基于模糊控制的分段洗出算法
2020-06-22 13:15姚通甘屹孙福佳
软件导刊 2020年5期
关键词:模糊控制
姚通 甘屹 孙福佳


摘 要:洗出算法優劣对汽车模拟器运动模拟逼真度具有重大影响。针对经典洗出算法模拟逼真度不高以及滤波器参数固定的问题,提出一种优化方法。运用人体主观相等点理论,对输入的加速度信号进行分段处理,同时将模糊控制理论应用到经典洗出算法中,实时确定加速度高通滤波通道、加速度低通通道与角速度高通滤波通道中滤波器的自然频率,最后在SIMULINK中对优化的洗出算法进行仿真与分析。仿真结果显示,优化后的洗出算法相比经典洗出算法感知误差降低了68.4%,该结果表明优化后的洗出算法可以提高模拟逼真度。
关键词:汽车模拟器;洗出算法;主观相等点;模糊控制;SIMULINK仿真
DOI:10. 11907/rjdk. 191820 开放科学(资源服务)标识码(OSID):
中图分类号:TP312文献标识码:A 文章编号:1672-7800(2020)005-0056-05
0 引言
汽车模拟器是模拟驾驶的重要设备,其接收汽车加速度、角速度等信号,经过坐标变换、滤波及补偿等方法,将信号输入到六自由度运动平台,运动平台作出相应动作,令使用者获得身临其境的感受。由于六自由度运动平台运动空间有限,接收的信号完成一次相应动作之后,运动平台需要以低于人类感知的动作回到平衡位置[1],为下次运动作准备。因此,汽车模拟器模拟的逼真与否将严重影响使用者体验。
为了给使用者提供更加真实的驾驶体验,需要采用洗出算法。经典洗出算法具有结构简单、运算速度快及参数调节方便等特点,因而得到了广泛应用,但仍存在一定缺点。为此,很多学者对其进行了改进。如王辉、李儒周等[2]对经典洗出算法中加速度高通通道进行信号补偿,解决了速度信号丢失与相位误差暗示的问题;洪振宇等[3]提出一种适用于两转一移并联运动平台的洗出算法;罗竹辉等[4]对汽车模拟器的高幅值输入信号进行缩放处理,将低幅值输入信号乘上一个时变比例系数,以提高模拟逼真度;Asadi等[5]采用模糊控制对经典洗出算法中的3个通道进行补偿;Miunske等[6]采用新的倾斜协调通道,以减少算法对人体的负面影响。
虽然经典洗出算法已得到广泛应用,但其存在模拟逼真度不高以及滤波器参数固定的问题,严重影响了使用者体验。针对这些问题,运用人体主观相等点PSE[7](Point of Subjective Equality)理论,对输入的加速度进行划分,采用参数补偿方法提高模拟逼真度。同时采用模糊控制方法,实时选择滤波器的自然频率,以解决经典洗出算法中参数固定的缺点。最后利用SIMULINK对优化后的算法进行建模仿真,验证该优化方法的有效性。根据优化后的数据可知,该优化方法具有一定参考价值。
1 经典洗出算法
经典洗出算法由坐标变换环节、滤波环节、倾斜协调环节等组成[8]。其中,坐标变换环节使用旋转变换矩阵[LS]和欧拉角变换矩阵[TS]将六自由度运动平台的上平台动坐标系转换为下平台参考静坐标系。其中旋转变换矩阵[LS]为:
滤波环节包括:加速度高通滤波通道、加速度低通滤波通道和角速度高通滤波通道[9]。经典洗出算法的加速度高通滤波通道将输入的加速度信号先经过坐标变换矩阵[LS],再通过高通滤波器得到瞬时加速度,将瞬时加速度经过积分变换得到平台位移,该通道滤波器传递函数为[10]:
在式(3)中,[abX]、[abhX]表示滤波前后的加速度信号,[ξahx]、[ωahx]为滤波器的阻尼比和截止频率,[ωx]为一阶环节响应频率,一般取1。
加速度低通滤波通道将输入信号洗出为持续加速度信号,用来模拟持续加速度。输入信号先经低通滤波器,再经过倾斜协调,最后经过幅度限制,将其输出幅值限制在低于人体感知门限内。该通道滤波器传递函数为[10]:
2 人体感知模型
人体利用前庭器官感知运动,前庭器官中的耳石和半规管分别用于感知运动中纵向、侧向与垂向的比力[11]及角速度变化。人体能够感受到的比力[fAA]信号是相对加速度,即平移加速度减去重力加速度。
心
3 分段洗出算法
3.1 人体主观相等点理论
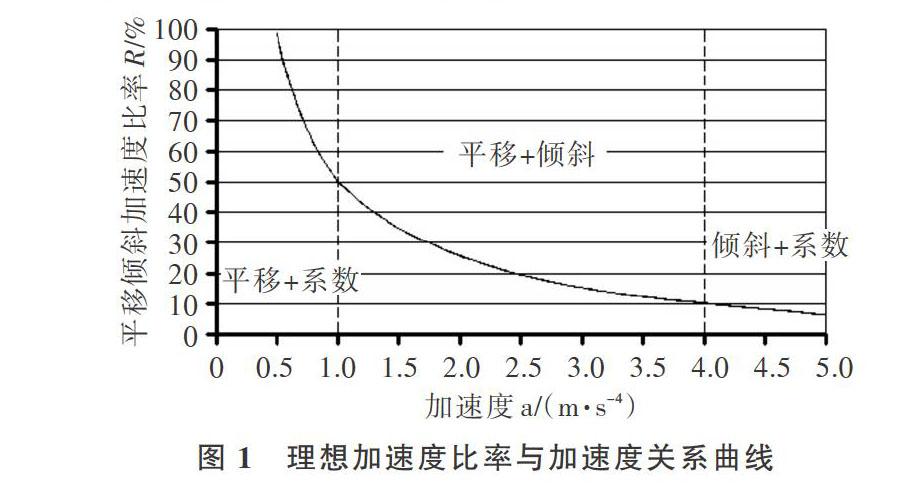
人体前庭器官与运动信号在感知上的相互耦合,以及洗出算法中输入信号处理的不协调,是影响汽车模拟器逼真度的主要原因[14]。针对洗出算法中对低频信号与高频信号处理不协调的问题,运用人体主观相等点(PSE)理论有利于解决该问题。人体主观相等点理论指出人体判断运动模拟逼真与否和驾驶者感受到的平移加速度与倾斜协调产生的加速度之间比率大小有关。当驾驶者感受到的加速度比率过大或过小,都会出现模拟失真现象。图1为理想加速度比率与加速度关系曲线。
由图1可以看出,人体感受到的加速度可分为3部分:当加速度0<[a]≤1时,平移加速度占50%以上,此时平移加速度起主要作用,需要增加一个系数提高模拟逼真度;当加速度1<[a]<4时,平移和倾斜加速度共同作用,不需要添加系数;当加速度[a]≥4时,倾斜协调加速度起主要作用,此时也需增加一个系数提高模拟逼真度。
3.2 分段洗出算法
经典洗出算法中滤波器的主要参数为阻尼比和自然频率,其数值相对固定,因而会影响模拟驾驶逼真度[15]。研究发现,滤波器阻尼比对输出信号影响较小,自然频率变化对输出信号影响较大,因此可以只对滤波器的自然频率进行调节[16]。
针对经典洗出算法存在的模拟逼真度不足以及滤波器参数固定问题,本文将人体主观相等点理论以及模糊控制方法运用到经典洗出算法中,提出分段洗出算法。该算法采用人体主观相等点理论,对输入的加速度作分段处理,并采用模糊控制方法实时确定滤波器的自然频率。分段洗出算法具有以下特点:
(1)对输入的加速度信号进行分段处理,将加速度较低的部分(0<[a]≤1)从信号中分离出来,先经坐标变换,再经高通滤波器滤波,最后加入系数K1进行积分,得到运动平台中心的位移信号。
[13] YOUNG L R,OMAN C M. Model for vestibular adaptation to horizontal rotation[J]. Aerospace Medicine,1969,40(10): 1076-1080.
[14] GROEN E,MSV V C,HOSMAN R. Psycho-physical thresholds associated with the simulation of linear acceleration[J]. Arquivos Brasileiros De Cardiologia,2013,39(2):129-133.
[15] 孙薛鹏,卢颖,闫思齐. 基于改进模糊控制的飞行模拟器洗出算法研究[J]. 机电工程,2017,30(10):1220-1223.
[16] 王辉,朱道扬,傅孝靖. 飞行模拟器洗出算法优化设计及仿真[J]. 系统仿真学报,2017,29(2):418-423.
[17] ASADI H,MOHAMED S,NAHAVANDI S. Incorporating human perception with the motion washout filter using fuzzy logic control[J]. IEEE Mechatronics Transactions, 2015, 20(6):3276-3284.
[18] 李士勇. 模糊控制·神经控制和智能控制理论[M]. 哈尔滨:哈尔滨工业大学出版社,1998.
[19] WU J,HE F J. Development and implementation of a washout algorithm for a 6-dof motion platform of flight simulator[J]. International Journal of Research in Engineering and Science,2015,3(7) : 8-14.
[20] 魏春雨,周曉军,魏燕定,等. 基于Vortex的6自由度平台洗出运动仿真[J]. 浙江大学学报(工学版),2012,46(8):1390-1396.
[21] 董彦良,许彩霞,唐建林,等. 6 自由度平台的 Washout滤波器设计及试验研究[J]. 机械工程学报,2010,46(3):53-58.
(责任编辑:黄 健)
猜你喜欢
成都信息工程大学学报(2021年6期)2021-02-12
电子制作(2019年16期)2019-09-27
电源技术(2017年1期)2017-03-20
环境科技(2016年5期)2016-11-10
西南交通大学学报(2016年3期)2016-06-15
电子制作(2016年21期)2016-05-17
通信电源技术(2016年5期)2016-03-22
西北工业大学学报(2015年1期)2016-01-19
池州学院学报(2015年3期)2016-01-05
电源技术(2015年11期)2015-08-22