位置协助的无人机毫米波通信网络自适应信道估计
2020-06-19 08:49:06何尔利纪澎善贾向东牛春雨
计算机工程 2020年6期
何尔利,纪澎善,贾向东,2,牛春雨
(1.西北师范大学 计算机科学与工程学院,兰州 730070; 2.南京邮电大学 江苏省无线通信重点实验室,南京 210003)
0 概述
毫米波(millimeter-Wave,mmWave)通信具有丰富的频谱资源,是5G通信中的关键技术之一,而无人机(Unmanned Aerial Vehicle,UAV)协助的无线通信可以达到更高的系统容量、更长的通信距离以及更大的覆盖范围,是5G技术的另一个重要应用领域[1-2]。无人机具有高机动性、灵活性和易于部署的特点,已被广泛应用于各种场景,如作为空中基站为地面用户提供服务、在紧急情况下提供网络覆盖等[3-4]。结合无人机的毫米波通信网络可以实现高数据传输速率,可提供更加灵活的网络覆盖。然而,毫米波通信中存在严重的路径损耗,为了弥补这一不足,需要通过天线阵列形成窄带定向波束和较高天线阵列增益来补偿损耗[5]。
当无人机被作为空中用户设备时,上行链路传输需要更高的宽带才能上传采集到的数据信息[6]。为了更好地支持无人机上行链路通信并获得更高的功率增益,需要通过天线阵列和窄带波束相互导向[7],自适应地调整天线辐射模式,形成针对无人机的特定天线波束,以增强信号接收能力。因此,研究人员提出在BS和UAV两端的角域中搜索波束最佳方向的问题。
为解决波束追踪及对准问题,研究人员针对自适应波束成形及信道估计方案做了大量研究。文献[8-9]提出多阶段自适应毫米波信道估计方法,在发射端和接收端实现了高天线增益。文献[10]提出一种以用户为中心的分布式毫米波蜂窝小区基站与波束的自适应选择算法,以保证用户服务质量,但该算法只适用于静态节点。文献[11]研究了车联网环境下先验信息协助的信道估计方法,但其只限于二维场景中,没有考虑到无人机作为空中用户在三维场景中的位置运动模型。文献[12]提出一种基于波束模式的毫米波通信系统波束追踪算法,利用波束辐射模式的变化估计到达角,实现了波束的精准对准。文献[13]为满足无人机实时波束匹配需求,研究了基于傅里叶变换的码本设计方法,有效提高了波束搜索效率。
上述研究方法均假定初始信道信息已知,但由于无人机网络的机动性较高,其运动场景为三维模型且位置信息等参数未知。因此,需要进一步研究无人机系统专用信道估计方法。文献[14]对无人机毫米波网络的研究现状和面临的挑战进行分析,以实现无人机快速波束追踪为目标,提出使用侧面信息辅助波束追踪过程的设想。文献[15]基于波束空间多输入多输出系统,提出一种利用无人机移动特性的波束选择方法以最大化速率和能量效率,并构建了无人机基站和地面用户位置模型。
在文献[14-15]的基础上,本文构建一个单无人机用户毫米波通信网络模型,提出基于位置信息协助的无人机毫米波通信网络BS-UAV信道估计方法。通过UAV与基站三维位置模型获取先备BS和UAV位置信息,以辅助信道估计过程,提高天线增益并缩短信道估计时间。
1 系统模型

(1)
基站ULA的发射角(Angle of Departure,AOD)为φ∈[0,π),其阵列响应如下:
(2)
基站和无人机之间的信道为窄带毫米波LOS信道,H为MBS×MUAV的矩阵,则单径信道几何模型如下:
(3)

基站使用波束成形向量fp,p=1,2,…,MBS;UAV使用测量向量wq,q=1,2,…,MUAV。由文献[18]可知,若采用块衰落信道模型,则UAV处的接收信号y可表示为:
(4)

UAV处的接收信号的矩阵表示为:
(5)

2 位置信息协助信道估计
2.1 无人机位置模型


图1 无人机位置模型示意图
假设u和v分别为LOS路径的仰角和方位角。由三角形几何理论[19]可得:
(6)
其中,ΔH为UAV和BS的高度差,由式(6)及几何理论可进一步得到如下公式:
cosθ=sinvcosu
(7)
假设无人机的位置信息为距离地面基站dD的圆形区域D,其半径为rD,则区域D中的一点可以表示为(xD,yD,HUAV)。由式(6)和式(7)可得:
(8)
UAV的先备AOA和AOD区域即为UAV的先备位置信息,利用先备信息可排除部分不正确的AOA和AOD信息。在此基础上,mmWave基站可以将波束调整到所需方向,为信道估计过程提供辅助。由以上公式推导过程以及图1位置模型可得UAV先验的AOA和AOD区域,则位置区域D先备的AOA和AOD信息可表示为:
(9)
(10)
其中,θ∈Rθi,φ∈Rφi。
2.2 自适应信道估计及码本设计
无人机毫米波通信网络的特点在于无人机在空中的反射通常比地面上移动用户周围的反射要少得多。不同的多径分量在无人机一侧有非常接近的转向角,整个信道在角度域中较为稀疏[20]。因此,基于压缩感知的自适应信道估计方法对于无人机mmWave系统较为适用。在无人机毫米波通信系统模型中,通常采用发射端的K个波束成形向量和接收端的K个测量向量组成的组合权重向量来估计信道[8],并将自适应信道估计过程划分为k个阶段,在第k个阶段可供选择的导向向量数为Kk,如图2所示。
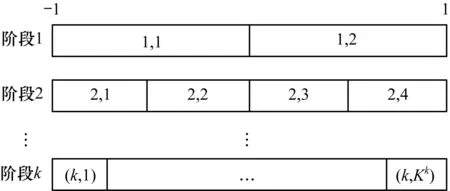
图2 多阶段自适应信道估计示意图
码本的设计是为了在数据传输前加速波束搜索过程,基于设计好的码本可以为波束成形过程找到最佳的导向向量。相较于穷举搜索的方式,分层搜索波束最佳方向的复杂度低、性能更佳,因此被广泛采用。本文基于文献[21]所提出的分层多分辨率码本设计方案设计波束成形向量,并采用空间频率相同的方案,具体如下:
(11)
其中,n=1,2,…,Kk,arccosRk∈[0,π],空间频率范围为(-1,1)。在波束宽度越窄的方向,获得的波束成形增益越高。
2.3 位置信息辅助信道估计方法
准确的波束方向估计对于波束形成算法获得最佳的天线增益具有重要作用。由于非理想信道条件会导致波束方向估计不准确,传统的波束形成算法存在严重的性能退化问题,而侧面信息可以从另一角度提升信道估计过程性能,因此本文提出一种融合信道信息与无人机位置信息的方法来精确估计其角度范围。使用来自全球导航卫星系统(Global Navigation Satellite System,GNSS)的无人机先备位置信息提升自适应毫米波信道估计性能,无人机的位置信息直接通过GNSS或由宏基站提供给mmWave基站,以实现快速波束扫描过程。
利用无人机位置信息可以预先推导出视距路径的AOA和AOD,其范围定义如下:
(12)
(13)
其中,为φ∈Rφii,θ∈Rθii。结合式(9)和式(10),即可得到在毫米波基站先备的AOA和AOD辅助信道估计信息。
令p(k)和q(k)分别为波束成形向量和测量向量的索引。在k阶段,由两者组成的向量对为(p(k),q(k))。在信道估计过程中,如果接收信噪比(Signal-to-Noise Ratio,SNR)最大,则该导向向量对被选取并估计到正确的AOA和AOD范围的概率可表示为:
P(p(k),q(k))=
(14)

(15)
(16)
令f(x)为式(14)的概率密度函数,其计算过程如下:
(17)
由贝叶斯理论可知:
P(p(k),q(k))=
(18)

(19)

(20)
在信道估计完成后,期望接收信噪比为:
(21)
另一个量化性能指标为信道估计时间,当无位置信息辅助时,平均信道估计时间计算公式如下:
T=k(K2-1)
(22)
在位置信息辅助方法下,平均信道估计时间为:
T(θ,φ)=
(23)
3 仿真分析
为研究位置信息对信道估计性能的影响,对本文位置信息辅助的无人机毫米波网络信道估计方法进行仿真。如图1所示,假设基站位置确定,无人机位置不确定,位置信息区域D半径rD的大小分别代表不同精度的位置信息,分别在无位置信息、有位置信息(粗定位、精定位)的情况下对接收信噪比和平均信道估计时间进行比较。同时,选取不同发射角度进行仿真分析,其他仿真参数设置如表1所示。
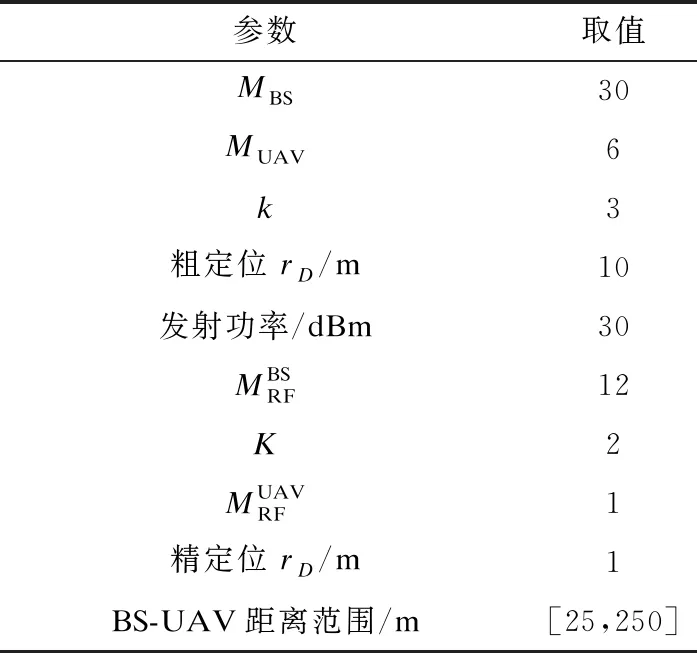
表1 仿真参数设置
图3给出在不同AOD大小的情况下,无位置信息辅助方法与本文所提出的位置信息辅助信道估计方法接收信噪比的对比。从图3可以看出,随着无人机与基站之间距离增大,接收信噪比总体呈下降趋势,且AOD=25°时的接收信噪比整体高于AOD=75°的接收信噪比。当无人机与基站之间距离为25 m~75 m时,有无位置信息对接收信噪比的影响不大。这是因为当无人机与基站之间距离较近时,接收功率足够大,位置信息对天线阵列增益影响较小,但两者间距大于75 m时,有位置信息辅助的接收信噪比明显高于无位置信息的方法,且AOD的大小变化不会对上述结论造成影响,即从天线增益的角度来看,有位置信息方法可获得更高的天线增益。同时,如图3中放大区域所示,在有位置信息辅助的情况下,精定位位置信息比粗定位位置信息辅助策略性能好,且位置信息精确程度越高,接收信噪比越大,位置信息辅助方法的性能越好。

图3 不同位置信息下接收信噪比对比
图4给出不同AOD大小情况下,位置信息辅助方法与本文方法的平均信道估计时间对比。从图4可以看出,在无位置信息情况下,信道估计所用时间最多且不随距离变化。在位置信息辅助下,平均信道估计时间大幅减少,随着无人机与基站距离的增加,位置信息辅助策略下平均信道估计时间缩短。这是因为位置信息使得要进行波束扫描的角域范围变窄,从而找到最佳发射波束所需的时间缩短。

图4 不同位置信息下平均信道估计时间对比
此外,位置信息辅助信道估计方法还可适应AOD的变化,对于不同大小的AOD,本文方法所用平均信道估计时间更少。位置信息精度提升可进一步优化平均信道估计时间,在精定位位置信息辅助情况下,毫米波基站可以在极短的时间内将波束调整到所需方向。
4 结束语
本文提出一种位置信息辅助的基站与无人机毫米波信道估计方法。构建三维无人机位置模型,在此基础上,利用位置信息将波束调整到所需方向以辅助信道估计。仿真结果表明,该方法可实现较高的天线增益并缩短信道估计时间。下一步将通过建立无人机航行轨迹三维动态模型设计无人机毫米波网络的三维波束成形方法。
猜你喜欢
北京航空航天大学学报(2021年6期)2021-07-20 07:23:56
电子制作(2019年19期)2019-11-23 08:41:36
北京航空航天大学学报(2019年9期)2019-10-26 02:30:12
通信技术(2019年3期)2019-05-31 03:19:08
电子制作(2018年19期)2018-11-14 02:37:02
电子测试(2018年11期)2018-06-26 05:56:02
电子测试(2018年6期)2018-05-09 07:31:54
雷达学报(2017年3期)2018-01-19 02:01:27
声学与电子工程(2017年1期)2017-06-22 11:30:09
西南石油大学学报(自然科学版)(2015年5期)2015-04-16 05:12:24