
机载光电平台的结构及原理分析
2020-06-20 03:36:16林宏旭张永顺王戴丰
机械设计与制造 2020年6期
林宏旭,张永顺,王戴丰
(大连理工大学精密与特种加工教育部重点实验室,辽宁 大连 116024)
1 引言
无人机是一种无人驾驶且可以承载特定任务载荷的航空器,具有远程操作能力和一定自主性。由于其具有体积小,重量轻,机动性和隐蔽性强,无人员伤亡等优点,在未来战争中的作用越来越大,利用无人机侦察是打赢信息化战争的重要先决条件,有着其他侦察手段无法比拟的优势。机载光电平台作为无人机的“眼睛”对于完成侦查、定位、跟踪和校射等任务至关重要。平台是整个光电系统的载体和执行机构,其总体布局和结构形式关系到平台的稳定精度、响应速度和承载能力等性能。机载光电平台通常安装于飞行载体的底部或前端,主要功能是承载光电设备,驱动视线在一定范围内移动并保持稳定。由于空中环境的复杂性,平台除了受到驱动力之外,还要承受到载机振动、加速度载荷和空气阻力等作用力。基于上述要求,参考多种框架结构方案和技术指标[1-3],创新地提出了一种新型机载光电平台的结构方案,如图1所示。

图1 机载光电平台的三维图Fig.1 3D Assembly Model of Airborne Photoelectric Platform
2 结构特点
平台按照轴框分类,属于“四轴四框”结构,如图2所示。包括两部分,一部分是自转机构,由自转轴系及框架组成,另一部分是球形机构,由全解耦3自由度的并联机构组成。
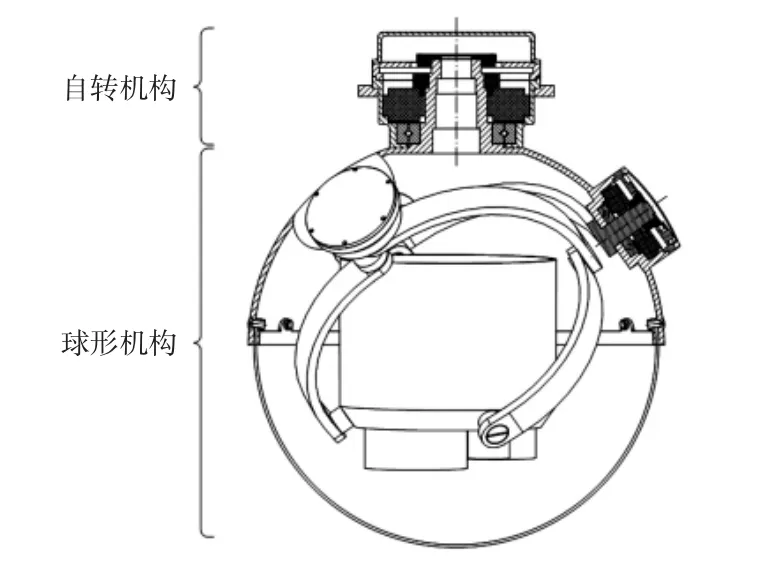
图2 平台装配图Fig.2 Assembly Drawing of Airborne Photoelectric Platform
2.1 整体框架
整体框架为“球柱形”结构,是平台的基体部分,主要由方位框架和球形框架组成,占平台总质量的20%左右,作用是承重和连接其他零部件。为了保证足够的强度和刚度,平台主体框架采用一体化成型结构,并选用性能良好的航空铝合金材料7075-T6。在设计上布局紧凑,有效提高了空间利用率,减小了部件绕转动轴的转动惯量[4]。球形和柱体的外形,能够有效降低飞行环境中的风阻力矩,而薄壁化的结构则可以在保持结构强度的前提下降低重量。
2.2 自转机构轴系
自转机构轴系即为方位轴系,如图3所示。主要用于连接球形框架和光电设备,通过驱动电机使球形框架绕方位轴作回转运动,从而实现视线在方位方向的大范围变化。主要由方位轴、驱动电机、交叉滚子轴承、锁紧螺母、圆光栅编码器和导轨等组成,通过固定架与载机机身的相连,完成自转机构轴系乃至整个光电平台的固定。驱动电机和圆光栅编码器安装在同一轴系上,圆光栅编码器由圆光栅、读数头和安装法兰组成,圆光栅和安装法兰通过螺母与方位轴顶端固定,读数头安装在支架上,识别信号并输出角位移数据。自转机构轴系为中空形式,采用这样的形式:(1)可以有效减小排线的线扰力矩,并为球形机构轴系线路提供枢纽中心;(2)极大降低了结构重量,在实现轻量化的同时保持了轴的刚度。部件的装配为立置式结构,上部由分离式的外壳密封,外壳由方位框架和顶盖构成,具有简单紧凑,便于制造、装配与维护等特点。

图3 自转轴系爆炸图Fig.3 Exploded View of Rotational Axis Structure
2.3 球形机构轴系
球形机构轴系即指并联机构主动副轴系,如图4所示。主要是用来连接并联机构杆件、设备架、及陀螺仪和圆光栅编码器等组件,同时带动光学负载等作回转运动。主要由并联机构转动轴、驱动电机、交叉滚子轴承、锁紧螺母、支架和限位机构等组成。驱动电机和圆光栅编码器安装在同一轴系上,圆光栅编码器的组成和安装方式与自转机构轴系相同。自转机构轴系设计为可以360°连续转动,而球形机构轴系有限位角度,相应的限位装置为静动限位块,动限位块通过螺钉与并联机构转动轴固联,静限位块则安装在支架上,两者配合可以避免误操作、电机或控制电路失效等情况造成并联机构杆件和设备架的过限位故障,进而防止发生碰撞及损伤设备。自转机构轴系采用斜置式结构,轴系外壳同样采用分离式设计,对应的结构简单,利于减小风阻力矩,密封效果好,便于安装和拆卸,为后期维护保养提供了有利条件。
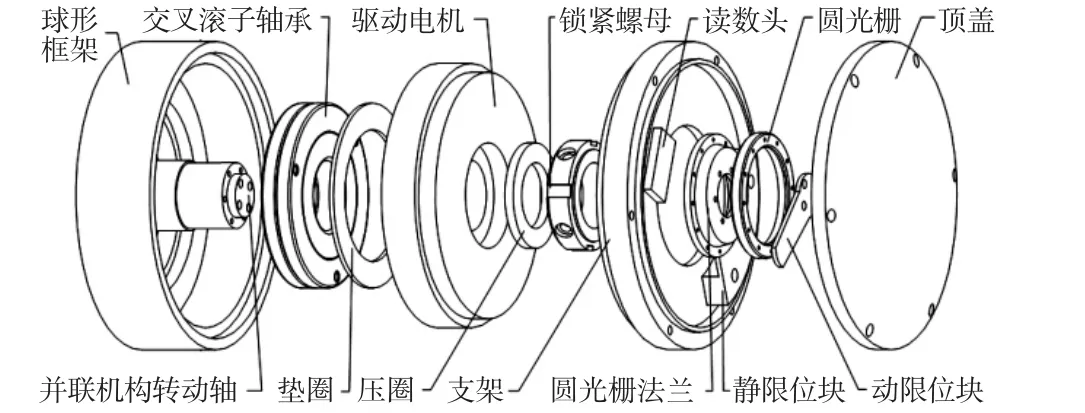
图4 球形机构轴系爆炸图Fig.4 Exploded View of Axis Structure on Spherical Mechanism
3 工作原理
机载光电平台的运动一般可以概括为4种方式:惯性态、搜索态、锁定态和跟踪态。惯性态是指由驱动电机和自锁装置保持设备架在载机坐标系下的稳定,搜索态是指依靠自转机构的运动实现光电设备的视线绕方位轴转动,进而对载机下方进行全方位的侦查,锁定态和跟踪态用来实现成对动静目标的定位、校准和跟踪侦查,主要由球形机构完成。惯性态和搜索态的功能实现简单,运动形式单一,而锁定态和跟踪态是平台的核心功能,运动过程复杂,所以需要对球形机构进行原理分析,进而掌握平台的特点。
3.1 运动链分析

图5 球形机构原理图Fig.5 Structural Sketch of Spherical Mechanism
末端执行器通过3条运动链连接到壳体基座上,每条运动链有3个转动自由度,具体是由3个交叉和垂直的转动副实现,其结构形式为R⊥R⊥R,如图5所示。进一步得出,球形机构末端执行器的自由度是3条运动链自由度交叉的结果。每条运动链都有基准坐标系X,Y,Z方向上的转动副,当某一条运动链的主动副驱动末端执行器绕该转动副轴线做旋转运动时,其他运动链中具有同轴向的转动副则进行随动,主动副皆不参与随动运动[5-6]。
为了验证球形机构具有3个转动自由度,可以利用螺旋理论和反螺旋理论,这样能分析出球形机构每条运动链的末端约束力。由于3条运动链的结构完全一致,所以对末端执行器的约束力类型也相同,定义第i条运动链中的第j个转动副为Rij,其中,Ri1为每条运动链的主动副,设旋转角度为θi,以第1条运动链为例,链路中转动副的运动螺旋可以表示为:

运动链的约束由3个非线性力产生并交集在末端执行器上,根据旋量对偶原理[7],运动副螺旋和约束力螺旋互易积为0,可以得出3个与运动副螺旋互逆的反螺旋:

式(2)说明了每条运动链对动平台施加了3个约束力矢,分别沿着基准坐标系的X、Y、Z方向,限制了末端器执行器的3个平移自由度,因此从理论上证明了球形机构只具有绕X、Y、Z方向上的转动自由度。
3.2 运动学分析
如图5所示,3个控制电机固定在壳体基座上,沿着主动副Ri1轴线的单位向量表示为ui(i=1,2,3),其方向和位置是固定的。末端执行器上的转动副Ri3中心轴线的单位向量表示为νi,由于末端执行器相对于壳体基座的位置关系是依据齐次变换矩阵Q,则νi可以通过Q表示。每一条运动链对应中间的转动副Ri2轴线的单位向量标记为wi,可利用主动副输入角θi和wi与ui的夹角呈表示,wi与νi彼此垂直,且不受运动和位置变化的影响。采用欧拉角对球形框架末端器的姿态进行描述,如图6所示。
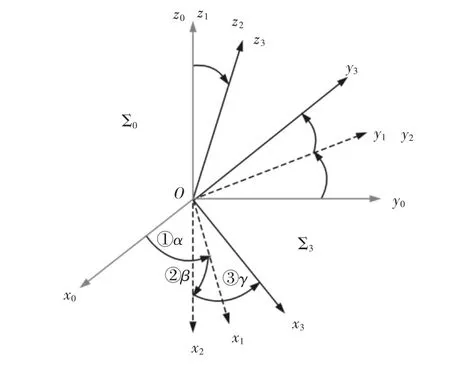
图6 末端姿态描述Fig.6 Terminal Attitude Description
图中:α—侧摆角;β—俯仰角;γ—偏转角。
为了得到球形机构各转动副的齐次变换矩阵,以一条运动链为例,定义机构运动坐标系:坐标系Σ0为建立在球形框架球心的基准坐标系,坐标系 Σ1、Σ2、Σ3分别代表转动副 Ri1、Ri2、Ri3的位置,四个坐标系原点重合且通过球心,坐标系Σ3与末端执行器固结,代表输出位姿。下面描述单个运动链相邻转动副坐标系之间的齐次变换矩阵:

式(3)~式(5)分别代表坐标系 Σ0到 Σ1、Σ1到 Σ2、Σ2到 Σ3的齐次坐标变换矩阵,在此基础上,可以建立坐标系Σ0到Σ3的齐次变换矩阵Q为:

第1条运动链中3个转动副相对于基准坐标系Σ0的单位向量可以写成:

利用式(5)和式(6)可以求出与末端器相连的转动副轴线向量 νi:

当主动副转动角度θ1时,中间转动副轴线的单位向量可以表示为:

从运动链的几何结构中确定了wi与νi相互垂直,且它们的模量始终为1,可以得出关于wi和νi的等式:

将式(8)和式(9)代入式(10)中得到方程:

因此可以得到α=θ1,类似地对第2条和第3条运动链进行计算,最终得出关于球形机构输入量和输出量的运动学方程:

由式(12)可以看出,球形机构末端姿态不受3个主动副的运动次序的影响;3个主动副的转动不干扰彼此,单个输出自由度只依靠对应单个的输入决定;运动学方程的解析解都是形式简单,易于求解的;每个运动链中的转动副转角只与描述末端姿态的欧拉角有关。综合分析,得出球形机构是完全解耦的结论。
进一步可求得球形机构的雅克比矩阵是一个单位阵:

因此验证了机构是不存在驱动奇异点和约束奇异点的,并且机构在空间任意位置向各个方向进行运动和施加力所需的力矩相等,即球形机构是具有完全各向同性的[8]。
3.3 工作空间
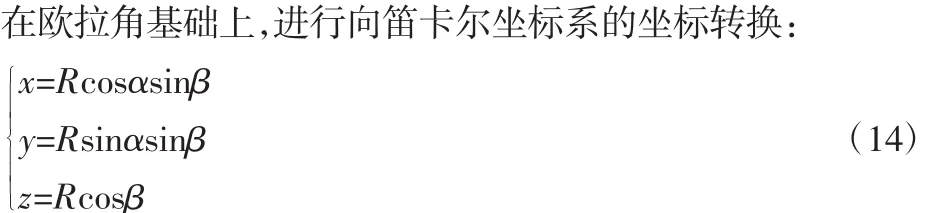
式中:R—视线参考点到球心的距离,这里设为单位值1,球形机构主动副角度运动范围为(-75~200)°之间,利用由Matlab中 rand()函数,产生[0,1]之间的随机数,创建主动副输入角度的随机值[9]:

多次循环后得到N组数据,利用式15将输入角的随机值转变到视线的工作范围,生成工作空间云图,如图7所示。可以看出,球形机构工作空间基本覆盖整个球体空间,只在机构基座的局部区域有不可达到位置,所以完全满足机载光电平台的技术要求和实际需要,对比耦合机构优势明显。
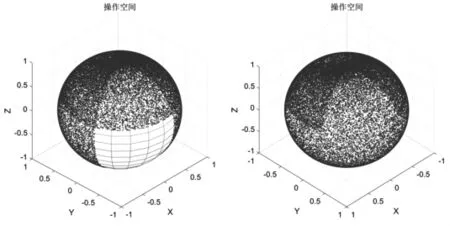
图7 球形机构工作空间Fig.7 Workspace of Spherical Mechanism
4 有限元分析
无人机完成一次飞行任务要经历起飞、爬升、巡航、下降、着陆回收等阶段,在这个过程中,安装在机身上的机载光电平台会受到空气阻力、载机振动等外界激励影响。在各个飞行阶段,外部激励对机载光电平台作用效果不同,同时,要完成视轴变化等功能,平台的相关组件必须进行运动,所以机载光电平台的受力情况极其复杂。综上情况,需要利用有限元方法,结合ANSYS软件对球形框架进行静力学分析,判断刚度和强度是否满足工作需求[10]。根据对恶劣工况的分析,在球形框架上施加负载载荷、风阻载荷、惯性载荷、转速载荷和结构约束后,经计算得到球形框架结构在静力载荷作用下的位移变形图、应力分布图以及应变分布图,如图8所示。根据结果图可以看出球形框架最大应力区出现在方位轴和球状壳体的连接处,沿飞行方向有着明显的应力集中,根据位置关系可以得出影响应力分布的原因主要是风阻载荷和航向加速度载荷。应力最大值为1.132MPa,远小于7075-T6铝合金抗拉强度505MPa和屈服强度280MPa,强度完全符合要求。应变分布图与应力分布图情况相似,应变最大值为1.8046×10-5。根据应力应变曲线变化规律,结合已求得的应力应变值大小,可以判断应力应变数值成正比关系,结构处于弹性变形阶段范围,不会产生塑性变形,即当载荷去除时,变形消失。位移变形图及其截面图显示出,方位轴及连接处基本没有任何变形,在XY平面上,以方位轴轴线投影点为中心,随着球状壳体半径越大,则变形量越大,沿着飞行方向上的球形壳体半径最大处是变形量最大的区域,且迎风侧出现极大值,大小为1.1636×10-5m。综合分析可知:位移变形分布主要受到自转加速度载荷和航向加速度载荷的影响,而整体变形量趋势均匀过渡,没有缺陷性的结构设计造成变形量出现急速变化的情况,并且最大值小于0.025mm,满足球形框架设计的技术要求,刚度较为理想。综合上述分析可以得出结论,即球形框架结构的静态特性满足技术指标对强度和刚度要求。

图8 静力分析结果云图Fig.8 Results Nephogram of Static Analysis
5 结论
完成了一种新型机载光电平台的整体布局和结构设计,具有质量轻,视线范围大,结构紧凑和易于操控等一系列优点。详细说明了主要部件的具体细节和特点,分析了球形机构,从原理证明了球形机构是一种3自由度全解耦并联机构,且具有无奇异点、工作空间大、完全各向同性和刚度均匀等特点。考虑到恶劣工况对平台的影响,对球形机构进行了有限元分析,从静力分析结果中证明了其刚度和强度符合要求。
猜你喜欢
防爆电机(2022年3期)2022-06-17 01:41:24
幼儿园(2021年12期)2021-11-06 05:10:20
船舶标准化工程师(2019年4期)2019-07-24 07:21:06
测控技术(2018年12期)2018-11-25 09:37:50
制造技术与机床(2017年9期)2017-11-27 02:13:45
自动化学报(2016年8期)2016-04-16 03:38:51
自动化学报(2016年5期)2016-04-16 03:38:49
中国修辞(2016年0期)2016-03-20 05:54:32
幼儿100(2016年28期)2016-02-28 21:26:17
舰船科学技术(2016年1期)2016-02-27 15:39:19
