
移动机器人无线阵列式充电系统
2020-06-21 13:26王晓龙邓磊刘恒
科学导报·学术 2020年71期
王晓龙 邓磊 刘恒

【摘 要】本项目设计的是一款基于变磁耦合谐振的M×N阵列式移相控制的中功率无线充电系统,可应用于机器人、无人机等产品,特别是针对移动机器人的无线充电。磁耦合谐振式无线充电具有传输距离远,辐射较低的特性,但此种充电方式效率较低,且发射功率较低。所以本团队提出一种变拓扑磁耦合谐振通过移相控制的新型M×N阵列式线圈的结构,以提高磁耦合谐振式无线充电的传输效率和传输功率,具有很高的实用价值。
【关键词】无线充电;变磁耦合谐振;移相控制的新型M×N阵列式线圈
引言
近年来无线充电技术发展迅速,并广泛应用于各类电器设备中。其中磁谐振式无线充电兼具安全、传输距离较远等优势,成为了国内外研究的焦点。但磁谐振无线充电目前仍存在传输效率不高,单对线圈功率不高,磁场分布不均,电流振荡会对电路产生损害等问题。
对此本项目意在设计一款利用阵列式线圈结构提高磁耦合谐振式无线充电传输效率和功率的系统。同时减小系统运行所产生的电流振荡损耗和系统静损耗,提高无线充电的能量传输效率和安全性。
1.硬件方案
移动机器人无线阵列式充电系统其硬件部分主要由二大部分构成:
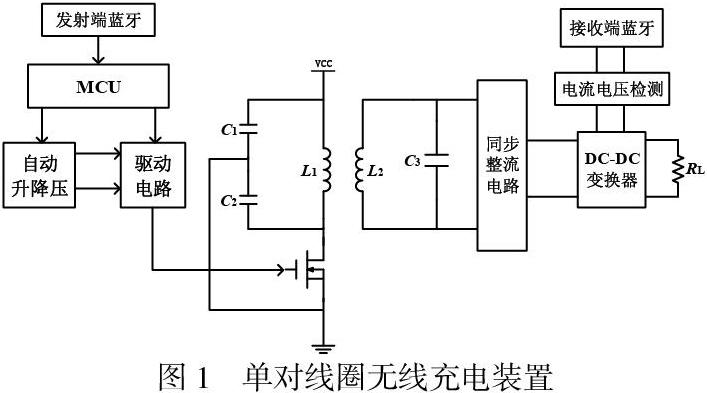
(1)单对线圈无线充电基本结构。单对线圈无线充电装置整体结构框图如下图1,本项目在傳统PP型谐振电路发射端拓扑上进行变换,在此基础上制作新型无线充电装置,可以提高系统效率。无线充电发射端由自动升降压电路、发射端蓝牙模块、高频开关管电路、以及开关管的驱动电路组成;接收端由同步整流电路、DC-DC变换器、电流电压检测电路[1]、接收端蓝牙模块组成;两端的蓝牙模块起到连接信息交流的作用。
(2)M×N阵列式线圈无线充电整体结构[2]。M×N阵列式线圈无线充电是在单对线圈的结构之上进行改进,利用阵列线圈的串并联提高功率装置,该无线充电为中功率充电装置[3]。中功率无线充电装置结构如图2,分为发射端和接收端,通过蓝牙模块传递信
2.控制方案
相位控制。M×N发射端阵列采用单独的发射端模块,对于这M×N个发射端采用移相控制的方式发射传输能量。其移相角度根据发射端模块的数量决定。对于M×N个发射端,其每一个发射端移相角度为
为叙述方便,以3×3阵列的为例,说明此M×N无线发射端阵列的控制方式。对于3×3的阵列无线电能发射端,其移相角度为40度,以中心发射端E为起始点,A为终点。在一个控制周期内,以发射端E为相位零点,经过D、G、H、I、F、C、B、A时PWM相位依次延迟40度,最终到达发射端A延迟360度。如此循环反复,发射能量,通过移相的控制方案,达到减小电源电流峰值、改善电源电流波形,同时减小系统的无功损耗,提高的无线充电效率的目的[4]。其发射框图路径如图3所示。
在第二个PWM控制周期内,以发射端E为起点,假定此时发射端E的PWM相位为0度,经过H、I、F、C、B、A、D、G时PWM相位依次延迟40度,最终到达发射端G延迟360度。其发射框图路径如图4所示。
在第三个PWM控制周期内,以发射端E为起点,假定此时发射端E的PWM相位为0度,经过F、C、B、A、D、G、H、I时PWM相位依次延迟40度,最终到达发射端I延迟360度。其发射框图路径如图5所示。
在第四个PWM控制周期内,还是以发射端E为起点,假定此时发射端E的PWM相位为0度,经过B、A、D、G、H、I、F、C时PWM相位依次延迟40度,最终到达发射端C延迟360度。其发射端框图路径如图6所示。
3.结语
基于磁耦合谐振式无线充电方式具有作用距离较远、安全稳定的优势,是近年来研究的焦点,本方案利用M×N阵列式线圈,采用M行N列LC并联谐振增大无线充电的功率,通过电源DC/ DC模块对电能进行变换,通过电路进行整流滤波使电能稳定输入,利用阵列式LC发射模块和接收模块通过磁耦合谐振接收和发送电能,利用蓝牙模块进行信号控制传递,并对电流电压进行检测动态改变电压确保充电稳定高效运行,通过相位控制提高充电效率,最终可实现提高磁谐振式无线充电的效率和功率,清晰严密具有可行性。
参考文献:
[1]张彬,罗全明.全桥LC-LC串并联谐振逆变器小信号建模及闭环设计[J/OL].电源学报:1-22[2021-05-03].
[2]徐宽茂,张钊锋.一种新型的磁谐振式无线充电阵列发射机制[J].电子器件,2018,41(01):172-176.
[3]杨成蒙,孙培德.一种位置自由的低功耗无线充电系统[J].电子设计工程,2014,22(04):124-126..
[4]张志文,范威,伍莎莎,王雄,刘军,孙树波.基于磁共振无线电能传输系统中三种结构线圈空间磁场分布研究[J].计算机应用与软件,2016,33(12):75-79+135.
基金项目:
重庆理工大学学生科研立项科技发明制作课题(KLB20011).
(作者单位:重庆理工大学电气与电子工程学院)
