
基于小波变换的舰船磁场信号粗提取∗
2020-06-19 06:15:04
舰船电子工程 2020年4期
(海军工程大学兵器工程学院 武汉 430033)
1 引言
磁场信号是水中作战探测的一项特殊信号源。它不受水体条件的限制,灵敏度、分辨率高,且能与各类电子设备兼容,为方向识别、舰船导航等方面提供了源信号,在兵器引信中得到了广泛的应用[1~5]。
磁场引信是水雷的重要引信方式,但在实际的舰船磁场探测中,由于目标磁场强度与地磁场强度存在数量级的差别,且地磁场存在正常的地磁波动,导致目标信号以较低的信噪比淹没在地磁场中,难以进行有效的舰船磁场检测分析[6]。
小波变换具有良好的时频分析能力,可以在非平稳噪声下提取弱信号[7]。本文通过一种基于小波变换的提取方法,将舰船磁场信号从地磁噪声中提取出来,以便于后续的舰船磁场识别与目标定位。
2 舰船磁场与小波滤波
2.1 舰船磁场分析
现代的舰船绝大多数都是由钢铁制成的,它们会被地磁场磁化形成舰船磁场。已有学者证明,在舰船与传感器距离大于2倍船宽的时候,可以用均匀磁化的磁偶极子模拟舰船得到其通过特性曲线,其拟合精度高达85%以上[8~9]。
根据经典的电磁场理论可得到舰船磁场的通过特性曲线。假设目标舰船的磁矩为,其磁场可由下式得到:

上式可得到磁场时域的通过特性曲线。在频域方面,已知大量的分析结果如下[10]:舰船磁场属于极低频信号,其范围集中在0~1.00Hz。大型舰船在经济航速下,其频率上限一般在0.1Hz,而高速航行的小型舰船的频率也不会超过1Hz[11]。
2.2 小波滤波
信号和噪声往往在不同的尺度上具有不同的特征,而小波变换具有较好的时频局部化特性,故它在处理多尺度多分辨率问题上得到了广泛的应用[7,10]。
信号x(t)的连续小波变换定义如下:

其中a为尺度因子,τ为平移因子。离散小波变换则是将a按幂级数展开,τ在尺度内均匀展开,即
本文所采集的是离散的磁场数据,这里将采用离散小波变换。离散小波变化通常用Mallat算法[7]来实现。其递推公式如下:
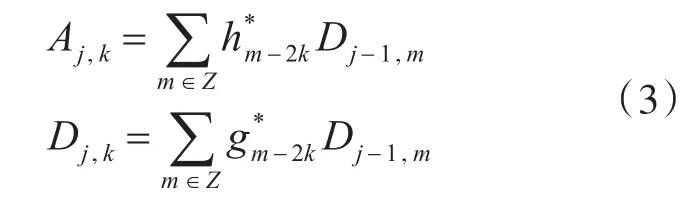
式(3)表明了第j层的近似系数Aj,k和细节系数Dj,k可由第j-1层的细节系数Dj-1,k经过冲击响应为h的低通滤波器和冲击响应为g的高通滤波器求得。分解方式见图1。
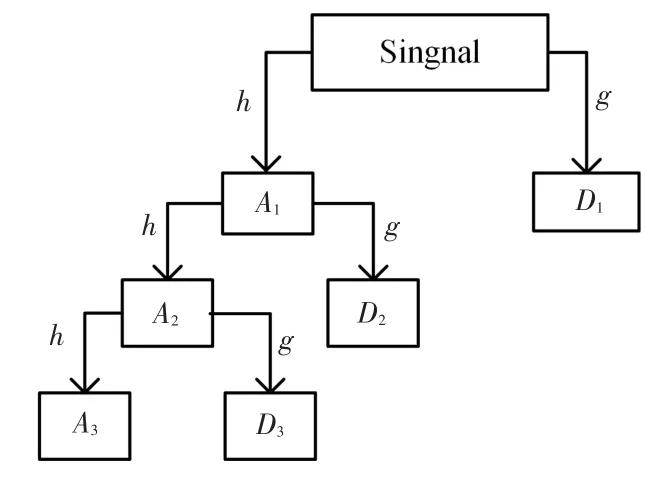
图1 离散小波变换示意图
分解后的近似信号与细节信号通过自定的非线性算子(即对各系数进行适当的操作)后,可通过与分解相反的方式进行信号的重构。
3 舰船磁场信号提取
舰船磁场信号因其数量级小,往往会淹没在磁噪声中,无论是时域还是频域都会与随机噪声存在部分混淆叠加。小波滤波则可在不同的尺度上对噪声进行不同程度的滤除。
3.1 信号模型
假设含噪声的磁场数据为

其中Bi为实际观测到的磁场数据,si为舰船的真实信号,ni为地磁等各类噪声。
对实际观测到的磁场数据进行小波变换得到小波域的观测信号,再通过非线性滤波算子对其进行滤波,最后将滤波后的小波域信号进行小波逆变换。非线性滤波算子是整个小波滤波的关键,本文采用小波域阈值滤波的方法进行去噪。
3.2 小波域阈值滤波
由于舰船磁场信号属于极低频信号,表现相对比较平稳,而噪声常为高频非平稳信号,噪声部分大都集中于高频小波系数中,且信号的小波幅值大、数目少,噪声的幅值小、数目多。故本文采取阈值滤波的方法来对舰船信号进行提取,该方法是由Donoho等提出的[12~16]。其基本思想如下:某信号在小波域内的主要能量都集中于个别几个的小波中,而非平稳的随机噪声几乎覆盖于整个小波域内,所以可选取一个合理的阈值,凡是大于该阈值的小波系数都被认为是信号导致的小波,通过某种方式保留下来,而小于该阈值的小波系数则被认为是噪声导致的小波,予以舍弃[10]。
具体过程如下:
1)对实测的含噪信号进行预处理后确定分解层数N进行小波分解。
2)对小波分解后的细节系数进行阈值量化。常用的量化处理有软阈值处理和硬阈值处理两种。
3)信号的小波重构。根据小波分解的第N层近似系数和各层的细节系数进行一维信号的小波重构。
由以上过程可以看中,最重要的是如何进行阈值量化处理,它直接影响了最后的滤波效果。
常用的阈值函数有两种:硬阈值和软阈值。硬阈值是当小波系数的绝对值大于等于给定的阈值的时候保持不变,当其小于阈值的时候,直接将其置0,即:
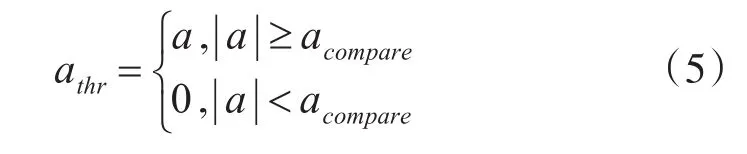
软阈值是当小波系数的绝对值大于等于给定的阈值的时候令其减去阈值后的值为新系数的大小,符号与原系数符号一致,当其小于阈值的时候,直接将其置0,即:

其中,acompare为阈值,a为小波系数,athr为阈值处理后的小波系数。
阈值的选取也有几种常用的方式,分别是:1)固定阈值;2)stein无偏似然估计阈值;3)启发式阈值;4)极大极小阈值;5)多假设检验法;6)Bayes⁃Shrink阈值等。具体的阈值确定方式这里不再赘述。
4 仿真计算分析
4.1 舰船磁场信号获取
假设磁传感器布置在水下z=z0处,船模在y=y0平面中,从x=-x0处向x轴正方向运动到x=x0处,速度为v,如图2所示。
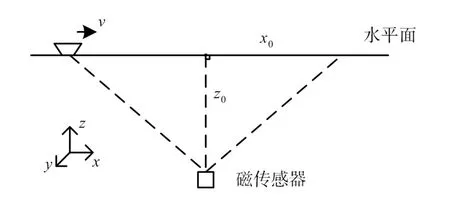
图2 探测系统示意图
通过Matlab进行计算仿真,具体参数设置如表1,其通过特性曲线如图3,将磁场的三分量分别做fft,其频谱图如图4。
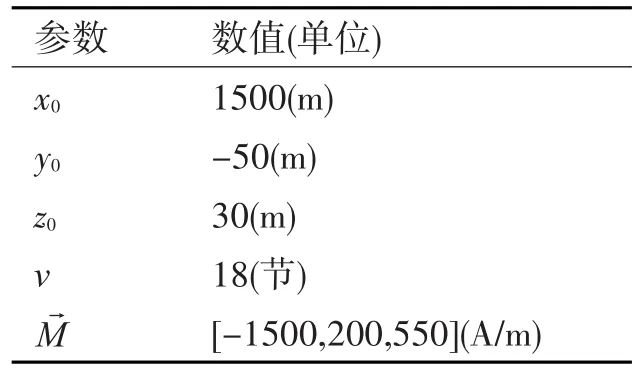
表1 仿真参数设置
4.2 仿真数据滤波
真实舰船磁场的大小,特别是舰船剩磁,在很大程度上取决于地磁场垂直分量的大小,这是因为舰船垂直磁化比较稳定,当舰船不跨越赤道航行时,地磁垂直分量总是从一个方向对舰船进行磁化的。纵向磁化和横向磁化的结果,受舰船航向的影响,随机性很强。故下面选取磁场的Bz分量对原始信号进行小波滤波处理。

图3 船模通过特性曲线

图4 船模信号频谱
首先将磁场信号中加入不同程度的噪声,其时域和频域曲线如下。

图5 三种噪声下的舰船磁场Bz分量

图6 三种噪声下的舰船磁场Bz分量频谱
对含噪信号进行小波滤波,滤波的方式和参数值如表2。

表2 滤波方式
通过以上方式进行小波分解后,得到各层的近似系数和细节系数如图7。
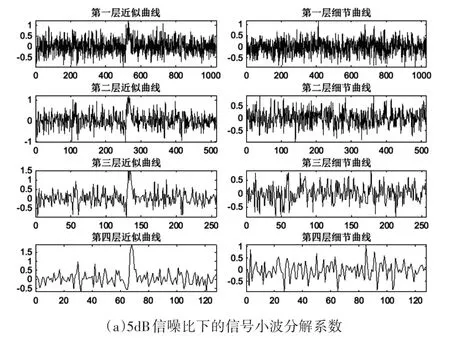
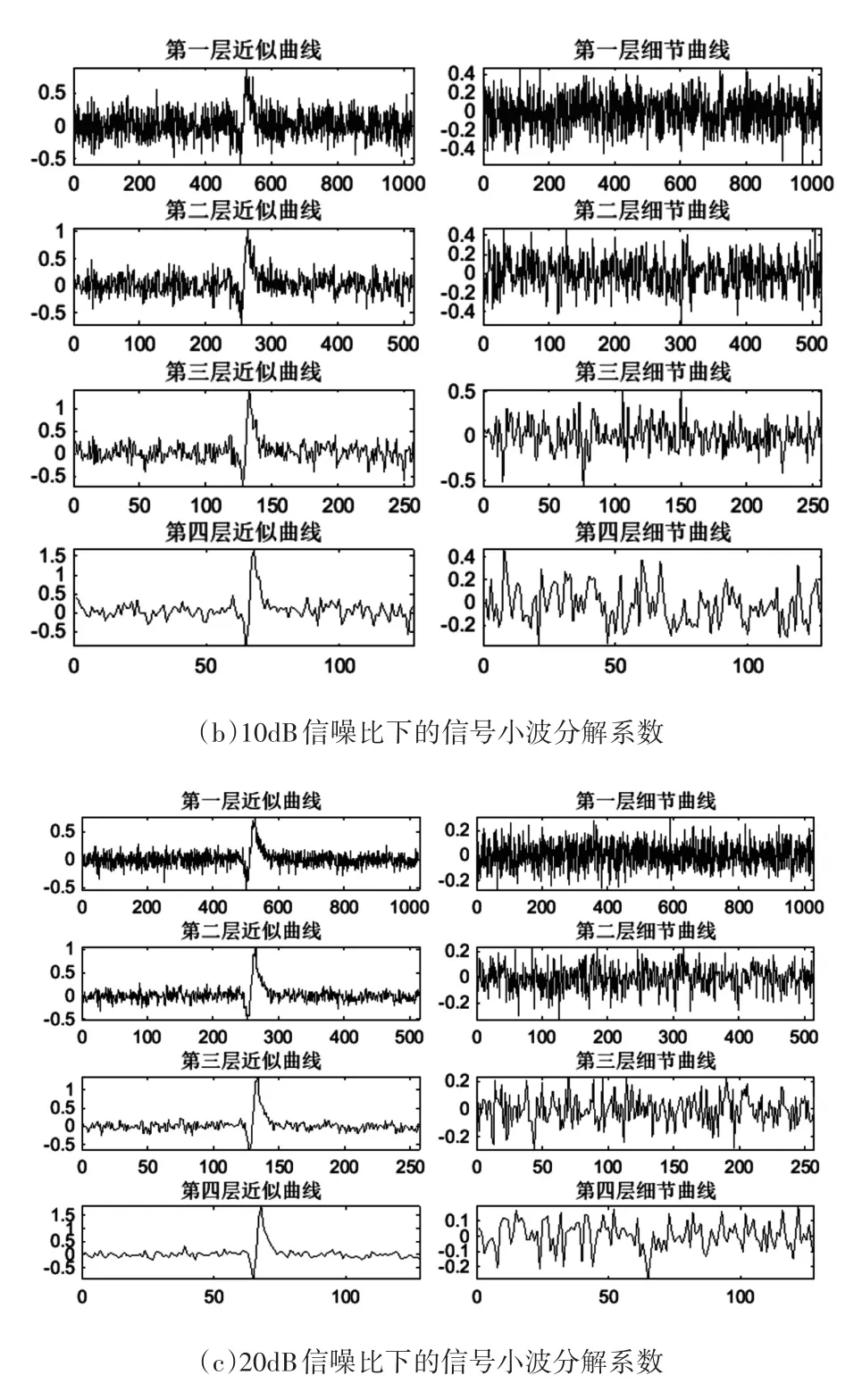
图7 小波分解各层的近似系数和细节系数
根据表2中的滤波方式滤波后,便可得到提取出的目标舰船磁场信号及其频谱。


图8 滤波后的舰船磁场信号

图9 滤波后的舰船磁场信号频谱
4.3 效果评判
滤波后,采用信号的信噪比SNR和信号的均方误差MSE来判断去噪效果。
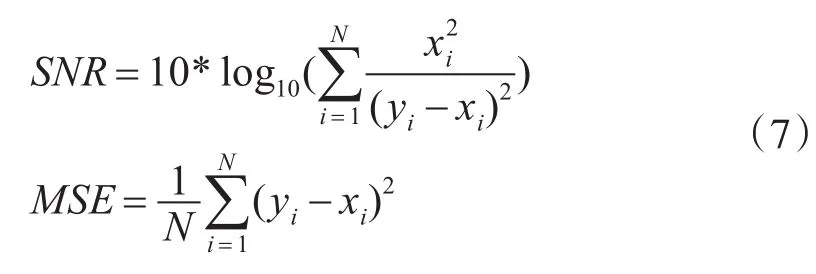
其中,xi表示原始标准信号,yi表示经过处理的目标提取信号。仿真评判结果如表3。
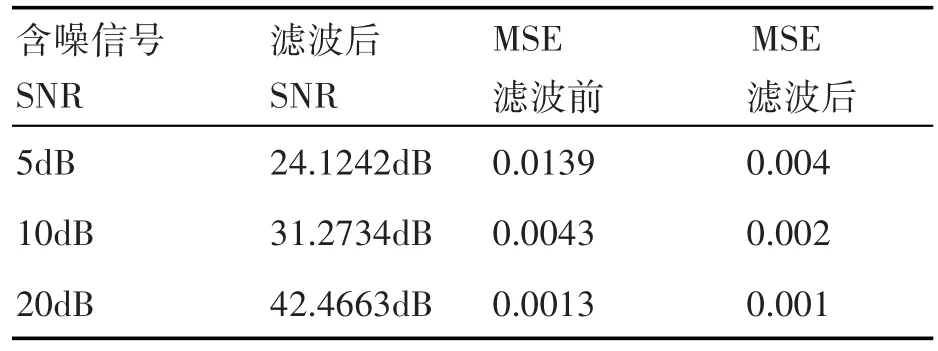
表3 仿真目标提取效果
5 试验计算分析
5.1 模拟舰船磁场信号的获取
通过铁材料制成的模拟舰船在水池中进行磁场获取。模拟舰船的运动方向与磁探仪的x轴一致,并保持z=0m,y取两个值,分别为y=1m和y=2m。将船模按照固定航速平稳走过。方案见图10,探测得到磁场数据见图11。

图10 船模实验图

图11 试验磁场数据
5.2 试验数据滤波
通过第3章节的小波变换的方式对试验所得的磁场数据进行小波滤波,以实现对模拟舰船信号的初步提取。结果如图12。
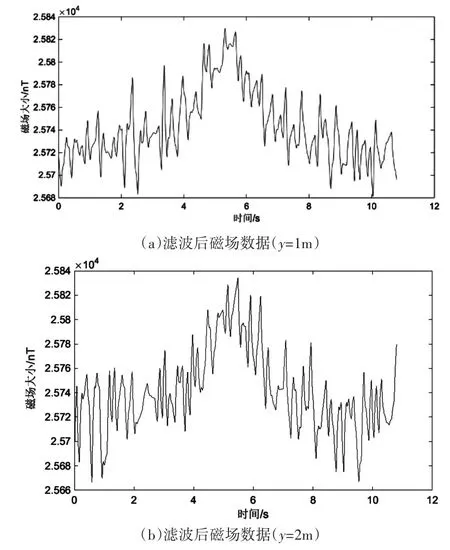
图12 模拟舰船信号初步提取结果
5.3 结果分析
通过试验结果可以看出,模拟舰船信号从噪声中粗糙的分离了出来。但是由于模拟舰船较小,由它产生的磁异常较小,基本都淹没在了正常的磁场噪声中,只能进行粗糙的提取。周边环境的磁场噪声大约为80nT,在正横距离为1m时,产生的磁异常大约为100nT。在正横距离为2m时,船模造成的磁异常就更小了。
6 结语
通过仿真和模拟舰船试验验证了小波变换可以有效地对舰船信号进行初步提取。但是在信噪比较低的情况下,时域信号不能得到很好目标提取效果,需要进一步在频域上进行目标信号的提取,为下一步目标识别与定位提供质量较高的磁场信号。需要注意的是:在小波变换中,各个参数的选取决定着最终信号提取的质量,需根据不同的使用环境选取不同的滤波方式。
猜你喜欢
微型电脑应用(2022年12期)2023-01-30 13:40:26
舰船科学技术(2022年21期)2022-12-12 08:07:10
科技风(2021年19期)2021-09-07 14:04:29
舰船科学技术(2021年12期)2021-03-29 01:28:44
电子制作(2019年13期)2020-01-14 03:15:32
制造技术与机床(2017年10期)2017-11-28 05:20:43
舰船科学技术(2016年1期)2016-02-27 15:39:26
舰船科学技术(2016年1期)2016-02-27 15:39:15
航海(2014年6期)2014-12-12 10:36:03
电测与仪表(2014年8期)2014-04-04 09:19:38
