
平面移动式停车设备的设计方法
2020-06-21 08:17:44余秋英
机电工程技术 2020年5期
余秋英
(广州广日智能停车设备有限公司,广州 511447)
0 引言
近年来,汽车保有量逐年增高,导致停车位不能满足要求[1]。中国作为全球第一大汽车市场,相应带动了停车设备行业的迅猛发展,市场需求每年以25%~28%趋势递增,机械式停车设备具有极好的发展前景[2]。安全性、停车密度、停车效率、成本、停车体验作为五大核心要求为机械式立体停车库的研发带来了发展机遇[3]。立体停车库具有占地小、自动化程度高、安装拆卸方便、空间适应性强等显著特点[4]。在寸土寸金的城市中心区域,不同建筑规划用于停车区域的空间往往存在较大差异,立体停车库虽然种类较多,出于性价比的考虑,许多大类的智能停车库不适用于偏定制化的客户需求。平面移动式停车设备多用于多样化的商业建筑,如商业区、学校、机场、火车站等地方,具有较强的可扩展性[5]。目前,平面移动类停车设备的开发项目虽然较多,但对于集成升降机、搬运器、电气控制以及结构受力分析的总计设计方法探讨并不多见。综合考虑,结合某一大型商业综合体平面移动式停车库开发项目,本文归纳了一种平面移动式停车设备的设计方法,既满足高密度停车的市场需求,又为今后该类停车库设计开发提供参考依据。
1 平面移动式立体停车设备
平面移动式停车设备是根据自动仓库原理,利用成套搬运设备、存取交换设备、出入口设备,通过安全检测系统、电气控制系统将汽车进行库内叠放式存储的自动化停车设备,是集声、光、电为一体的大型密集型停车系统[6]。升降机作为平面移动式停车设备的升降运输模块,其搭载着横移台车、搬运器、车辆在库内进行换层运行,将横移台车运送至停车层及出入口层[7]。入库时,司机只须将车辆开至出入口停车平台,停好车、刷卡,系统发出指令,库内成套搬运设备及存取交换设备便将车辆由出入口搬运至库内停车位上。
智能停车设备的存取交换技术决定了拾取与放置车辆的方式,成套搬运技术决定了不同路径输送车辆的方式,电气控制技术决定了识别与记忆车辆的方式。平面移动式停车设备可与远程监控系统、车场引导系统、寻车系统、停管收费系统相融合,形成各异化的平面移动式停车设备库。
2 平面移动式停车库设计要点
2.1 项目概述
某综合体规划地面1~3层为商用空间,4~7层为智能停车库。为了最大限度利用现有空间,保证车辆存取的综合效率,低成本、高空间利用率的平面移动式立体停车库成为优选方案。适合于短巷道、中高层停放车辆的车库方案如图1所示,商用的架空车库设置方案如图2所示。当同一巷道相对设置两部中置升降机时,采用系统联控方式或独立控制方式。
2.2 总体方案规划
巷道长度L由升降机端L1、停车列数M、停车位宽L2、建筑柱数N、建筑柱宽L3、车位与建筑柱间隙L4、横移车运行端部L5等决定。巷道长度L=L1+L2×M+L3×N+2L4×N+L5。
车库由若干停车层、出入口层组成,中置升降机设置于巷道端部,井道垂直贯通,井道与巷道水平联通。结合用地及系统能力确定停车层数、停车位数、出入口、最大垂直行程、最大水平行程等参数。

图1 短巷道车库方案图

图2 含架空层车库方案图
2.3 库内输送能力及出入口
库内输送能力主要取决于升降机垂直运行时间t1、升降机平层时间t2、横移台车水平运行时间t3以及LAT智能搬运器纵向运行及存取时间t4。库内单程输送时间Ta1=t1+t2+t3+t4。
车库门开启时间t7,司机开车至停车平台、通过安全检测、司机下车并离开入口的时间t8,车库门关闭t7可以并行不予计算,停车平台运行t9,库内门开启时间t10,满足LAT智能搬运器进入停车平台取车条件时,上述时间总和Tb1=t7+t8+t9+t10。
智能搬运器驶至入口处停车平台上搭载车辆后,返回横移台车上,根据系统指令,升降机、横移台车、智能搬运器将车辆进行空间输送、存置在库内任意停车位上,单程时间Ta1;司机将车辆停至入口、安全确认,车库门开启,LAT智能搬运器方可进行取车,时间Tb1;在满足车位数需求条件下,合理平衡库内输送能力及出入口能力,尽可能让出入口能力Tb1不大于库内搬运能力Ta1,即Tb1≤Ta1。出入口是人与车辆交换的转换区,需考虑司机停车便捷性,减少人为停车时间,提高车库系统运行效率。可设置贯通式入口、出口,错层式入口、出口等。
2.4 升降机
升降机搭载横移台车、LAT智能搬运器以及车辆进行垂直换层运行,其上平层装置搭建桥梁联通停车层、出入口层;横移台车搭载LAT智能搬运器及车辆在停车层或出入口层进行水平横移换列运行;LAT智能搬运器搭载车辆水平纵向运行并进行车辆放置或存取,如图3所示。

图3 升降机示意图

图4 齿形带提升式升降机
升降机设计具有以下要点。
(1)升降机提升方式。停车层数、层间最大垂直距离决定升降机行程及运行速度,低程升降机选择链条提升方式或钢丝绳缠绕提升方式;高程升降机选型齿形带提升方式或钢丝绳曳引提升方式,如图4所示。链条提升方式、钢丝绳缠绕提升方式、齿形带提升方式为强制驱动方式,当采用强制驱动时,应在升降平台端的顶部、底部,对重端的底部设置缓冲器。
(2)升降机结构。升降机设置于井道中,井道位于巷道端部,并与巷道贯通,升降机采用双立柱方式,与横梁、井道建筑结构梁形成框架结构,提升驱动装置设置于立柱框架的顶部,提升介质(钢丝绳、链条、齿形带)安装于提升驱动装置的卷上轮或曳引轮上,一端联接升降平台端,另一端联接对重端。升降机采用单侧多点提升及平衡导轮方式,升降平台采用T形框架结构,T形框架的垂直结构设置提升梁及平衡导向轮组织,通过4组导向轮组悬挂在升降立柱导轨上,上导向轮组受拉力、下导向轮组受压力。T形框架的水平结构承托及导引平层装置,及其上横移台车及智能搬运器等。
(3)全分离式平层装置。平层时,防坠落装置完全放置在井道两侧梁板上,与升降平台完全分离,横移台车搭载智能搬运器及汽车离开或进入升降平台时,所产生的重量变化作用于两侧梁板上,升降平台端的重量变化不会引起提升介质拉伸,实现0 mm平层精度。
(4)提升介质安全倍率校验。考虑各种不利工况作用于提升介质的最大静拉力,升降平台重量G1、平层装置重量G2、横移台车重量G3、搬运器重量G4,适停汽车重量G5,升降平台端最大重量为G=G1+G2+G3+G4+G5;升降平台端提升介质的最大静拉力为F1=(G1+G2+G3+G4)/4+0.6×G5/2;对重端重量G′=G1+K×(G2+G3+G4+G5),K为0.4~0.5;对重端提升介质最大静拉力F2=G′/4;提升介质最小破断拉力应满足FP/F1≥7、FP/F2≥7,如图5所示。
(5)电机选型。设备选用三合一变频调速电机,减速机输出轴转矩应大于升降机运行的最大负载扭矩,变频减速电机速比按照预设的升降机运行速度、加速度、卷上轮直径计算,平衡选择电机输出轴转矩、速度比、电机功率,确定电机制动转矩。最大负载端扭矩为最不利工况下升降平台的最大静张力差、升降平台运行阻力、升降平台不平衡作用力、升降系统加速运行的最大惯性力等作用于卷上轮的扭矩和。
(6)升降机设置。升降平台总高度L1、升降平台下段高度L2、最大升降行程H、升降平台最顶层时至驱动轮中心L3、对重最顶时至驱动轮中心L4、对重高度L5、升降平台最底层时于缓冲器板高度L6、升降平台最顶层时至缓冲器板高度L7、对重至缓冲器底板高度L8、井道机坑深度L9、驱动部底座高L10,L9=L2+L6;L3=L1-L2+D/2+L10;提升介质总长度 L=H+L3+πD/2+L4,如图5所示。

图5 升降机示意图
2.5 横移台车
横移台车采用框架式结构,设置智能搬运器运行轨道、收容车停放空间,设置双轴双轮驱动、四点双轮行走系统,确保横移台车平稳越过导轨间隙,智能搬运器出入时不产生窜动。采用多芯电缆进行动力、通讯、控制传输,电缆收绳、放绳速度与横移台车速度相匹配。采用光通讯时,发射端固定在升降平台,接收端固定在横移台车。采用激光测距时,激光器固定在升降机平台,接收端固定在横移台车,通过激光进行距离测量。采用条形码识别系统时,将读码器设置在横移台车,通过读码器读取固定车位的条形码,进行车位识别。
2.6 智能搬运器
智能搬运器搭载车车辆进行纵向运行、车辆放置及存取。搬运器是存取交换技术的载体,决定着停车位的平面结构型式、空间尺寸、收容车规格及搬运车辆能力。输送带交换式搬运器(以下称为LAT智能搬运器)是一种可实现在光整纯平面上进行车辆存取的停车设备搬运器,停车位表面光滑平整,如图6所示。

图6 停车位表面及停车动作图
LAT智能搬运器的存取交换能力由工作原理及结构确定。采用伺服电机驱动,高扭矩兼快速反应,确保行走系统、输送带系统、机械臂系统的动作协调一致。设置多排、单点双轮全驱动行走系统,保持直线行驶能力。收容汽车最大质量为2 500 kg、最大轴距为3 400 mm,汽车车轮完全自由停放在搬运器输送带表面。承载装置采用隼接并焊接的箱式结构,强度高、抗变形能力强。
LAT智能搬运器由横移车上驶入停车位或出入口停车平台进行取车或存车时,通过设置双滑轮收线装置实现动力、通讯、控制3条电缆的同步收放,与LAT智能搬运器的运行相匹配,进行电缆的自如收缆、放缆。
2.7 电气控制与综合管理
控制系统是通过识别记忆方式实现车辆的入库存放、出库取车。需根据库内搬运系统、智能搬运器、出入口、停车位的布局与配置,搭建电气控制系统总体框架,通过具体分模块控制技术,按照各种条件规划设计出不同位置、不同寻车条件等实现对车库整体的控制。
通过定制开发的管理软件,利用物联网、移动互联网技术建设停车的统一管理平台,如图7所示。把立体车库和驾车者紧密联系在一起,提高立体车库的运行效率与资源利用率,为车库管理提供实时查询、统计、分析功能,为驾车者提供停车导航、车位预定、预报、在线交易等便捷服务。

图7 车库控制及管理系统示意

图8 钢结构主体

图9 混凝土结构主体
2.8 停车位及主体结构
停车位布置在巷道两侧,可单列或重列布置,层层叠放式设置,停车位表面结构为光整平面,停车位净空高度较低。
车库主体结构主要包括设备运行区、车辆停放区、出入口交换区等,还需考虑设置消防配套、通风及排水、设备维修通道及楼梯、电源引入等功能性设置。车库主体通常采用钢结构、混凝土结构或钢混结构,如图8~10所示。停车位楼板结构受力按4.0 kN/m2,考虑终饰面平整度及表面承载能力,升降机井道、机坑、巷道等处的受力大小及空间尺寸应按照项目设备受力图的要求实施。主体框架可采用PKPM建模进行受力验算。
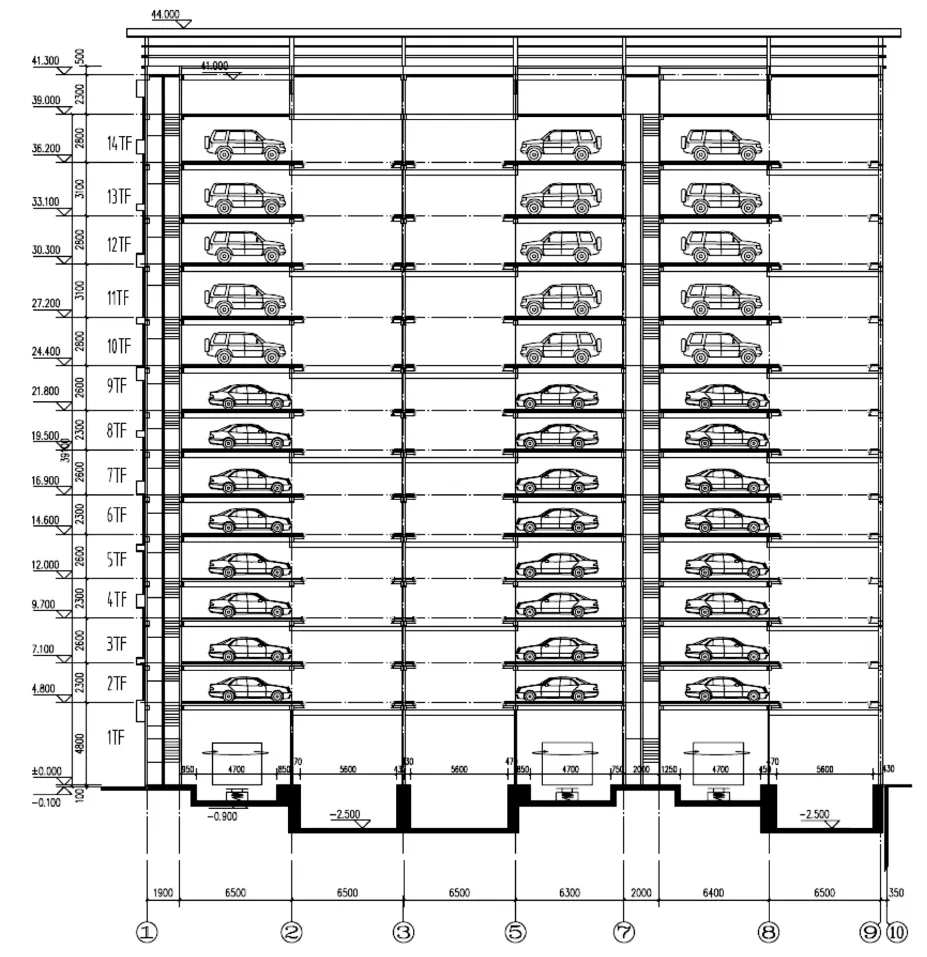
图10 钢混结构主体
3 应用情况
平面移动式停车设备采用齿形带式升降机,具有速度快、行程高等优势,与横移技术、搬运器技术实现了在架空层上设置多层停车库的方案,LAT智能搬运器使得停车位平整且免维护,项目已完工投入使用,实际应用情况如图11~12所示。

图11 项目停车入口

图12 停车设备内部概况
4 结束语
本文通过对平面移动式立体停车技术的设计方法进行梳理,为今后该类型项目提供了设计经验及参考。同时,针对升降机设计、搬运器设计等重点领域的概况总结,得出如下结论。
(1)中置升降机采用齿形带提升方式,提升速度快、行程高、噪声低,提高了平面移动式停车设备的垂直运输效率、垂直运输高度,有利于平面移动式停车库朝着高层、架空式车库设置发展。
(2)采用了T字形升降平台,单侧四点齿形带提升方式,卷上轮直径较小,使得驱动部体积小、成本低,可实现2 m/s的提升速度,运行平稳。
(3)采用输送带交换式汽车搬运器,实现将车辆停放在光整的纯平面上,停车位平整简洁,停车泊位终身免维护。
(4)紧凑的存取小车框架与传动结构设计理念,载重2 500 kg,能快速平稳运行;更薄的存取技术,停车空间距离要求更少,能够有效节约成本。
(5)首层架空设计,在大楼4F层相对标高为+14.000以上,实现了4个停车层、96个独立停放车位、最大升降行程20.5 m的设计,顺利满足首层架空、低层商用、高层车辆停放的项目要求,灵活定制车位存放形式,易于实现快速存取,使得整体方案扩展性强。
猜你喜欢
英语文摘(2020年7期)2020-09-21 03:40:56
数学小灵通(1-2年级)(2019年5期)2019-05-21 10:02:14
中国特种设备安全(2019年4期)2019-05-20 09:56:10
好孩子画报(2019年10期)2019-01-10 02:15:30
自然资源情报(2018年7期)2018-12-28 00:52:52
中国特种设备安全(2018年10期)2018-12-18 02:17:02
遵义(2018年13期)2018-08-08 03:46:00
凿岩机械气动工具(2016年3期)2016-03-01 04:00:21
肿瘤预防与治疗(2015年1期)2015-09-26 07:26:23
水电站机电技术(2014年1期)2014-09-26 11:59:53
