侧风作用下货车驾驶员反应行为模型
2020-06-17 02:12彭浩荣马小翔梁洁馀潘晓东
同济大学学报(自然科学版) 2020年5期
陈 丰,彭浩荣,马小翔,梁洁馀,潘晓东
(同济大学道路与交通工程教育部重点实验室,上海201804)
大跨桥梁通常周边环境空旷,桥面位置高,桥上行驶的车辆经常受到侧风的影响。强烈的侧风作用可能导致行驶车辆发生侧偏、侧滑甚至是侧翻,引发严重的交通事故[1],而货车是发生这些事故的主要车型[2]。为预防风致行车事故、降低事故严重程度,国内外学者对大跨桥梁侧风行车安全进行了广泛的研究[3-6]。当车辆在大跨桥梁上行驶时,车辆的动态响应不仅受到侧风的影响,也受到风-车-桥耦合作用的显著影响[7-8]。因此,Xu 和Guo[9]、Cai 和Chen[10]、韩万水和陈艾荣[11]分别建立了风-汽车-桥梁耦合系统分析框架,并对侧风作用下货车的行车安全进行了分析[12-14]。这些研究成果对降低大跨桥梁风致行车事故风险具有重要的理论意义和实用价值。
此外,作为“人-车-路-环境”交通系统中的关键因素,驾驶员对风致行车安全具有至关重要的影响。在侧风作用下,驾驶员会不断调整方向盘以保持车辆平衡。因此,有必要将驾驶员的操纵行为融入风-车-桥耦合分析框架中。Baker[15]首先提出了一个转向角模型(Baker 模型)来描述侧风作用下驾驶员的反应行为。在此基础上,Chen 和Cai[16]采用前轮而非车体重心处的侧向运动变量,改进了Baker 模型。2008年,马麟[17]将改进的Baker模型融入到风-车-桥耦合分析中,建立了考虑驾驶员行为的风-车-桥耦合振动分析框架。诚然,侧风作用下驾驶员反应行为模型的引入在一定程度上提升了风-车-桥耦合作用下行车安全分析的可靠性。但是,现有的Baker模型及其改进模型都是基于假设而没有经过实际数据的验证[18]。
而在过去的二十年中,由于能提供安全、可控、经济高效的实验条件,且能最大限度将驾驶员行为考虑其中,驾驶模拟器已经成为研究驾驶安全问题的有效工具。2006 年,Maruyama 和Yamazaki[19]采用驾驶模拟器研究了强侧风作用下小轿车的行驶稳定性。2015年,Rodriguez等[20]通过修改驾驶模拟器参数研究了强风环境下大巴车、小轿车和救护车的动态响应。2019年,Chen等[21]采用驾驶模拟器实验对桥隧连接段侧风作用下货车行驶安全性进行了分析。潘晓东等[22]基于8 自由度驾驶模拟器,提出了风-车-桥耦合作用下大跨桥梁驾驶模拟实验方法,为后续的研究提供了良好的基础。
本文研究内容是基于潘晓东等[22]研究开展,目的是通过驾驶模拟器实验,建立侧风作用下货车驾驶员反应行为模型。本文基于8 自由度驾驶模拟器,建立了风-车-桥耦合作用下大跨桥梁驾驶模拟平台。通过驾驶模拟实验,采集了侧风作用下驾驶员反应行为及车辆动态响应数据,建立了两阶段驾驶员反应行为模型。研究成果可用于风致行车安全分析,为完善风-车-桥耦合系统分析框架提供参考。
1 侧风作用下驾驶模拟平台建立
1.1 实验场景建立
基于同济大学交通安全研究联合实验室的8自由度驾驶模拟器,建立了大跨桥梁行车实验场景。首先,采用SketchUp 建立大跨桥梁三维模型;接下来,通过导入Google Earth 中周边场景地图,进行贴图处理,增加实验场景的视觉真实性;最后,将视觉场景导入驾驶模拟软件SCANeR 中,设置道路逻辑层,完成实验场景的建立。
大跨桥梁实验场景如图1 所示,主跨372.5 m,加上两侧分跨,桥梁试验段全长840 m。桥梁设计速度80 km·h-1,横断面为双向4 车道,车道宽度3.75 m,两侧路肩宽2.5 m。
1.2 厢式货车模块
驾驶模拟实验中的使用的厢式货车模块如图2所示。该模块基于实际的两轴厢式货车开发,车辆总长7.05 m,宽2.10 m,轴距3.60 m,空载时总重量4 300 kg。驾驶员视点高度与实际货车驾驶过程中高度保持一致。方向盘、刹车和油门的力反馈均根据厢式货车力反馈参数调整。此外,多通道声音系统能够模拟真实货车行驶发出的声音,提高了驾驶员模拟驾驶体验的真实性。
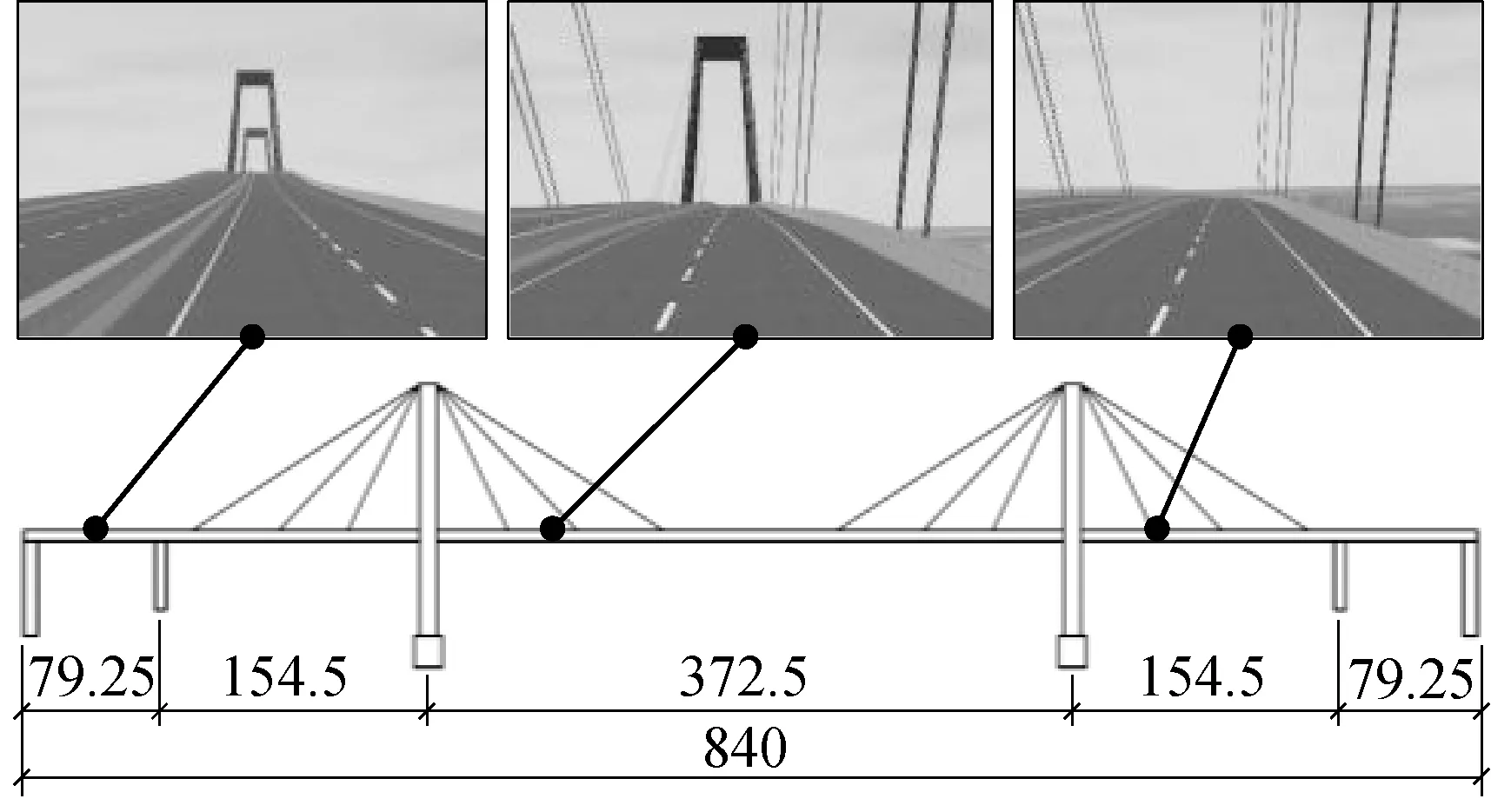
图1 大跨桥梁实验场景(单位:m)Fig.1 The experimental scenario of long-span bridge(unit:m)

图2 驾驶模拟实验中的厢式货车模块Fig.2 The box truck module in the driving simulator experiments
1.3 侧风作用输入
相关文献表明[14,18],当桥面侧风风速达到约72 km·h-1时,空载厢式货车的行驶安全受到威胁。为保证驾驶模拟实验的有效性和可操控性,需要先通过预实验,确定驾驶模拟实验中所要加载的侧风风速[22]。实验结果表明,风速为30 km·h-1(相当于桥面四级风)及以下的侧风对空载厢式货车的行驶无明显影响,而风速达到70 km·h-1(相当于桥面八级风)的侧风会导致驾驶员难以操控车辆,车辆严重偏出行车道甚至与护栏发生碰撞。因此,选取40、50 和60 km·h-1作为驾驶模拟实验中的侧风风速。
针对大跨桥梁实验场景,需考虑风-车-桥耦合作用,包括风-车相互作用和侧风作用下的车-桥耦合作用。根据Cai 和Chen[10]建立的风-车-桥耦合分析框架,分别计算侧风风速为40、50和60 km·h-1时风-车-桥耦合作用对车辆产生的作用力,并通过编写脚本将风-车-桥耦合作用融入驾驶模拟器中,详细的风-车-桥耦合作用输入过程可参见文献[22]。
2 侧风作用下驾驶模拟实验
2.1 驾驶模拟器
侧风作用下驾驶模拟实验在同济大学交通安全研究平台的8自由度驾驶模拟器中进行。该驾驶模拟器内置车辆为雷诺Megane III,设置了包括刹车、油门和方向盘在内的力反馈系统。通过5个内置投影仪把驾驶场景投射在一个水平视角为250°的环形屏幕上,场景刷新频率为60 Hz。车辆行驶时的声音通过多通道声音系统模拟。
2.2 实验驾驶员
本次驾驶模拟实验共招募某物流公司职业货车驾驶员32名,全部为男性。32名驾驶员全部完成侧风作用下驾驶模拟实验任务,且没有出现眩晕、恶心等驾驶模拟不良反应。参与实验的驾驶员平均年龄32.1岁(标准差:8.26年),平均驾龄5.7年(标准差:3.02年)。
2.3 侧风工况
在正式的实验中,货车行驶到桥梁段之后,随机加载侧风,每个工况侧风作用持续时间为10 s。每位驾驶员分别进行6次行车模拟驾驶,每次经历1种工况。6种侧风工况如表1所示:风向与车道方向垂直,90°表示从左向右,-90°表示从右向左;侧风风速分别为40、50或60 km·h-1。
为了尽可能减小侧风工况次序所引起的实验偏差,对6 种侧风工况进行了排列。针对不同的驾驶员,随机选取不同的侧风工况次序进行实验。

表1 驾驶模拟试验侧风工况Tab.1 Crosswind conditions in the driving simulator experiments
2.4 实验步骤
首先,对实验驾驶员进行驾驶模拟器基本操作培训,明确在实验过程中应遵守的行为规范。每位驾驶员需要在高速公路场景中完成10 min的培训驾驶,经历加减速、平稳驾驶、变道和进出匝道等行驶过程,熟悉对实验车辆方向盘、刹车和油门的操控。
若驾驶员在培训驾驶过程中没有出现不适,则在休息10 min之后进行正式的侧风作用下驾驶模拟实验。驾驶员需要完成大跨桥梁驾驶任务,随机经历6种侧风工况。驾驶员不会被提前告知遭遇侧风的位置、风速和风向。要求驾驶员将车辆加速到80 km·h-1左右,保持在左侧车道行驶,不能随意变道。
每位驾驶员总共完成6次侧风作用下的模拟驾驶,加上模拟器复位启动等过程,每次模拟驾驶耗时约5 min。完成模拟驾驶之后,驾驶员需填写个人基本信息,包括性别、年龄、驾龄、驾驶频率等,并对驾驶模拟实验场景及驾驶操作的真实性进行评价。每位驾驶员完成整个实验平均需要1 h。
2.5 数据采集
驾驶模拟器可采集包括方向盘转角、车辆侧向位移和车辆横摆角在内的400多种数据。本次实验中,主要关注侧风作用下车辆的动态响应及驾驶员的反应操纵行为,从驾驶模拟器中提取了车辆侧向位移、侧向位移速度、横摆角、横摆角速度、车轮转向角、方向盘转角、方向盘反馈力矩等数据,采样频率为20 Hz。
3 驾驶员反应行为模型
3.1 侧风作用下货车动态响应
为完整地展现侧风作用下车辆的动态响应过程,侧风出现前10 s 和侧风结束后10 s 的车辆动态变化也将呈现在以下的分析中。
3.1.1 车辆侧向位移
在驾驶模拟实验中,车辆的中心位置一开始处在车道中心线上。车辆的侧向位移指的是车辆中心与车道中心线之间的距离。图3所示为不同侧风工况下32 位驾驶员驾驶货车行驶的侧向位移的平均值的变化,图3a 中侧风风向从右到左,图3b 中侧风风向从左到右。在实验中,车道宽度3.75 m,厢式货车宽度2.1 m,因此,侧向位移大于0.825 m 则表示车辆超出车道线进入相邻车道或路肩,车辆的行驶安全性受到严重的威胁。
从图3可以看出,在遭遇侧风之前,货车靠近行车道中线行驶;在侧风的作用下,车辆的侧向位移迅速增大,达到峰值之后回落,随后保持稳定;在侧风作用突然消失之后,车辆的侧向位移向反方向突然变化,随后车辆向车道中线靠拢。在侧风作用下,车辆侧向位移的最大值随着风速的增加而增大,车辆发生侧滑引起的事故风险增加。
3.1.2 车辆横摆角速度
车辆的横摆角速度可用来表征侧风作用下车辆的行驶稳定性[21-22]。驾驶模拟实验中,不同侧风工况下车辆横摆角速度平均值的变化如图4所示。在遭遇侧风作用之前,车辆横摆角速度在0°附近小范围波动;在侧风作用下,车辆横摆角速度先是突然增大到第一个峰值,随后迅速向反方向变化,在波动中逐渐稳定;在侧风作用突然消失之后,车辆横摆角速度也呈现出类似的变化规律。从图4 可以看出,侧风作用下,车辆横摆角速度的第一个峰值随着侧风风速的增加而增大,车辆的行驶稳定性变差。
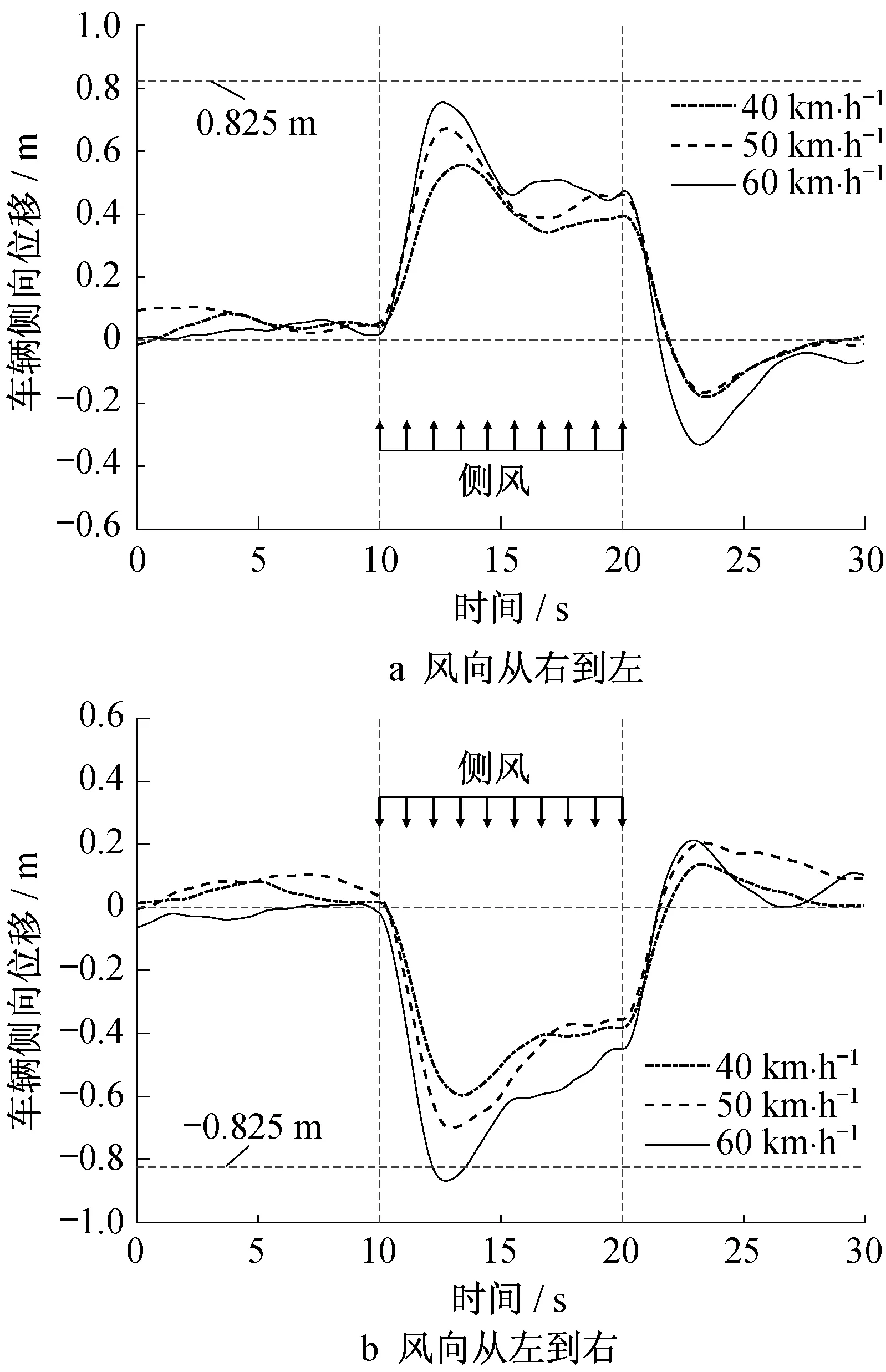
图3 侧风作用下车辆侧向位移Fig.3 Lateral displacement of the moving truck under crosswinds
3.1.3 方向盘反馈力矩
在驾驶过程中,方向盘反馈力矩,能通过触觉感知为驾驶员提供车辆的行驶状态、车轮的运动状态以及路面情况等信息,是影响驾驶员操纵判断的重要因素之一[23]。不同侧风工况下方向盘反馈力矩的变化过程如图5所示。已有的侧风作用下驾驶员反应行为模型[15-16],认为车辆转向角主要与车辆的侧向位移、横摆角等运动状态变量有关,忽略了受力感知对驾驶员反应行为的影响。诚然,视觉是驾驶员获取环境信息的主要来源,车辆运动状态的变化确实能够给驾驶员提供重要的决策信息。但是,在车辆受到突然的侧风作用时,车轮的偏转及车辆行驶方向变化的趋势等信息能够通过方向盘反馈力矩及时地传递给驾驶员。特别是在突遇侧风这种情况下,触觉感知与车辆发生明显的侧向位移之后的视觉感知具有明显的区别,触觉感知更及时、更强烈。因此,侧风作用下驾驶员反应行为模型的建立过程中,有必要考虑方向盘反馈力矩的影响。

图4 侧风作用下车辆横摆角速度Fig.4 Yawing rate of the moving truck under crosswinds
3.2 侧风作用下驾驶员反应行为
根据3.1 节前面的车辆行驶特征分析可知,在突然的侧风作用下,车辆的侧向位移和横摆角速度都会急剧地增大,车辆的行驶稳定性和安全性受到严重的威胁。驾驶员需要通过控制方向盘来调整车辆行驶的方向,由此减小车辆的侧向位移和降低车辆横摆角速度的波动幅度。此外,方向盘反馈力矩能够通过触觉感受为驾驶员提供侧风作用下车辆行驶状态等信息,对驾驶员的反应操纵行为具有重要的影响。
在已有的侧风作用下驾驶员操纵模型中,均采用车辆前轮转向角来表示驾驶员的操纵行为[15-16]。而针对同一辆货车,方向盘转角和转向角之间存在固定的比例关系。因此,本文采用车辆转向角的变化来展现侧风作用下驾驶员的操控行为。侧风作用前后,车辆转向角的变化过程如图6所示。

图5 侧风作用下方向盘反馈力矩Fig.5 Steering wheel torque feedback of the moving truck under crosswinds
从图6中可以看出,在侧风作用之前,车辆转向角在0°附近小范围波动。根据车辆转向角的符号定义为左正右负可知,在侧风的突然作用下,车辆转向角顺着侧风方向出现第一个峰值。双因素方差分析结果表明,不同风速(显著性水平p=0.13 >0.05)和不同风向(p=0.79 >0.05)对第一个峰值出现的时间均没有显著的影响。计算得到,6种不同侧风工况下32 位驾驶员操纵得到的车辆转向角第一个峰值出现的平均时间为侧风开始作用之后0.23 s(标准差0.06 s)。此后,车辆转向角反向增大到最大值,随后有所回落并保持在某一角度附近上下波动,逐渐趋于稳定。
在Baker[15]提出的侧风作用下驾驶员转向模型中,驾驶员反应时间取值为0.25 s。本文以车辆转向角第一个峰值出现的时间作为驾驶员反应时间,根据驾实验结果,取值为0.23 s,与Baker模型相近。以驾驶员反应时间为界线,可以将侧风作用下车辆转向角的变化过程分为两个阶段。第一个阶段为侧风开始作用到驾驶员开始做出反应的阶段。在这个阶段,由于侧风的突然出现,驾驶员需要一定的反应时间才能对侧风产生的影响做出反应,车辆转向角在侧风作用下沿着侧风方向变化,驾驶员对车辆的操纵是侧风作用之前操作行为的惯性延续。第二个阶段为驾驶员开始做出反应到侧风作用结束的阶段。在这个阶段,驾驶员对侧风作用的影响做出反应,车辆转向角在侧风和驾驶员主动操作的共同作用下趋于稳定。基于以上分析,接下来进行侧风作用下货车驾驶员反应行为模型的建立。

图6 侧风作用下车辆转向角Fig.6 Steering angle of the moving truck under crosswinds
3.3 驾驶员反应行为模型
Baker假设在侧风作用下,驾驶员将根据车辆的侧向运动调整车辆转向角,提出了Baker 模型[15],公式如下:

式中:δ 为车辆转向角;λ1和λ2为与驾驶员有关的参数;t 为侧风开始作用之后的时间;Y 和Y˙分别为车辆质心的侧向位移和侧向位移速度;ε为驾驶员的反应时间,取值0.25 s,并认为当时间t <ε 时,车辆转向角δ=0。
基于车辆转向角应根据修正车辆前轮的侧向位移而调整的假设,Chen 和Cai[16]采用车辆前轮而非车体重心处的侧向干扰运动作为变量提出了一个与Baker模型相类似的驾驶员转向模型,表达式如下:

式中:R为车辆转弯半径;L1和L2分别为车辆质心到前轴和后轴的距离;ψ和ψ˙分别为车辆的横摆角和横摆角速度。
在Baker模型中,假设转向角与车辆侧向位移和侧向位移速度有关。Chen和Cai增加了车辆横摆角和横摆角速度两个变量。此外,方向盘反馈力矩也是影响驾驶员反应行为的重要因素之一。为确认上述变量对驾驶员反应行为的影响,本文对驾驶模拟实验采集的车辆转向角、侧向位移、侧向位移速度、横摆角、横摆角速度和方向盘反馈力矩数据进行相关性分析,并选取关键变量建立侧风作用下货车驾驶员反应行为模型。
根据侧风作用下车辆转向角的两阶段变化过程,本文尝试建立两阶段驾驶员反应行为模型。第一阶段从侧风开始作用(t=0 s)到驾驶员开始做出反应(t=0.23 s),为驾驶员的被动反应阶段。第二阶段从驾驶员开始反应到侧风作用结束(0.23 s <t ≤10 s),为驾驶员主动稳定阶段。其实Baker模型本质上也是两阶段模型,该模型假设在第一阶段车辆转向角δ=0,第二阶段模型如式(1)所示。但Baker模型对第一阶段模型的假设不符合实际,而第二阶段模型并未经过实际数据的验证。接下来,本文根据驾驶模拟实验数据建立驾驶员反应行为模型,随机将32 个样本(包含6 种侧风工况的实验数据)按照7:3划分为训练集(包含22位驾驶员实验数据)和测试集。针对训练集数据,分两阶段进行各变量的相关性分析,结果如表2和表3所示。表2和表3中,所有数值均为Pearson相关性系数r。

表2 侧风作用下车辆转向角变化第一阶段各变量相关性分析Tab.2 Correlation analysis of variables in the first-level of steering angle change under crosswinds
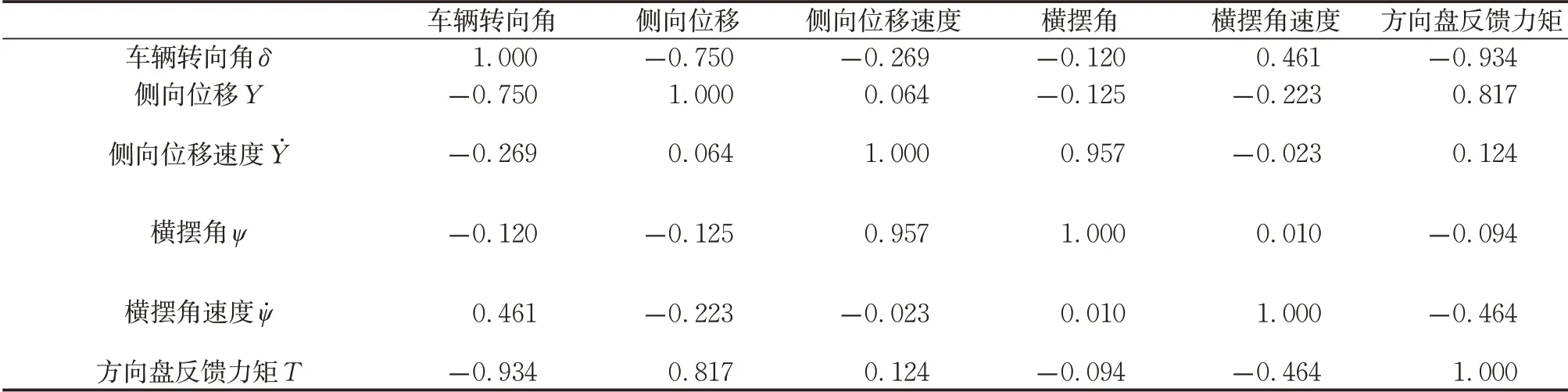
表3 侧风作用下车辆转向角变化第二阶段各变量相关性分析Tab.3 Correlation analysis of variables in the second-level of steering angle change under crosswinds
驾驶员反应时间ε为两阶段划分的依据,本文中ε=0.23 s。在第一阶段,由表2可知,车辆转向角与横摆角速度显著相关(r=0.759),与横摆角(r=-0.362)和方向盘反馈力矩(r= -0.490)也有一定的相关性。选取横摆角、横摆角速度和方向盘反馈力矩三个变量建立如下模型:

式中:λ3为与驾驶员有关的参数;t为侧风作用时间。采用Matlab 进行多元线性回归分析,得到可决系数R2=0.88,p<0.001,通过基于方差膨胀因子(variance inflation factor,VIF)的多重共线性诊断,模型中不存在多重共线性。得到第一阶段驾驶员反应行为模型如下:

采用测试集数据对该模型进行评估,得到测试集可决系数R2=0.86,可认为模型较好地反映了第一阶段驾驶员反应行为。
在第二阶段,由表3可知,车辆转向角与方向盘反馈力矩显著相关,而侧向位移与方向盘反馈力矩(r = 0.817)、横摆角与侧向位移速度(r = 0.957)具有较强的相关性,为避免多重共线性不能都选入作为模型变量。因此,选取车辆侧向位移速度、横摆角速度和方向盘反馈力矩三个变量建立如下模型:

多元线性回归结果可决系数R2=0.90,p<0.001,通过基于VIF 的多重共线性诊断,模型中不存在多重共线性。得到第二阶段驾驶员反应行为模型如下:

采用测试集数据对模型进行评估得到可决系数R2=0.86,可认为模型较好地反映了第二阶段驾驶员反应行为。
4 结语
(1)本文基于风-车-桥耦合作用下大跨桥梁驾驶模拟平台,招募职业货车驾驶员进行了侧风作用下驾驶模拟实验。分析了侧风作用下货车的动态响应特征和驾驶员反应行为特征。
(2)在侧风作用下,方向盘反馈力矩能让驾驶员及时感知到车辆的受力状况。通过驾驶模拟实验数据的相关性分析表明,方向盘反馈力矩是影响驾驶员反应行为的关键因素之一。
(3)根据侧风作用下车辆转向角的变化过程,以驾驶员反应时间为界线,可将侧风作用下驾驶员反应行为划分为两个阶段。本文基于驾驶模拟实验数据,建立了侧风作用下两阶段驾驶员反应行为模型,考虑了方向盘反馈力矩对驾驶员反应行为的影响。该模型有望用于风致行车安全分析,可为风-车-桥耦合系统分析框架中考虑驾驶员反应行为提供参考。
猜你喜欢
军民两用技术与产品(2022年2期)2022-06-01
汽车实用技术(2022年5期)2022-04-02
北京航空航天大学学报(2021年4期)2021-11-24
小哥白尼(趣味科学)(2021年6期)2021-11-02
故事作文·高年级(2021年4期)2021-05-06
小哥白尼(神奇星球)(2021年11期)2021-03-08
现代职业教育·中职中专(2017年11期)2017-07-09
汽车文摘(2015年11期)2015-12-02
云南中医学院学报(2012年3期)2012-07-31
中国新技术新产品(2010年11期)2010-01-01