4期)2015-02-23
自动化博览(2014年4期)2014-02-28