
军事光纤有线通信组网故障定位算法研究∗
2020-06-19 06:14赵纪初王元斌
舰船电子工程 2020年4期
赵纪初 郭 勇 王 亮 王元斌
(1.海军研究院 北京 100036)(2.中国船舶重工集团公司第709研究所 武汉 430205)
1 引言
有线光纤通信是许多设备进行数据信息交互的主要手段,其畅通与否直接关系到装备作战使用的效能。在作战使用中大多光纤处于条件恶劣的环境和气候,其传输距离远、支线多,设备故障和自然环境的影响经常造成故障频发,一处小的问题就会间接地影响整个战斗行动,在提升装备损管能力水平上,准确及时地判断和定位故障是其重要内容。
一般的通信故障定位方法可以分为广域区段定位和距离判定法,前者利用的是多个线路终端(FTU)或者是通信故障告警器(FWI)实现故障定位,后者是利用光纤端口的信号衰减程度来估测计算断点距离该端口的距离[1]。随着技术水平的不断提升,目前一般采用线路终端自导通或者故障告警器来实现故障具体定位[2]。其过程一般分为检查光电转换器指示灯、跳线和尾纤的通断检测、使用OTDR(光时域反射仪)进行测试三个步骤[3]。但是,线路终端自导通的测试区域范围不够精准,有时范围太大而难以准确定位故障区段,而距离判定法即使用OTDR是基于区段相对确定的基础上进行的,外接故障告警器相对较为准确,但是其一般布置于相对静态且位置相对确定的区域,作战临时使用需要的是高度机动性,因此其不满足“快打快撤”的基本要求,所以较少使用。本文基于终端自导和故障告警器原理提出故障定位算法,该算法主要根据光电转换器指示灯提示信息对故障告警器进行逻辑状态编号,同时对网络进行拓扑描述分析和逻辑判断,并对拓扑网络中的节点进行逻辑标识,从而推算出故障点类型以及故障的位置。经过实地检验,该算法确实提升了故障定位的准确性,具有较高的实用性。
2 有线光纤通信拓扑描述模型
一般传统的图论描述方法分为有向图和无向图描述。例如在地方电网的建设与排故中[4~6]就是以图论为基础知识,根据配电网拓扑模型来建立相对应的故障判别矩阵,然后用故障判别矩阵推断和隔离故障区段。但是在军事装备通信中,例如舰载和车载设备中的光纤通信,经典的图论描述难以支撑复杂的光纤通信网络故障定位,随着接入设备的增加,经典拓扑模型构建的信息要素矩阵会呈现指数级的量级增大,显然经典拓扑描述只能适用相对简单的网络模型,而对于复杂的网络则显得力不从心[7]。本文在结合终端故障告警器状态标识的基础上,同时将其他具有特征状态的设备引入拓扑网络的节点描述,通过逻辑分类标识简化拓扑网络描述模型。
2.1 光纤终端故障告警器运行机制
故障告警器一般位于线路分支点和设备接线端口中段处,当光纤线路发生断路,或者在连接处的衰减超出阈值时,连接该线路端口设备故障告警器就会发光告警[8]。其与光纤链路本身会形成串联与并联的关系,在并联状态时,链路本身优先级高于告警器优先级,以此来判断两节点间的链路是否出现故障。因此,故障的位置和连接方式会间接的影响故障告警器告警规律,号手或维修人员需要根据告警规律迅速定位故障区段,并上报上级部门,同时利用端点自导通来缩小故障区段范围。这里以车载装备有线光纤通信为例,举个仅有单回路,且故障告警器连接方式为串联的例子,如图1所示,当故障点发生在A与A1之间时,故障告警器A1与A2会告警,其余告警器则不会告警。若故障点位于中继端设备A1-A’1中时,则所有故障告警器均告警。
2.2 光纤通信网络拓扑描述模型
一般通信网络能够以有线、无线或混合组网方式组成数据和话音通信网络。根据不同的战场环境以及内部系统各个节点的条件和状态,可分别组成各种不同类型的组网模式。这种算法在图论中也有较为详细的描述,其包括了组合算法、几何算法、多层划分法、谱方法等。在计算机分布式和并行计算中,经常利用图论划分来减少并行计算中的数据交互量,平均计算负荷,实现高效计算能力[9~13]。在军事光纤通信中通过有线、无线信道的协同控制,可以组成系统内部1:n个数据网和m个节点的话音网。其组网和控制功能包括:1)控制无线子网和有线子网,构建1:n星型网络。2)终端数据的分析、转发和差别控制。3)有线、无线话音的控制、交换,具有多种呼叫和接续工作方式。一般通信网络设备中都会携带小型数字交叉连接设备,能提供灵活的交换网络,实现任意n个E1信号和n个光口之间64KBPS的无阻塞交换网络,与端口控制器固定时隙交换,实现光纤有线网络组网。基于经典图论描述,本文结合告警器触发机制和光纤通信原理,以军事装备光纤通信为例,引入逻辑标识概念,对经典图论算法进行改进[14]。方法为“载体标识+设备标识+小数点+节点标识+分支节点标识+下级节点标识+…+末端节点标识”,为区别主线到支线,用字母A到Z来表示,若存在拓扑有向图则在后面定义“+”和“—”号,一般可以将“+”定义为星型网络中的中心节点或者其他网络中的相对中心的节点到支线节点的方向,即下行方向,“—”则表示是自下而上逆方向,即上行方向。用实线表示设备外部光纤连线,用虚线表示内部隐藏光纤连线。
另外,本文建立了基于拓扑模型“同胚”理论的标识,也就是说,在错综复杂的光纤网络中,可以利用“同胚”理论将网络的连通特性进行归类,而后将同一类的拓扑网络用二进制标识来表示该区域的类型,以机动车载装备的有线光纤通信为例,在简单的1:1网络中,一般情况下可归为4个可变通网络区域(只考虑粗实线部分),其拓扑网络就有24种表述形式,如“1000”就表示在第一个可变区域是连通的(平行),剩下3个区域是不连通(交叉)的情形,因此“0100”、“0010”、“0001”与其均为同胚拓扑构型,即单连通构型,它们具有相同的拓扑网络性质。类似,如“1100”、“1011”、“1111”等就属于双连通或多连通类型,原则是有交叉部分需要划一个区域,平行区域可根据标识的节点数量与分布情况任意划区,因此拓扑区域划分最小个数n≤节点标识总数m。同理,其他类型拓扑网络均可用该方式归类标识。如图2所示,例如“51.22+”表示5号载体连接设备1上在第2个故障告警器下行方向上第2个节点,因为案例中只考虑1:1连接情况,因此未存在主线和支线的拓扑关系。
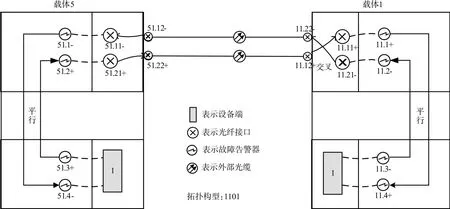
图2 光纤通信网络拓扑描述模型
2.3 故障要素集
一般故障告警器和设备端均有相应的标号,根据标号可以从装备信息数据库中查询到唯一的设备类型、生产日期及厂家、安装信息等要素,根据这些要素就可以迅速从备用装设备中找到合适的配件进行有效安装和调试,因此可以认为,上面一节定义的故障信息拓扑标识可以与具体的装设备信息要素形成一一对应,这个要根据装备具体型号具体分析和定义,比如可以制定一个简单的要素表,如表1所示。
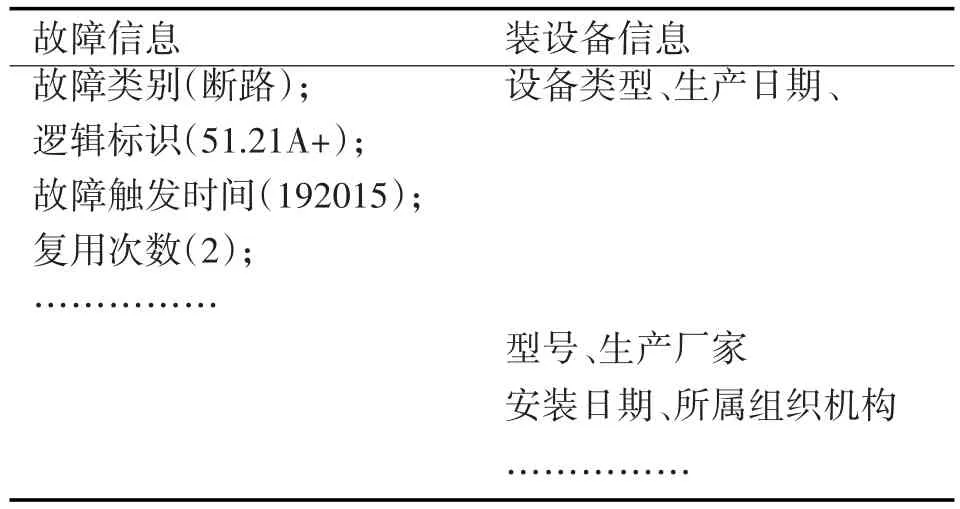
表1 信息要素表
3 改进矩阵定位算法分析描述
本文提出了对一般通用性光纤网络进行的两种设定与标识,第一种是从整体区域上进行类型和结构描述,在大多数情况下,光纤网络具有回路结构,因此根据连接情况可将网络拓扑构型的连通性进行归类,包含了单连通、多连通与不连通的情况,并用二进制进行逻辑标识。第二种是从细节上对其中的连接线、端口、告警器、设备等在拓扑网络中对应节点的位置进行逻辑标识,下面本文对已标识好的光纤通信网络进行矩阵算法描述,同样还是以军事装备之间的光纤通信为例进行分析。
3.1 光纤通信网络拓扑构型判别
结合图2中描述的1:1光纤通信网络为基础进行1:2的拓展分析,并将结构描述如图3所示。
图3是对1:2光纤通信系统进行了拓扑网络构建和节点逻辑标识,其中位于机柜上的收发接口以及可调整的连接线均改为对应的逻辑标识,在1:n的星型拓扑网络模式下以此类推。按照平行连通,交叉不连通的方式给该模型分类,则图3所构成的模型是(1101∪0100)构型,另外,结合实例的装设备情况,在默认内部光纤正常且只考虑外部光纤拓扑构型的情况下,位于机柜外部可改变的光纤组一共有8+3组(1:2模式),每辆分载体与主载体的有线通信相对独立,互不影响。那么总共可能出现的模式就一共有28+23种,根据拓扑构型分析可知其中种构型是同胚可导的,并且在预先未知装设备连接情况的前提下,其中随机出现的概率最大,因此对于作战中的装备光纤通信使用,判定有线通信拓扑构型对于后续的应急情况处置有重要的意义。
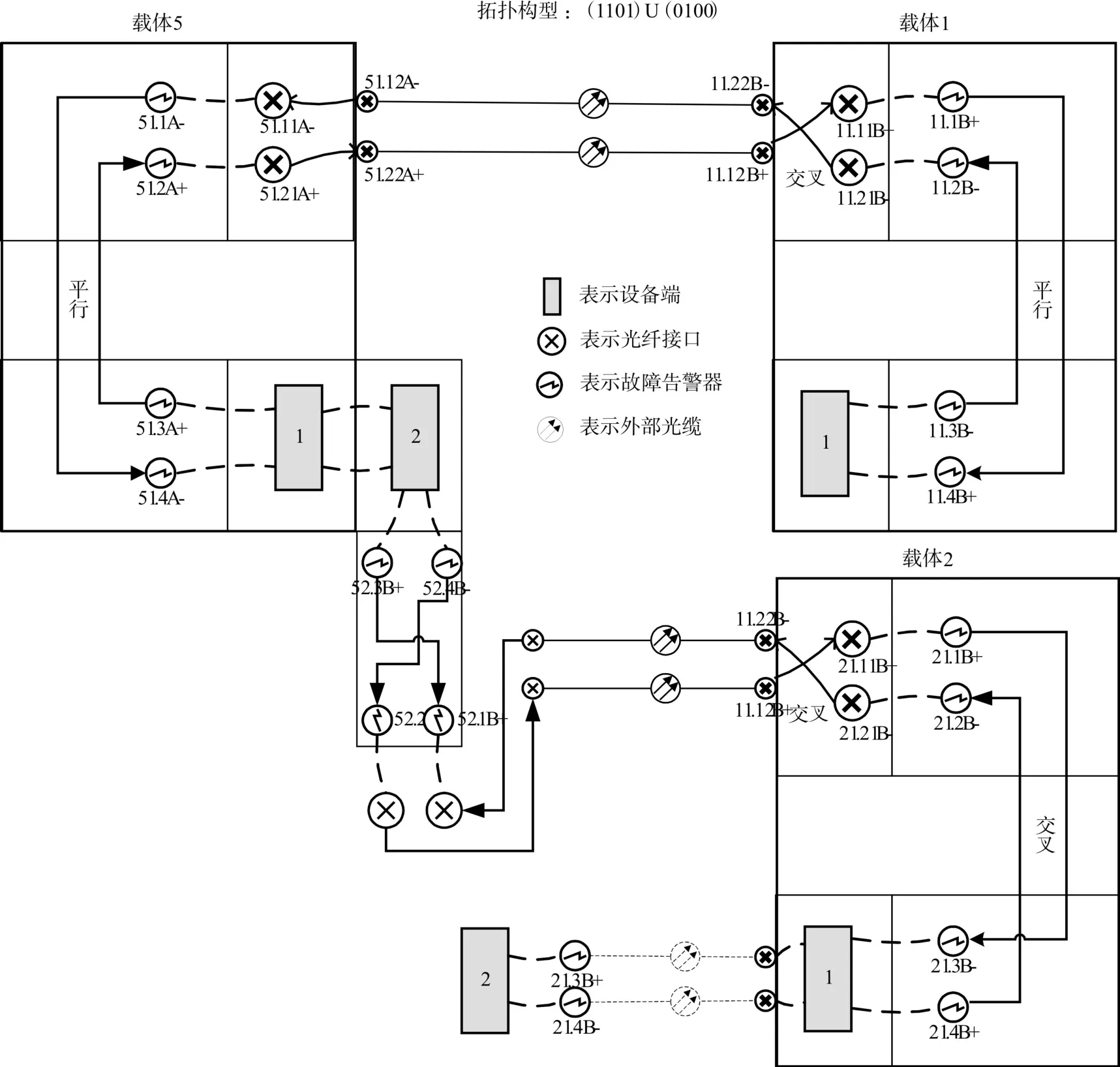
图3 光纤通信网络拓扑描述模型实例
3.2 故障定位信息矩阵
一般故障排除步骤是:1)定构型;2)找节点;3)多导通。本文将结合故障告警器信息要素用矩阵的形式进行描述,以达成后两步操作。在已知故障告警器串联于通信网络中时,通过拓扑构型和告警信息要素矩阵分析可以较为直接地推算故障大致区域,该算法在第4节案例分析中有说明。但是当未知网络拓扑构型且根据故障告警信息调试仍无法确定故障具体位置时,则必须基于已知信息,引入故障判别矩阵,这类算法在工程问题中有许多类似的应用,本文结合军事光纤通信排故的特有性质,提出相对应的矩阵描述,针对网络拓扑描述构型得到矩阵D,将逻辑标识的故障告警信息要素形成矩阵G,二者相乘得到故障判别矩阵P,根据该矩阵特征推测系统故障区域,其关键在于如何定义和构建D、G矩阵,以及P中的判定方法。
3.2.1 网络拓扑描述矩阵
结合图3中载体5和载体1的连接情况形成表格如表2。
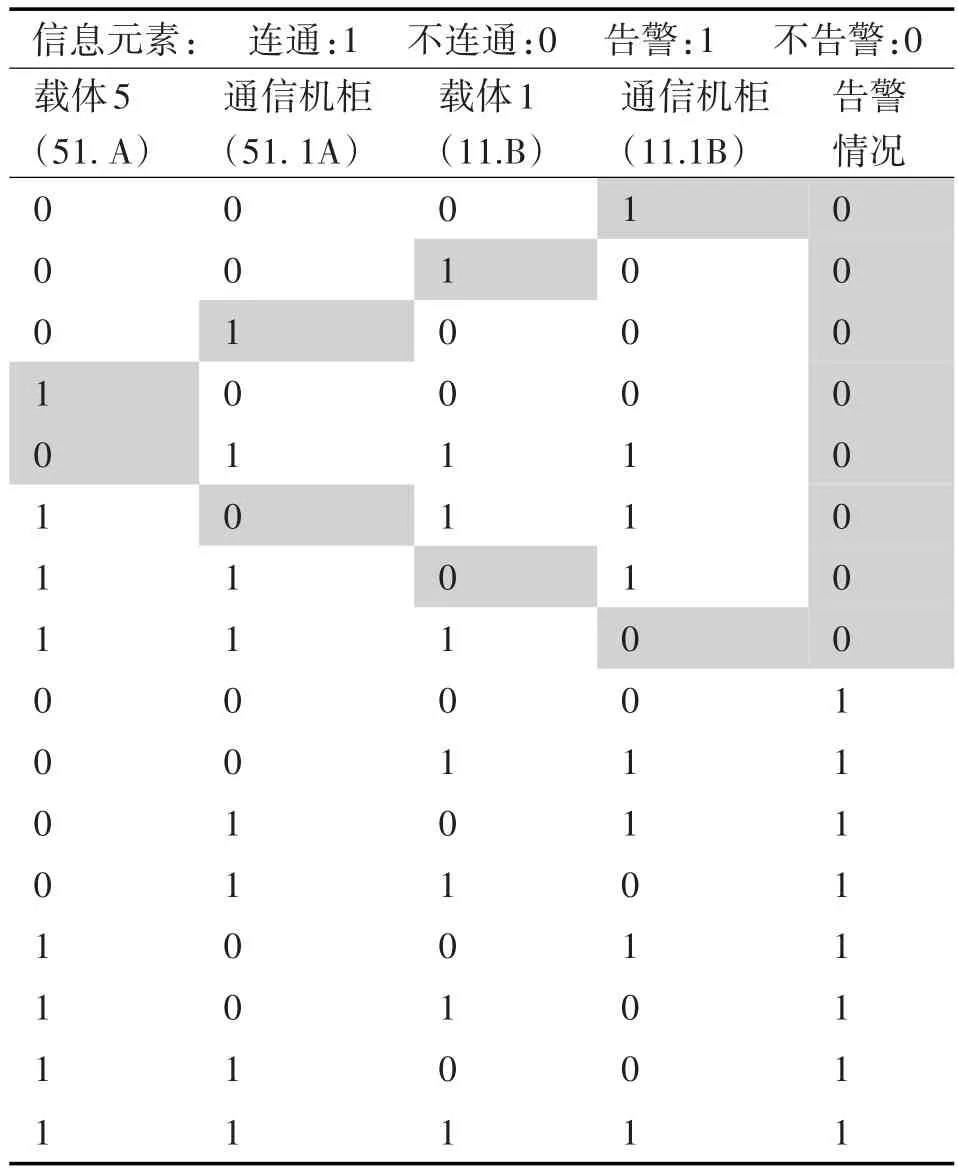
表2 网络拓扑描述信息要素表
从表2中可以发现从不导通的模式要变成导通的模式,最快最短的步骤只需要从外部四种连接状态中随机改动任意一处即可,在时间和条件允许的情况下,也可将光纤通信连接网络先设定成预定模式,如前八种拓扑模式。然后根据网络中的故障告警灯告警情况来判定下一步具体故障定位操作,这里本文将网络拓扑构型用一个n×1阶列矩阵来描述,例如11010 模式就表示成D=[1,1,0,1,0]T,矩阵阶数的定义是根据网络结构和实际需要来确定。
3.2.2 故障告警信息要素矩阵
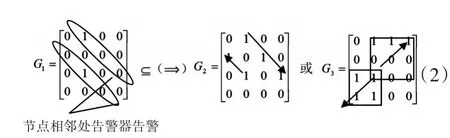
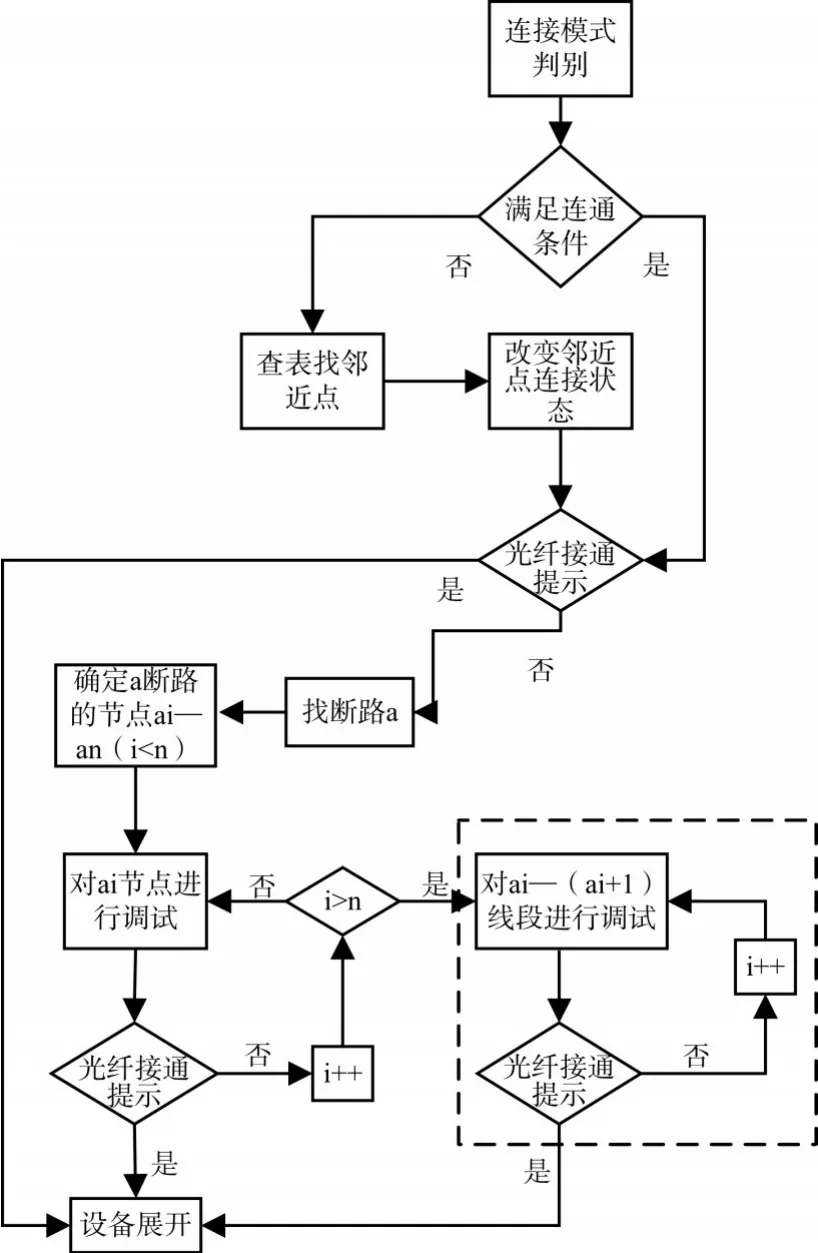
该要素矩阵分两种,一种是内嵌式不同级之间故障告警矩阵,用n×n阶矩阵来描述,另一种是外接式同级告警矩阵,用n×1阶矩阵来描述,本文重点对第一种情况进行研究分析。假设在光纤通信网络拓扑描述后共设定了m个带有逻辑标识的光纤端口节点,则故障告警器使端口节点两两相连且有向的连接情况共有种,一般情况下相邻节点中的告警器为串联,有间隔的节点之间为并联。对角线元素aij(i=j)表示同一层级节点内部的连接状态,其逻辑标识如51.11A-和51.11A+就为同级节点,只存在方向的不同。为使矩阵运算不涉及负数,定义矩阵上三角元素aij(i>j)表示方向为正的逻辑标识告警节点,其中aij(|i-j|=1)表示相邻的两个逻辑节点连线,aij(|i-j|=2)表示中间有1个节点间隔的连线,以此类推。矩阵下三角元素aij(i 随着装备不断发展,会出现更多的分布式网络接入,其逻辑标识中方向正负的定义会根据网络拓扑结构的改变和实际需要而发生相应变化。下面以m=4为例,构造如下故障告警信息要素矩阵(2),可知,位于a12和a32连接处的告警器告警。在不确定网络拓扑构型模式的前提下,无法准确定位故障具体位置。如已知拓扑构型仅为单连通模式D=[1,1,1,1]T,则G1包含于G2或G3,同理,已知G1即可推出G2或G3,即告警器并联时,上三角的节点往右上方向扩展,下三角的节点往左下方向扩展,告警器串联时,上三角的节点往右下方向线性扩展,下三角的节点往左上方向线性扩展。 3.2.3 故障判别矩阵 根据本文对光纤网络的拓扑构型描述,其形成n×1矩阵,故障告警信息要素形成n×m阶矩阵,一般情况下m=n,二者相乘可得n×m阶矩阵P,即为故障判别矩阵。可知,当网络拓扑描述元素均为1时,也就是假定整个拓扑网络是一个单连通构型时,则相乘得到的故障判别矩阵P必然是矩阵G本身,或者P包含矩阵G,若不包含其本身则可推断网络分区中必产生了交叉,导致整体未形成单连通构型,或者是网络中有隐藏层(内部光纤连接)未被包含在内。例如若得知故障告警矩阵情况如式(2)所示,一般情况下可断定a1-a2处(正向)和a3-a2处(逆向)均出现故障,但在仅仅导通a1-a2或a2-a2时,两处故障均恢复正常,仅仅导通a3-a2时,故障不变。显然可知a3-a2处出现交叉使得a1-a2处的故障引发逆向a3-a2线路中故障告警器的告警。所以在进行导通a3-a2的操作时,外部告警器与原网络形成并联构型,从而无法判断故障类别要素。 图4 故障定位算法流程图 图5 案例分析图 该算法基于光纤连接的基本拓扑网络模型结构,在终端自导之前根据终端自带的故障告警器提示,结合故障要素信息矩阵预先框定故障区段,具体算法流程如图4所示。 这里我们以图2情况为例进行算法分析,本例中光纤未通的告警信息有三种情况,一是载体5通和载体1不通,二是载体5不通、载体1通,三是载体5与载体1均不通。首先我们把光纤通信接线图进行逻辑标识,已知的拓扑网络构型为1110且故障告警器均串联于拓扑网络中,可拆解的断路有(51.1+—51.2+)(51.2+—51.3+)等共7段,以及它们之间的并集,同时,可调整的接口以及线段有(5.1—5.4)和(1.1—1.4)。按照前面分析的故障告警机制,假设当出现第一种情况时,首先可以判定(11.1+—11.2+—...—51.1-)是连通的,因此该线路上的所有节点均完好无需调试,需要对(51.1+—51.2+—51.3+—...—11.1-)链路上节点逐个进行调试,若所有节点均调试完毕故障仍复现,则需对节点之间的连线进行调试,方法就是对同一级的节点用外接故障告警器进行短接,直至找出断路具体位置。如图5所示,绿色部分为完好部分,红色部分为故障部分,在确定断点与断路时不能同时调试多个节点。 按照节点的逻辑标识,在有相邻故障告警器告警的情况下,根据标识追根溯源原则,选择标识靠前的去除标识靠后的,例如51.2+与51.3+同时告警,则选择51.2+与其之前的一个线段进行调试,而51.1-与51.2-同时告警,则选择51.2-与其之后的一个线段进行调试。在一般光纤线路中故障告警器串联于端口,均可按端口逻辑标识规律结合该算法来准确定位故障位置。 本文主要研究了光纤通信组网中故障定位的算法,较为详细和简明地分析了通信机理和故障告警触发机制,结合故障告警器和光纤连接方式构造了通信网络拓扑描述模型,并运用图论对其进行同胚性归类分析,并结合故障要素集提出了改进矩阵定位算法,对拓扑描述模型和故障告警信息进行矩阵表述并结合二者进行故障判别,对于装备管理与运用和提升应急情况处置效率起到了帮助作用,本文分析的情况涵盖了多数装备通信的基本特征,具有一定的通用性和实操性,利用该理论和算法能够快速准确定位故障类型和故障位置,大大提升故障排除效率,对装备管理综合水平和作战能力提升起到推动的作用。
4 案例分析

5 结语
猜你喜欢
军民两用技术与产品(2022年1期)2022-06-01
西北工业大学学报(2022年1期)2022-04-22
汽车工程学报(2021年3期)2021-06-16
中学生数理化(高中版.高考理化)(2021年12期)2021-03-08
汽车实用技术(2019年6期)2019-04-11
通信产业报(2018年26期)2018-11-22
中学物理·初中(2017年8期)2018-03-06
电子技术与软件工程(2016年23期)2017-03-06
数字技术与应用(2016年9期)2016-11-09
电脑知识与技术(2016年21期)2016-10-18
