飞机舵机电动伺服系统复合控制方法研究*
2020-06-22 10:30:02朱国威姜梦馨门若霖刘晓琳杨洪利
网络安全与数据管理 2020年6期
朱国威,姜梦馨,林 丛,门若霖,刘晓琳,王 楠,杨洪利
(中国民航大学 电子信息与自动化学院,天津300300)
0 引言
飞机舵机是调整飞行姿态的重要组成部件之一,其优良性能是确保飞机安全稳定飞行的关键。在实验室条件下,通常使用伺服系统模拟舵机在飞机飞行过程中所受到的各种力载荷的变化情况,从而将经典的自破坏性全实物试验转化为实验室条件下的预测性研究[1]。 按照载荷施加的方式,飞机舵机伺服系统可分为电液伺服和电动伺服两种[2]。电液伺服系统因机械结构复杂,输出能力强,只适用于大转矩工作场所。电动伺服系统可以输出较小的加载力,不仅加载梯度易于调节,而且更加符合飞机舵机对非线性力载荷的模拟要求[3]。 因此,为了满足飞机舵机的测试需求,飞机舵机电动伺服系统得到越来越广泛的关注。
虽然飞机舵机电动伺服系统有效地改进了飞机舵机的测试方式[4],但是由于伺服系统连接轴通过连接机构与被测舵机相连,作为承载对象的舵机在受到力矩加载的同时也将会按照位置指令进行运动,由此所发生的位移不同步现象使得系统在启动和运行过程中产生多余力矩[5]。 多余力矩的存在会严重影响系统加载精度、响应速度和控制性能[6]。因此,如何抑制多余力矩干扰,实现系统对飞机舵机在实际工作过程中所受力载荷的真实模拟能力,已成为亟待解决的研究课题。
1 飞机舵机电动伺服系统的结构组成与工作原理
飞机舵机电动伺服系统主要由控制柜和台体两部分构成,如图1 所示。其中,控制柜由工业控制计算机、控制模块和电源组成。 台体由加载电机驱动器、直流力矩电机、力矩传感器、缓冲弹簧、旋转编码器、舵机组成。

图1 飞机舵机电动伺服系统结构图
飞机舵机电动伺服系统的工作原理如图2 所示。 由控制柜设置加载力指令。 利用力矩传感器获得飞机舵机的输出力信号,与加载力指令信号进行比较得到误差信号,经过调理放大、滤波后输出给直流力矩电机。 通过直流力矩电机产生加载力,经由缓冲弹簧和旋转编码器加载到飞机舵机上。

图2 飞机舵机电动伺服系统工作原理图
2 飞机舵机电动伺服系统数学模型
(1)直流力矩电机数学模型
在理想条件下,直流力矩电机电枢可以等效为一个线性电阻和一个电感元件相串联。 因此,可以得到直流力矩电机电枢的电压平衡方程为:

式中,Um为电机两端电压,Em为电机反电动势,L为回路总电感,I 为电路电流,R 为回路总电阻。
反电动势Em与电机角速度ωm成正比

式中,θm为电机角速度;Ke为反电动势系数。
根据力矩平衡关系,可以得到:

式中,KT为电机的力矩系数;TL为负载力矩;Jm为电机电枢转动惯量;Bm为电机阻尼系数。
联立式(1)~式(4),并进行拉氏变换,可得:

联立式(5)~式(7)可得:

根据式(8)可以得到直流力矩电机的数学模型如图3 所示。
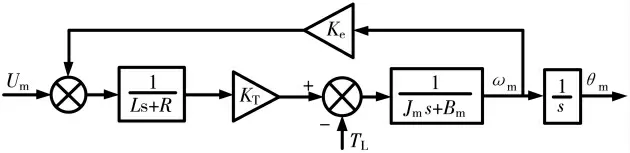
图3 直流力矩电机数学模型
因此,直流力矩电机输出力矩与控制电压及电机输出角度的关系为:

(2)缓冲弹簧数学模型
力矩传感器位于直流力矩电机与飞机舵机之间,其刚度较大,若不加入缓冲机构,不仅会对力矩传感器造成损坏,而且会降低系统加载精度。为此,本文通过增加缓冲弹簧来对传统的飞机舵机电动伺服系统结构进行改进。 缓冲弹簧两端力矩随着扭转角度增大而线性上升,在起到缓冲作用的同时还能够滤除力矩高频分量,从而提高系统加载精度。
在忽略缓冲弹簧本身质量和力矩传感器弹性的前提下,近似认为缓冲弹簧传递的力矩与扭转角度之间存在线性比例关系:

式中,KL为缓冲弹簧刚度系数;θr为舵机运动角度。
(3)力矩传感器数学模型
系统输入是加载梯度和伺服系统指令力矩的乘积,即:

式中,Ti为伺服系统的指令力矩;Kg为加载梯度。
(4)加载电机驱动器数学模型
加载电机驱动器是具有饱和特性的线性放大器,将电机控制信号进行幅值与功率的放大,从而驱动直流电机工作。 忽略模型非线性因素后,线性功放增益为电机两端电压与系统输入信号之比,即

结合式(1)~式(12)可以得到飞机舵机伺服系统整体数学模型如图4 所示。

图4 飞机舵机伺服系统整体数学模型
由此可以得到系统输入与输出之间的传递函数为:

3 飞机舵机电动伺服系统智能控制方法设计
本文提出一种基于BP 神经网络和控制补偿的飞机舵机电动伺服系统复合PID(Proportion Integral Derivative)控制方法,其控制结构如图5 所示。
飞机舵机多余力矩的超前性能会对飞机舵机伺服系统输出端造成直接影响。 为了有效地抑制多余力矩干扰, 使系统能够快速准确地输出加载力,如何设计系统控制方法是关键。 考虑到飞机舵机电动伺服系统是一个非线性、参数时变的复杂的被动式力伺服控制系统,传统PID 控制无法满足系统对稳定特性、加载精度、响应速度、跟踪能力等技术指标的要求,本文的创新之处包含以下两点:
(1)采用BP 神经网络PID 控制代替传统PID 控制,对控制器参数进行实时整定,克服系统参数时变因素的影响。
(2)采用控制补偿方法,研究与系统控制性能紧密相关的舵机角速度、力矩速度等重要信息的控制策略,提升系统实时控制水平。

图5 飞机舵机电动伺服系统控制系统框图
3.1 基于BP 神经网络的PID 控制器参数整定
PID 控制器的比例、积分和微分参数是决定整个控制系统性能的重要指标[7]。传统PID 控制器常利用阶跃函数信号或正弦函数信号对参数进行设计,以实现对被控对象的闭环控制。 该方法缺乏灵活性,仅适用于线性系统,无法满足飞机舵机电动伺服系统参数时变及非线性因素的影响。
随着智能控制算法在非线性系统控制方面的不断发展,BP 神经网络以其结构简单、非线性处理能力强、学习速度快等优势逐步受到关注。 BP 神经网络是一种基于大脑神经元对外界刺激信号的即时反应的智能模型[8],为参数时变的飞机舵机电动伺服系统实施神经网络控制策略提供了可行性。 基于BP 神经网络的PID 控制器控制原理图如图6 所示。

图6 基于BP 神经网络的PID 控制器控制原理图
PID 控制算法为:

式中,u(k)为输出信号;e(k)为误差信号;Kp、Ki、Kd分别为比例、积分、微分参数。
将Kp、Ki、Kd视为依赖于系统运行状态的可调系数,将算法描述为:

式中,f 为与Kp、Ki、Kd等有关的非线性函数。
PID 控制器参数自动整定过程描述如下: 首先将学习样本提供给神经网络,然后把神经元的权值从输入层经过各个隐含层传播到输出层,最终输入响应到达网络输出层,此时算法检测到目标输出与实际输出之间存在一定的误差,从输出层向输入层的方向修正连接权值。 随着修正的不断进行,多次的迭代学习,目标输出与实际输出的误差也不断减小,以达到网络收敛的目的。
3.2 控制补偿环节设计
基于BP 神经网络的PID 控制器虽然解决了传统PID 控制器实时参数难以整定的问题,但是会使控制器输出超调量增大,降低系统快速性与稳定性,仍然无法满足当代航空业的高性能要求,因此引入角速度前馈与力矩速度反馈的控制补偿环节。
在电动伺服系统中,舵机自身的主动运动将对系统产生很强的位置干扰并影响频宽,因此在前馈通道中采用舵机角速度指令作为前馈控制器输入,该方法不仅可以抑制系统自身结构所带来的干扰,而且能够对输入端噪声进行滤波,改善系统稳定性。
同时, 由于电动伺服系统是一个力矩闭环控制系统, 即将力矩变化速度作为反馈信号。而现实情况下力矩变化速度不易测定,考虑到以系统内部信号作为反馈量,可以避免相位滞后,并使系统幅频特性趋于直线而保证信噪比,因此在反馈通道中采用与力矩变化速度存在线性关系的输出力矩角速度作为反馈量。 该方法不仅可以避免相位滞后,而且能够提高系统的实时性和抗干扰性。
系统控制补偿环节工作原理如图7 所示。
4 仿真实验与结果分析
利用MATLAB 软件进行仿真实验,验证本文所提出方法的可行性和有效性。
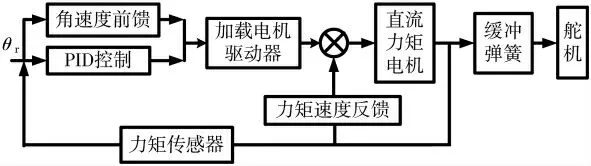
图7 控制补偿环节工作原理图
4.1 多余力矩抑制实验结果与分析
在多余力矩抑制实验中,多余力矩表现为在飞机舵机电动伺服系统的参考输入指令为0 N·m 时伺服系统的输出力矩。 根据飞机舵机工作频率为1~20 Hz,设定舵机位置信号为10 Hz,幅值为3 N·m的正弦信号,调节至系统稳定后结合实际应用情况,初始选定的PID 控制器参数为Kp=2,Ki=8,Kd=0.000 5。 同时,根据系统特性,本文采用三层BP 神经网络结构,其中输入有3 个,分别是期望值、实际值和偏差值;隐含层为5 层;输出有3 个,分别对应比例系数、积分系数、微分系数。 选定BP 神经网络的初始参数为迭代次数N=300,学习速率η=0.04,惯性系数α=0.05。
比较传统PID 控制、基于BP 神经网络的PID 控制与基于BP 神经网络和控制补偿的复合PID 控制下系统所产生的多余力矩,仿真实验结果如图8所示。

图8 系统多余力矩抑制仿真实验结果
由图分析可知,在传统PID 控制下,系统出现较强的振荡性,多余力矩大小瞬间增至2.23 N·m,幅差为12.6%,系统稳定性较差。未加控制补偿,在仅基于BP 神经网络的PID 控制下,系统虽然多余力矩抑制效果明显,但是振荡明显,在0.19 s 才趋于稳定。而在复合PID 控制下,系统振荡较小,多余力矩最大值仅为0.36 N·m,幅差为7.3%,系统稳定性和加载精度较强。 仿真实验结果表明,基于BP 神经网络和控制补偿的复合PID 控制方法可以显著提升系统多余力矩抑制能力。
4.2 加载力矩跟踪实验结果与分析
在加载力矩跟踪实验中,设定舵机指令为幅值3 N·m,频率8 Hz 的正弦信号时,比较传统PID 控制、基于BP 神经网络的PID 控制与基于BP 神经网络和控制补偿的复合PID 控制下的加载力矩,仿真实验结果如图9 所示。
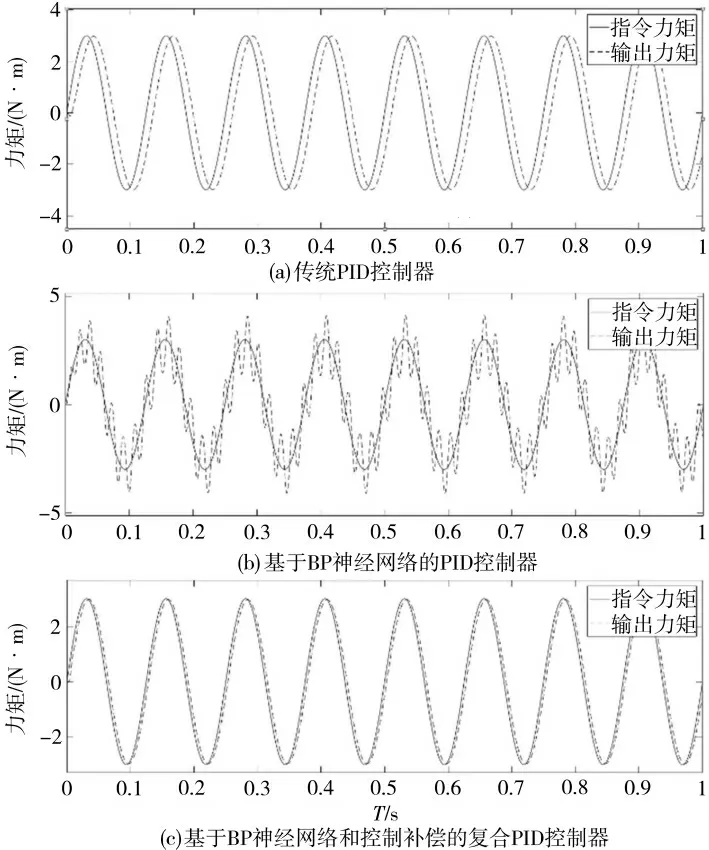
图9 系统加载力跟踪仿真实验结果
由图9 分析可知,在传统PID 控制下,系统幅差为0.98%,相差为3.47°,加载力跟踪性能较差。 在基于BP 神经网络的PID 控制下,相差为0.74°,振荡比较明显。而在复合PID 控制下,系统幅差为0.32%,相差为0.20°,满足双十指标的要求,系统快速性和稳定性得到显著提高。 仿真实验结果表明,基于BP神经网络和控制补偿的复合PID 控制方法具有更好的加载力跟踪效果。
5 结论
为了解决飞机舵机电动伺服系统多余力矩干扰严重的问题,本文提出了基于BP 神经网络和控制补偿的复合PID 控制方法。 首先,根据系统的结构组成及工作原理,通过建立直流力矩电机、缓冲弹簧数、力矩传感器和加载电机驱动器的数学模型,进而构建了系统整体的数学模型。 然后,利用控制补偿方式,重建控制器结构功能,结合BP 神经网络的PID 控制器参数整定、角速度前馈与力矩速度反馈的控制策略。 最后通过仿真实验验证了该方法不仅可以有效提高系统的响应速度和加载精度,而且在一定程度上抑制了多余力矩干扰。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02 01:59:46
自动化学报(2019年6期)2019-07-23 01:18:36
测控技术(2018年12期)2018-11-25 09:37:44
电子制作(2018年1期)2018-04-04 01:48:14
制造业自动化(2017年2期)2017-03-20 14:26:18
制造业自动化(2017年2期)2017-03-20 14:26:08
光学精密工程(2016年6期)2016-11-07 09:08:02
装备制造技术(2016年7期)2016-09-26 09:21:36
制造技术与机床(2016年3期)2016-08-31 04:02:37
北京航空航天大学学报(2016年4期)2016-02-27 06:32:11