
问时、问刻凸轮结构设计小探
2020-06-17 03:26:12马涛天王电子深圳有限公司
钟表 2020年2期
马涛 天王电子(深圳)有限公司
问表机心结构复杂,却又制作精良,受到世人的追捧,问表基本的打簧原理也为大家所熟知,但是问表设计的一些细节却不甚明了。本文重点论述与问时、问刻凸轮结构有关的结构、原理和设计,讨论凸轮结构固有的结构缺陷,以及针对这些缺陷采取的应对措施。
声明:
考虑到语义的唯一性,作以下声明:
(1)启动问表功能的过程或动作称为打簧,避免使用报时(间)的称呼,比如,开启问表进行打簧,而不是开启问表进行报时(间)。和问表启动、上条、限速等有关的零件均是打簧零件,例如,打簧发条、打簧限速轮。
(2)报小时的过程或动作称为报时,报刻的过程或动作称为报刻,报分钟的过程或动作称为报分。
(3)进行报时、报刻、报分的零部件分别是问时零件、问刻零件、问分零件,例如,问时齿条、问刻齿条、问分齿条。
1 时间的读取原理
1.1 时、刻信息的读取
二问打簧表与三问打簧表读取时、刻的方式是相同的,因此只需要理解其中之一即可。本文以结构相对简单的二问打簧表为基础对时、刻的读取结构进行论述。
图1为二问打簧表的常见结构,所有的零部件均处在初始位置。当进行打簧操作时,逆时针滑动问表的拨杆1,拨杆1推动打簧上条轮2围绕转轴O1逆时针转动;打簧启动轮4与打簧上条轮2通过齿轮啮合,并与问刻凸轮6和问时齿条7共同连接在打簧条轴5的方榫上,在打簧上条轮2的作用力下围绕打簧条轴5进行顺时针转动。当问时臂3与问时蜗形凸轮12接触后,问刻齿条8被释放;在问刻簧9的弹力作用下,问刻齿条8围绕其转轴O2顺时针转动,直到其问刻臂B与问刻蜗形凸轮10接触,停止转动。至此,时、刻信息的读取工作全部完成,结果如图2、图3、图4所示。

图1 二问打簧机心
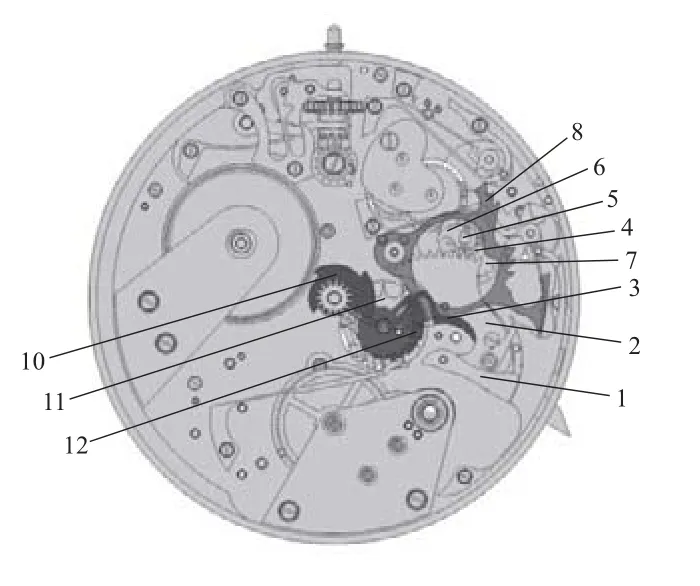
图2 时间读取结果(12时3刻)

图3 刻的读取
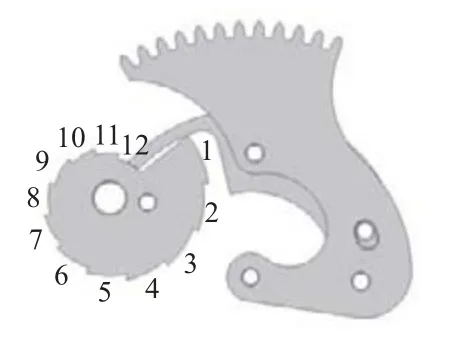
图4 时的读取
1.2 时、刻信息的离散化
在机械表中,虽然擒纵调速机构控制齿轮、指针等逐步转动,但是因为周期很短,齿轮、指针看上去依然是延续走动的。而对于问表来讲,我们希望得到离散的、可读取的信号,比如,“时”被分成了12份,“刻”被分成了4份,“分”被分成了15份,均是离散的。
如果我们把齿轮的转动看作是模拟信号,问表读取和打簧的信息为数字信号,那么二者之间就需要一个模数转换结构。该模数转换结构是通过蜗形凸轮实现的。
如图3所示,问刻蜗形凸轮10有4个台阶,分别代表着0~3个刻,它与分轮连接,与分轮一起转动。当问刻臂B停靠在问刻蜗形凸轮10的不同台阶上时,问刻齿条8围绕其转轴O2顺时针转过不同的角度,使问刻齿条8的尖齿C1、C2(图3所示)滑过对应的问刻棘爪15一定的齿数,如图5所示。

图5 问刻时停靠的台阶与尖齿过的齿数示意图

图6 问时时停靠的台阶与尖齿过的齿数示意图。
时的读取方式与刻基本一致,在图1和图2中,当问时臂3停靠在问时蜗形凸轮12的不同台阶上时,问时齿条7围绕其转轴5(即打簧条轴5)顺时针转过不同的角度,使问时齿条7上的问时尖齿滑过问时棘爪14一定的齿数,如图6所示。
蜗形凸轮不同台阶的高度(或深度)、问刻齿条及问时臂转过的角度和问时问刻尖齿滑过相应棘爪的齿数有固定的对应关系。滑过的齿数就是我们需要的敲击声数,这样,连续的走时信号转换成离散的整数敲击信号,完成了模数转换。
问刻臂B停靠的台阶编号(0~3)即为问刻齿条8的尖齿C1、C2滑过问刻棘爪15的齿数。问时臂3停靠的台阶编号(1~12)即为问时齿条7尖齿滑过的齿数。
2 打簧功能
2.1 报时
时间经过读取之后,释放拨杆1,打簧发条开始释放力矩,首先进行报时,报时之后进行报刻。在报时阶段,打簧发条带动问时齿条7逆时针转动一定的角度。在该角度内,问时尖齿拨动问时棘爪14,带动问时音锤敲击音簧,实现报时。
图7、图8为12时3刻打簧过程中的报时示意图,分别为报时(图7中开始敲击第九个声音)、报时结束报刻开始时零件位置。图中,70所示的实线为报时开始时问时齿条7的初始位置,角度α为报时阶段问时齿条7(以及问刻凸轮6)转过的角度。图8中的角度α为报12时转过的角度,即线S1和 S12之间的夹角,其中线S1为报时结束报刻开始的一瞬间,问时齿条7的最后一个尖齿齿尖与回转轴的连线,S12为 进行12时报时的初始位置。如果将线S1和S12之间的夹角α平均分成12份,那么进行其他时间报时时,可作如下理解:以线S1所在位置为问时齿条7报时的零位,如果报n时,那么问时齿条7的报时初始位置为从线S1顺时针转过nα/12的位置,该角度下有n个齿滑过问时棘爪14,这与前述是对应的;当问时齿条7逆时针转动进行报时时,问时尖齿拨动问时棘爪14共计n次,带动问时音锤敲击音簧n次,实现报时。

图7 报时示意图
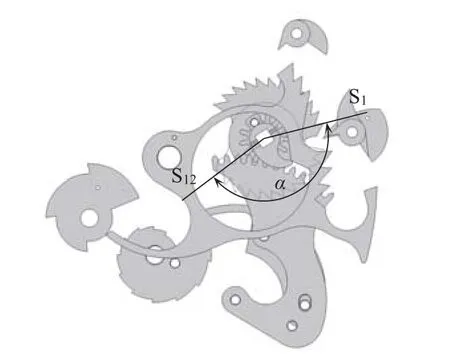
图8 报时结束报刻开始时零件位置
2.2 报刻
图8所示状态的下一瞬间即进入报刻的作用范围。问刻凸轮6转过角度α之后与问刻齿条8接触,并在打簧发条释放力矩的作用下驱动问刻齿条8逆时针转动。问刻齿条8的尖齿C1、C2(图3所示)拨动对应的问刻棘爪15,带动问刻音锤敲击音簧,实现报刻。尖齿C1、C2先后拨动对应的问刻棘爪15,存在的时间(角度)间隔使我们听到“叮当”的组合报刻音。
图9、图10为12时3刻打簧过程中的报刻示意图,分别为报刻(图9中开始敲击第二个组合报刻音)、报刻结束时零件位置。图中,80所示的实线为报刻开始时问刻齿条8的初始位置,角度β为报刻阶段问刻凸轮6(以及问时齿条7,此时空转)转过的角度,角度γ为在问刻凸轮6的驱动下问刻齿条8转过的角度。图10中,角度γ为线K0和K3之间的夹角,其中线K0为报刻结束时问刻尖齿C1的最后一个齿的齿尖与转轴O2的连线,K3为报3刻的初始位置。与报时结构相似,如果将线K0和 K3之间的夹角γ平均分成4份,那么进行其他时间报刻时,可作如下理解:以线K0所在位置为问刻齿条8报刻的零位,如果报m刻,那么问刻齿条8的报刻初始位置为从线K0顺时针转过 (m+1)γ/4的位置,该角度下有m个齿滑过问刻棘爪15,这与前述是对应的;当问刻齿条8逆时针转动进行报刻时,问刻尖齿C1、C2分别拨动对应的问刻棘爪15各计m次,带动相应的问刻音锤敲击音簧m次,实现报刻。
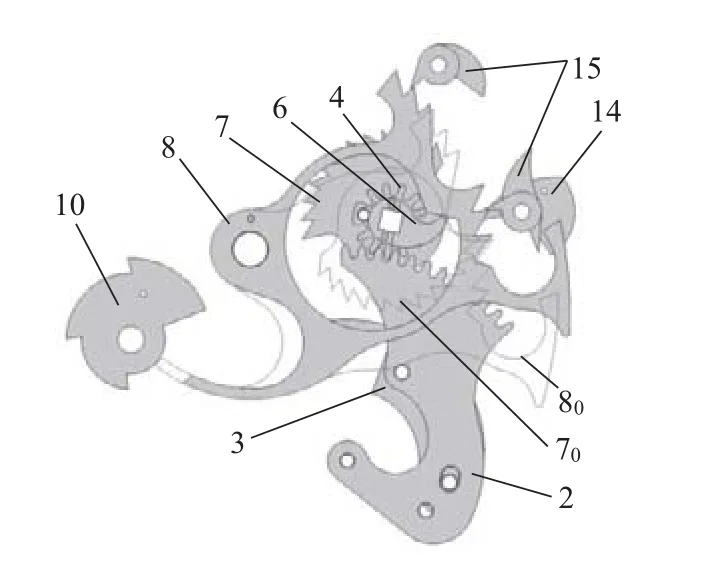
图9 报刻示意图

图10 报刻结束时零件位置
3 凸轮存在的问题
3.1 问刻蜗形凸轮
进行第三刻报刻时,问刻臂B就会在问刻簧9的弹力作用下落在问刻蜗形凸轮10最深的一个台阶——3刻台阶,如图3所示。当进行打簧时,首先进行报时,后进行报刻。报时时,问刻臂B静止不动。报刻时,问刻臂B逐渐远离问刻蜗形凸轮10的中心,直至问刻结束,停止转动。在这个过程中,因为问刻蜗形凸轮10与分轮刚性连接,其转动是连续的,所以,当进行报时和报刻时,问刻蜗形凸轮10的最深侧壁沿顺时针方向逐渐靠近问刻臂B的侧面。而报刻和报时功能的运行需要一定时间,这就会出现以下两种情况。
如果启动打簧功能的时机是在距离整点足够远的时刻,那么,在进行打簧时,问刻蜗形凸轮10的最深侧壁不会与问刻臂B的侧面存在接触。
如果启动打簧功能的时机是距离整点很近的时间,那么,在进行打簧时,问刻蜗形凸轮10的最深(高)侧壁就会挤压问刻臂B的侧面。比如,10点整的前一瞬间——10时59分55秒,打簧功能被启动,问刻臂B落在3刻台阶。假设报时声和报刻声的间隔为均为1秒,那么报时所用时间为10秒,报刻所用时间为4秒,打簧从开始到结束总计需要14秒。再假设,问刻臂B在敲击第二声时脱出问刻蜗形凸轮10,那么问刻臂B脱出问刻蜗形凸轮10总计需要13秒。10时59分55秒,即10时3刻,再经过5秒就到达11时0秒,即11时0刻,如果此时进行打簧,问刻臂B应该落在0刻台阶上。但是此时,问刻臂B还需要8秒才能脱出问刻蜗形凸轮10的最深台阶,问刻蜗形凸轮10就会与问刻臂B进行挤压。为了描述该种情况,图3特意将两个零件放置在一起,实际的问表中是不存在的。
问刻蜗形凸轮10与问刻臂B的挤压,一方面会造成分轮打滑,或者分针停止,或者手表停走,另一方面,打簧功能也可能会停走。正常打簧时,打簧发条的力矩大于问刻簧9弹簧力、音锤弹簧力、打簧传动链与限速机构的摩擦力和相关零件承受的重力的合力。因为问刻蜗形凸轮10与问刻臂B的挤压会产生附加摩擦力,以上合力加上该附加摩擦力的和可能大于打簧发条所提供的力。此时,问刻臂B按压在问刻蜗形凸轮10上,打簧传动链被压紧,导致打簧功能停走,或者直到分轮打滑反向转动,才释放卡死的打簧传动链,使其继续打簧。
最极端的情况为:在12时59分59秒启动打簧功能,问刻蜗形凸轮10在1秒后转到0刻台阶,而问刻臂B脱出问刻蜗形凸轮10总计需要15秒。
以上讨论是在理想状态下进行的,其实在实际加工、使用过程中还会遇到精度的问题,所有的零件均会存在加工误差及随使用产生的磨损,零部件之间的配合精度就会降低。当在某个整时,比如10时0刻,问刻臂B可能掉落到3刻台阶上,产生三次敲击,而不是不产生报刻敲击。相反的,在某个整时前的一小段时间,问刻臂B可能会掉落到0台阶,从而不产生敲击,实际上理应敲击三次。这种情况下的误差值达到3刻。
3.2 问时蜗形凸轮
星形轮11与问时蜗形凸轮12刚性连接,在问刻保险凸轮16(图11所示)的推动力作用下逆时针转动。
由于同样为蜗形凸轮,问时蜗形凸轮12在报时时也会遇到以上相同的问题。如果我们刚好在1时前一瞬间开启打簧功能,那么问时臂3会落在问时蜗形凸轮12最深的一个台阶——12时台阶上,如图4所示。报时的时候,问时蜗形凸轮12在连续的进行逆时针转动,问时臂3也需要运行一定时间才能脱出问时蜗形凸轮12,这就也会出现以下两种情况。
如果启动打簧功能的时机是在距离12时足够远的时刻,那么,在进行打簧时,问时蜗形凸轮12的最深(高)侧壁不会与问时臂3的侧面存在接触。
如果启动打簧功能的时机是距离12时很近的时间,那么,在进行打簧时,问时蜗形凸轮12的最深侧壁就会挤压问时臂3的侧面。问时蜗形轮12被问时臂3卡住。这样问刻蜗形凸轮10因不能推动问时蜗形凸轮12而停止运动,这会造成分轮打滑,或者分针停止,或者手表停走。
同样,在实际加工、使用过程中,所有的零件均会存在加工误差及随使用产生的磨损,零部件之间的配合精度就会降低。不同于问刻蜗形凸轮10,问时蜗形凸轮12需要承受人手的按压力,该力比问刻簧9的力大很多。如果问时臂3落得位置非常接近蜗形凸轮阶梯的边缘,那么问时臂3与问时蜗形凸轮12台阶的接触面积会非常小,该处的应力急剧增大,造成零件的损坏。
精度带来的另一个问题是报时错误。如果问时臂3落得位置非常接近蜗形凸轮阶梯的边缘,它有可能落在该台阶,也有可能掉落到下一台阶。如果在整点的前一瞬间,比如10时59分59秒,打簧功能被启动,那么问时臂3有可能落在10时台阶,也有可能落在11时台阶。这两种情况造成的误差值是很大的。
4 凸轮的设计
4.1 问时蜗形凸轮设计
在讨论问刻蜗形凸轮前先看一下问时蜗形凸轮。
在机械表设计中,为了消除定位间隙和误差,我们常常采用杆簧进行定位。问表的问时蜗形凸轮的定位就采用了该设计。在图1、图11中,星形轮定位簧13压在星形轮11的两个尖齿中间。除了问刻保险凸轮16的拨头160在特定时间的推动作用外,在其他时刻,星形轮11均由星形轮定位簧13限定位置。所以能够确保问时臂3与问时蜗形凸轮12台阶的正确配合。
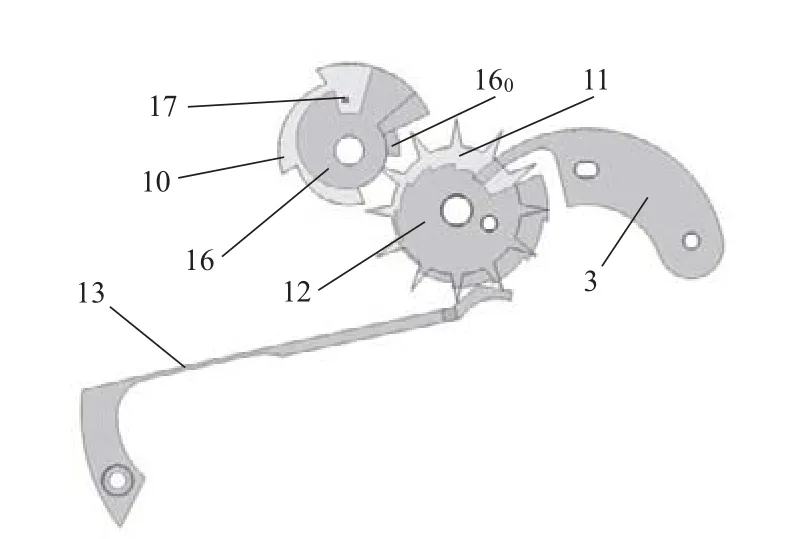
图11 保险结构
如图12所示,星形轮11有12个齿,星形轮定位簧13的拨头的形状为V形。当问刻保险凸轮拨头160推动星形轮11时,星形轮定位簧13拨头的一侧被星形轮11的轮齿抬起一定角度(图12-2),之后达到轮齿最高点(图12-3),紧接着星形轮定位簧13拨头的另一侧迅速推动星形轮齿的另一侧(图12-4),将星形轮11和问时蜗形凸轮12逆时针推动一个角度,到达另一个小时的位置。
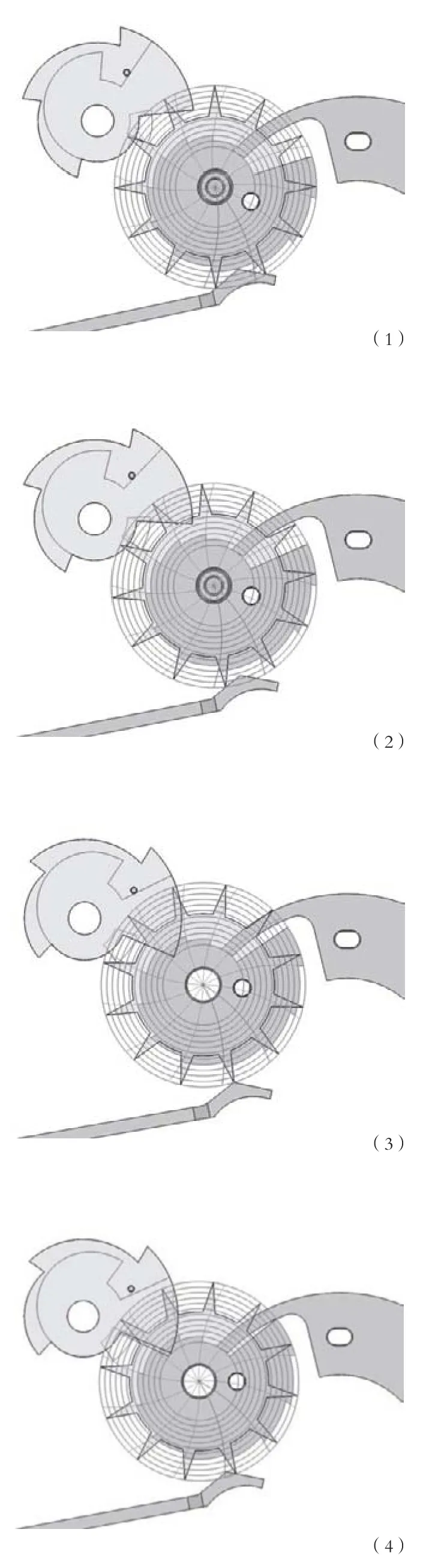
图12 问刻保险凸轮推动星形轮运动过程
因为星形轮定位簧13的拨头的形状为V形,所以问刻保险凸轮拨头160只需转动星形轮11齿槽的半个宽度即可,即星形轮11转动15度(近似15度),就可以把星形轮11和问时蜗形凸轮12推动到下一个小时的位置。在问刻保险凸轮拨头160的推动下,星形轮11和问时蜗形凸轮12的运动是很明确的,即前15度慢慢转动,后15度瞬跳。
前15度的转动会造成问时蜗形凸轮12台阶位置的变化,小时信息的读取可能出现错误。不过,这种可能的错误在结构设计上是可以消除的。
为了消除位置变化带来的读时困难,在整点时,问时臂3的前端应与问时蜗形凸轮12当前时间台阶的前端(或者上一台阶的后端)靠近。如果在问时蜗形凸轮12不被推动的时间启动打簧功能,问时臂3总是停留在当前时间台阶的前端附近,不随时间的变化而变化。当问时蜗形凸轮12被拨头160转动15度时,问时蜗形凸轮12的台阶逆时针转动15度,由于每个台阶的理论总宽度为30度,所以该台阶的后半段还可以与问时臂3接触,并进行正确读时。以图12为例进行说明,图12-1为12时整的零件接触位置——问时臂3的前端与问时蜗形凸轮12的12时台阶的前端靠近,图12-3为问时蜗形凸轮12转过15度时零件的接触位置——问时臂3与12时台阶的后半段接触。
考虑到加工、使用等造成的误差,在整点时,问时臂3的前端与问时蜗形凸轮12当前时间台阶的前端应有一定的间隙,理论上,该间隙可以有蜗轮台阶宽度的一半。具体是多少,每个设计者会有不同,但是总的原则是:问时蜗形凸轮转动15度之后,问时臂3依然可以与该台阶接触,并进行正确报时。
对于问时臂3的宽度,应当确保在问时蜗形凸轮转动15度时,其后端与问时蜗形凸轮12的最深侧壁之间有足够的安全间隙。
以上设计解决了报时时,零件精度造成报时错误和零件损坏的问题,下面,我们讨论另一个问题。
在1时前一瞬间开启打簧功能会遇到下述问题。
由于采用星形轮结构设计,当问刻保险凸轮拨头160推动星形轮11轮齿达到与星形轮定位簧13的拨头最高点接触,并进行后15度的瞬跳时,问时臂3还未脱出问时蜗形凸轮12,而问时蜗形凸轮12在星形轮11的带动下到达了下一小时的位置,问时臂3与问时蜗形凸轮12就进行挤压(图12-4)。
这种挤压是否可以避免?
假设问时臂3的宽度为12时台阶理论总宽度一半,即15度,且问时蜗形凸轮12的最深侧壁被切削掉与问时臂3相应的宽度,即15度,那么进行后15度瞬跳时,两个零件不会存在挤压。但是如果此时直接启动打簧功能,那么我们不能读取正确的时间,甚至可能使另个零件尖角与尖角接触而造成损坏。
其实,基于蜗形凸轮结构,问时臂与问时蜗形凸轮的挤压是不可避免的。
如图12-4,当问时臂3与问时蜗形凸轮12就进行挤压时,由于压
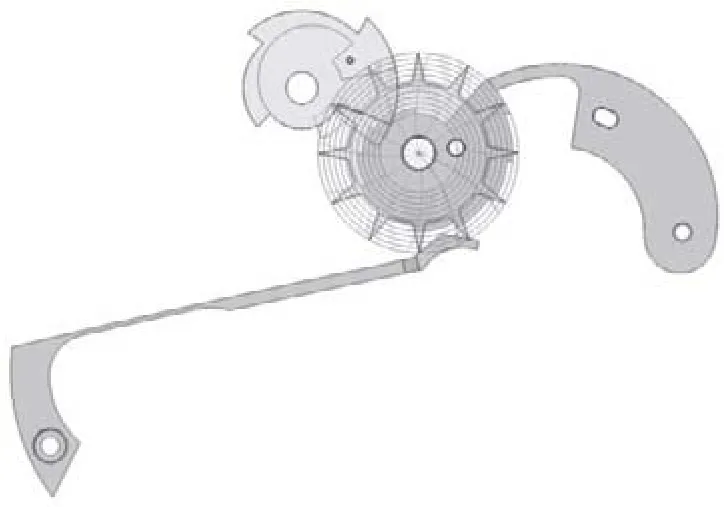
图13 读取1时时零件位置
力只来源于星形轮定位簧13,弹簧力很小,问时臂3可以顺利的脱出问时蜗形凸轮12。脱出之后,在弹簧力作用下,星形轮11和问时蜗形凸轮12继续逆时针转动,到达另一个小时的位置,如图13所示。如果,此时直接启动打簧功能,那么由于问时蜗形凸轮12附加转动了一个角度,问时臂3就会与1时台阶接触,读时正确。
为了确保问时臂3的后端与问时蜗形凸轮12的最深侧壁之间有足够的安全间隙,就需要对问时臂3或问时蜗形凸轮12的1时台阶进行适当切削。不论对哪个零件进行处理,应确保在图12-3所示位置时,两个另加零件存在合适的间隙。
该结构只有当星形轮11和问时蜗形凸轮12逆时针瞬跳的瞬间,问时臂3才有可能出现报时错误的问题,这时,问时臂3既可能落在1时,也可能落在12时。这种情况是不可避免的,但发生的概率是很小的,是可接受的。
4.2 问刻蜗形凸轮设计
和问时蜗形凸轮12一样,问刻蜗形凸轮10也会遇到精度问题带来的报刻错误和零件损坏的问题。对于因零件制造误差和使用磨损造成的精度问题,由于问刻蜗形凸轮10的运动是连续的,问刻臂B落在台阶边缘附近分概率很高,这种问题无法避免,这种情况的误差值为1刻。对于因零件制造误差和使用磨损造成的零件损坏问题,由于问刻齿条8受到问刻簧9的弹力比较小,其压在问刻蜗形凸轮10上的力就比较小,不会使两个零件产生严重的损坏。
对于挤压问题,解决方案来自于上述介绍的星形轮结构。我们之前只讨论了问时蜗形凸轮设计问题,接下来介绍问刻蜗形凸轮设计。
讨论问时蜗形凸轮结构设计时,我们没有具体说明问刻保险凸轮16的运动形式,现在详细介绍。
图11中,问刻保险凸轮16置于问刻蜗形凸轮10下方,并在共同转轴上自由转动。问刻保险凸轮16的最高台阶与问刻蜗形凸轮10的0刻台阶等高,其他台阶隐藏于问刻蜗形凸轮10下方。问刻保险凸轮16拥有一个槽口,允许问刻蜗形凸轮10上的销17在其中运动,并由槽口的两个侧边限定运动位置。因为问刻蜗形凸轮10是主动件,问刻保险凸轮16是从动件,所以当问刻蜗形凸轮10推动问刻保险凸轮16的槽口时,问刻保险凸轮16转动,其他时刻问刻保险凸轮16的位置是不确定的。
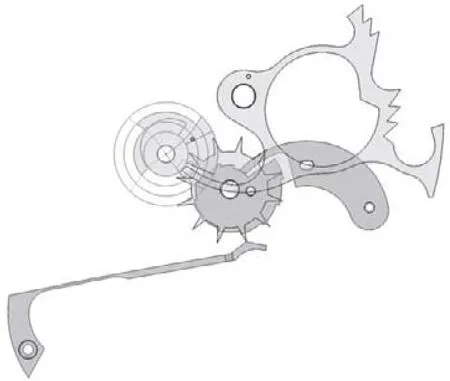
图14 整时前一瞬间的时间读取情况
在整时前的一段时间,销17推动问刻保险凸轮16的槽口侧边,使拨头160推动星形轮11转动,如图12所示。如果在整时前的一瞬间启动打簧功能,那么问刻齿条8应该落在3刻台阶上。为了使问刻齿条8顺利的与3刻台阶接触,0刻台阶被切削掉一部分,那么3刻台阶就会增大相应的角度,如图14所示。在被销17推动时,问刻保险凸轮16的最高台阶侧壁一般与切削后的0刻台阶侧壁对齐,且问刻齿条8与问刻蜗形凸轮10的最深侧壁之间设计有充足的间隙,一方面是避免因精度问题造成的报刻错误,另一方面是为问刻蜗形凸轮10的持续转动提供空间。
当达到整时的一瞬间,星形轮11在弹簧压力下进行瞬跳,因为拨头160有一定的宽度,星形轮11的轮齿就会推动拨头160的后侧,如图12-4所示。又因为问刻保险凸轮16存在槽口,并可在其转轴上自由转动,在星形轮11的推力作用下,问刻保险凸轮16顺时针转动,其最高台阶填充问刻蜗形凸轮0刻台阶被切削掉位置。根据问刻臂B和问时臂3的挤压情况,这时存在以下两种情况:
1.如果星形轮11瞬跳时推动问时蜗形凸轮12先与问时臂3进行挤压,星形轮11只是瞬跳了一定角度,还未达到最终位置,问刻保险凸轮16的拨头160不被星形轮挤压在问刻臂B上,此时问刻臂B不承受挤压力。当报时完毕,问时蜗形凸轮12与问时臂3脱离后,星形轮11在弹簧力作用下继续转动一定角度,依然未达到最终位置,此时问刻保险凸轮16的拨头160被星形轮11挤压在问刻臂B上,因为星形轮定位簧13的力比问刻簧9的力小很多,问刻臂B可以顺利的脱出问刻蜗形凸轮10,并进行正确的报刻。当报刻完毕后,星形轮11在其定位簧的作用下转动到下一小时的位置。
2.如果星形轮11瞬跳时推动问刻保险凸轮16的拨头160先与问刻臂B进行挤压,星形轮11只是瞬跳了一定角度,还未达到最终位置,问时蜗形凸轮12不与问时臂3进行挤压,报时功能正常。报时完毕后,因为星形轮定位簧13的力比问刻簧9的力小很多,问刻臂B可以顺利的脱出问刻蜗形凸轮10,并进行正确的报刻。当报刻完毕后,星形轮11在其定位簧的作用下转动到下一小时的位置。
其中,第二种情况运动过程简单,稳定性好。同时挤压的零件少,磨损等问题也部分避免。
如果上述时间打簧之后,马上启动打簧功能,读时的情况我们之前已经讨论过,读刻会不会出现问题?
和报时原理一样,星形轮11瞬跳结束后进行报刻时,问刻蜗形凸轮10静止不动(假设瞬跳时间极短),问刻保险凸轮16顺时针转动,其最高台阶已经填充问刻蜗形凸轮0刻台阶被切削掉位置,并与问刻蜗形凸轮0刻台阶组成一个完整的0刻台阶,问刻臂B就会与问刻保险凸轮16的台阶接触,读刻正确。
在此后一定时间内,问刻保险凸轮16的槽口与销17的相对位置是任意的,不过由于行星轮11轮齿的限位作用,不论问刻保险凸轮16在何位置,其总是与问刻蜗形凸轮0刻台阶组成一个完整的0刻台阶。并且,随着问刻蜗形凸轮10的顺时针转动,问刻臂B可以直接与问刻蜗形凸轮10接触,此时,不论问刻保险凸轮16在任何位置,都不会造成报刻错误。
5 结论
问表属于微型精密机械,又具有很强的逻辑性,本文对问时、问刻凸轮结构设计中精度问题及逻辑问题进行了讨论,希望对大家有一定的启示。由于作者水平有限,文中难免有不足之处,希望广大钟表爱好者和从业者批评指正。
猜你喜欢
传染病信息(2022年2期)2022-07-15 08:55:02
水运工程(2020年2期)2020-02-26 06:28:38
数学物理学报(2019年3期)2019-07-23 01:15:36
物流技术与应用(2019年6期)2019-07-16 08:14:52
小天使·一年级语数英综合(2019年2期)2019-01-10 11:57:30
喜剧世界(2017年10期)2017-12-05 20:11:40
水利科技与经济(2016年7期)2016-04-25 13:03:04
重型机械(2016年1期)2016-03-01 03:42:07
东北师大学报(自然科学版)(2014年1期)2014-02-27 08:02:07
东北石油大学学报(2013年6期)2013-03-11 15:35:37
