
用于人体姿态估计传感的菲涅尔透镜设计
2020-06-16 01:41何烨林
应用光学 2020年3期
何烨林,张 军
(暨南大学 理工学院 广州市可见光通信重点实验室,广东 广州 510632)
引言
人体姿态估计热释电红外传感系统是一种能检测人体发出的红外线而输出电信号的传感系统,因其功耗低、成本低以及灵敏度高等优点被广泛应用于人体特征识别、方位检测等领域。其原理是人体运动形态与人体红外辐射能量变化间存在一定的对应关系,通过对红外传感器输出电信号进行分析,就能提取出人体运动的相关特征信息,从而实现对不同人、不同运动状态的识别,为人体身份识别和人体姿态估计提供了一种低成本的解决方案[1-5]。清华大学的杨靖等人采用半球形、半柱形等菲涅尔透镜搭建了热释电红外人体动作形态检测实验系统,实现对人体踏步、跳跃、摆臂等动作进行了区分[6]。中北大学的冯恒振等人通过对信号进行时域和频域分析,实现了踏步过程中跳跃动作的提取[7]。Xiaomu Luo 等人通过增加PIR(passive infrared detectors)传感器数目提高了室内人体跟踪及活动状态识别的准确率[8-11]。但是目前该领域国内外研究多集中在算法层面,热释电红外人体动作传感系统所采用的菲涅尔透镜均是市面上易于购得的半球形或半柱形菲涅尔透镜,并未针对人体形态和具体使用场景进行专门的菲涅尔透镜设计,因而降低了系统测量精度。
随着体感游戏(一种通过肢体动作变化来进行操作的电子游戏)和虚拟现实的兴起,如何快速准确地检测出人体四肢运动信息成为研究热点,但目前市面上的菲涅尔透镜由于其检测区域的限制,很难有效地提取人体四肢信息。为了实现在复杂场景下对人体姿态快速、低成本地检测,对利用热释电红外传感器进行人体姿态检测的方法进行了研究,通过改变菲涅尔透镜阵列的结构以适应人体体型,提出一种针对人体运动姿态检测场景的阵列菲涅尔透镜光学系统设计方法,从而提高系统的测量精度。
1 基本原理及设计
1.1 基于热释电红外传感器的人体姿态估计系统
大部分PIR 系统原理如图1 所示。外界的红外光线入射到菲涅尔透镜阵列后被折射,折射光汇聚到光电探测器上获取光电信号。菲涅尔透镜阵列的主要作用有两点:一是将空间划分为若干明暗相间的探测区域,二是增大探测器的探测距离,可以将感应距离从1 m~2 m 增加到8 m 左右。当目标体行经探测区域时探测器将会产生电信号,通过对电信号进行分析,从而提取有价值的运动信息。
1.2 人体四肢姿态检测的菲涅尔透镜总体布局

图 1 热释电红外探测器系统示意图Fig. 1 Schematic diagram of pyroelectric infrared detector system
传统的菲涅尔透镜没有针对人体不同部位进行处理,透镜的区段将探测空间均匀分隔为敏感区和非敏感区,当人体在探测区域内运动时,肢体交替剪切敏感区和非敏感区,热释电探测器接收到的红外辐射能量发生变化,并转换为相应的模拟电压信号。为了提高菲涅尔透镜的聚光能力以及获取更多的人体四肢运动信息,新结构针对人体形态进行设计,各个菲涅尔微结构分别收集人体不同部位的红外光并汇聚到对应的探测器上,从而提高系统对不同人体姿态的分辨能力。设计的基于热释电红外传感器的人体姿态估计系统新结构如图2 所示。人体不同部位发出的红外光经过菲涅尔透镜阵列后分别汇聚到6 个探测器上。当人体在探测器的敏感区域内运动时,热释电探测器将输出连续的时域信号,这种模拟信号中包含有与人体运动形态有关的特征信息。通过比对6 个探测器上的信号有无以及强弱变化,利用主成分分析、随机森林等统计学习方法[5],对模拟信号中的一些时、频域信息进行处理后,实现对人体姿态的判别估计,如当人体双臂平展开时,两侧的热释电探测器将有信号激发,当双臂下垂时,两侧探测器信号将减弱。
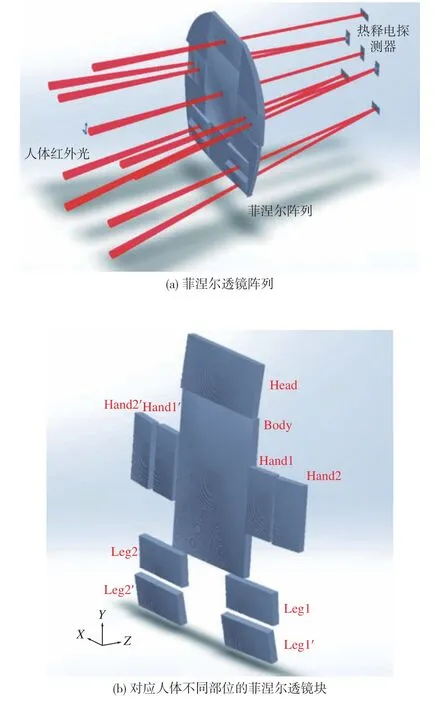
图 2 基于新型菲涅尔透镜的热释电红外探测器系统Fig. 2 Schematic diagram of pyroelectric infrared detector system based on new Fresnel lens
图2 中设计的新型菲涅尔透镜阵列划分对应人体各部位的探测区域,设计目的是使探测明区尽量拟合并覆盖人体的四肢以及躯干,每个菲涅尔透镜块负责采集人体不同部位的红外光,并据此功能对透镜块命名(头部Head、手部Hand、腿部Leg 和躯干Body),以方便描述。
1.3 菲涅尔微结构透镜阵列构建方法
菲涅尔透镜是球面透镜取掉尽可能多的光学材料,而保留表面的弯曲度,使透镜连续表面部分“坍陷”到一个平面上,在实现球面透镜的光线偏转与汇聚功能的同时,菲涅尔透镜厚度远小于球面透镜,从而大大降低光学系统尺寸。因此设计时,首先将球面镜设计成非球面面形以达到所要求的光束汇聚效果,然后将非球面面形保留并转化为菲涅尔微结构,从而形成菲涅尔微结构透镜。
在z 轴方向上,以Δh 高度等高地对非球面进行分割,并转移至同一基面,即可构成菲涅尔透镜微结构。其xz 面的截面图如图3 所示。
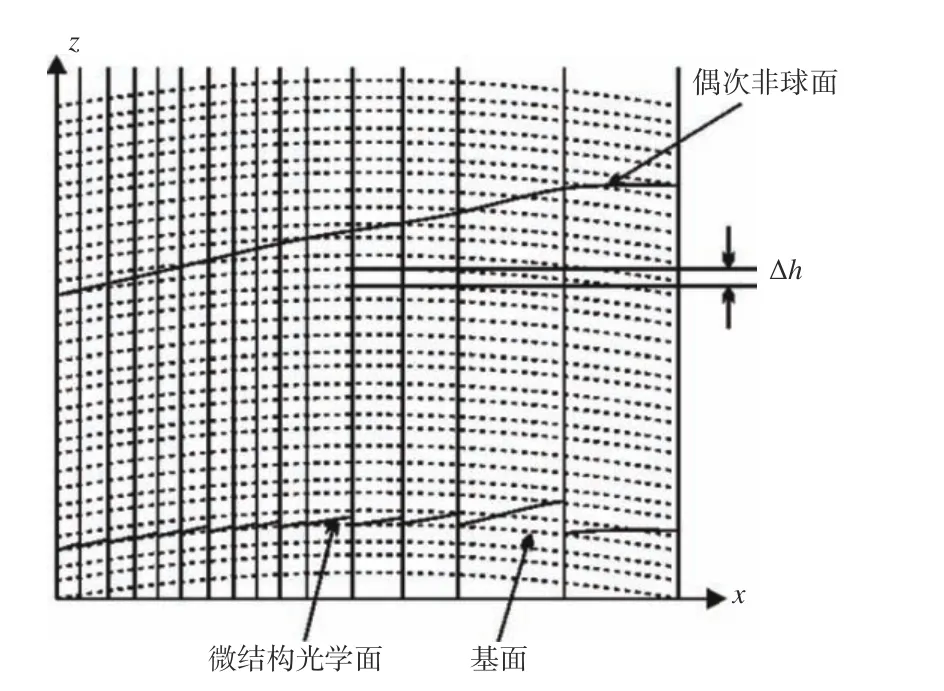
图 3 菲涅尔微结构xz 面的截面图Fig. 3 Cross section diagram of Fresnel misrostructure on xz plane
考虑到系统的实际需求以及加工、检测的可能性,在Zemax 设计软件中常用锥形偶次非球面模型来描述非球面面形。该模型使用基本的曲率半径和圆锥曲面,其表面矢高由下式描述[12-14]:

式中:z 为非球面矢高;c 是表面中心处的曲率;r 是径向高度; αi是非球面系数;k 是二次曲面系数,k <−1时 为双曲面, k=−1时 为抛物面, −1 <k <0时为椭圆, k=0 时为球面, k >1时为扁椭圆。
2 仿真设计
利用Zemax 非序列模式下的放射状对称菲涅尔透镜进行仿真设计,其放射状小平面构成的面形端点垂度表达式和偶次非球面相同,由公式(1)定义。
要生成一个菲涅尔透镜,每一个小平面沿着z 轴有一个恰当的偏移,所有的小平面均起始于有相同z 坐标的中心顶点,这样就使得生成的透镜有相关的最小体积。Zemax 非序列模式下使用放射高、X 半宽、深度/频率、倾斜度、厚度、基本曲率半径、二次曲线常数、偶次半径r 幂的系数等参数生成菲涅尔小平面。因为菲涅尔透镜对象是一个封闭的整体,因此它可以反射、折射和吸收光线。
为降低加工难度和成本,设计的非球面透镜一个表面为非球面,另一个表面为平面。选用常见的PMMA 作为透镜材料,其折射率为Nd=1.491 756,阿贝数为Vd=57.440 8。设计中的探测器采用德国海曼公司的LHI968,它的敏感元面积为2×1 mm2,对强烈的白光以及电磁辐射具有优异的抗干扰性能,能满足设计要求。由于人体辐射的远红外线波长在9.6 μm 附近,仿真输入光也采用这一波长。
根据公式(1)计算得到菲涅尔微结构各入射面的偶次非球面系数,如表1 所示。菲涅尔透镜块、探测器的尺寸和倾斜角度如表2 所示。
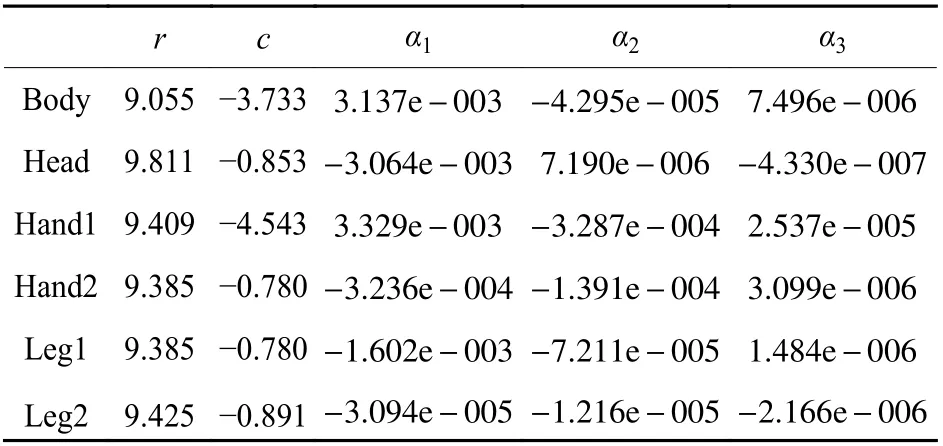
表 1 菲涅尔微结构主要设计参数Table 1 Main design parameters of Fresnel microstructure
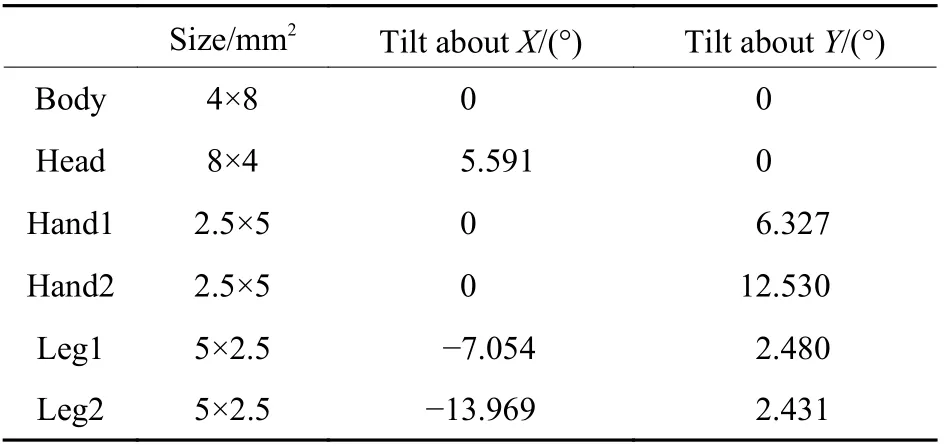
表 2 菲涅尔微结构主要尺寸Table 2 Main dimensions of Fresnel microstructure
3 结果与分析
利用Zemax 软件对仿真的菲涅尔阵列光学系统进行光线追迹,设定菲涅尔透镜阵列距离人体4 m,距离地面1.2 m,人体尺寸为标准成人尺寸,身高为1.7 m,设置人体头部、手部、腿部以及躯干辐射功率分别为1.5 W,2 W,2.5 W 和25 W[15]。图4是新型菲涅尔透镜和传统菲涅尔透镜对空间分隔为明暗区的示意图。图4 中以±1°视场角正对菲涅尔透镜块入射的区域视为明区,即图中的红色圆环。通过定制化的透镜形状设计,新型菲涅尔透镜增强了系统对人体不同姿态的识别和检测能力。
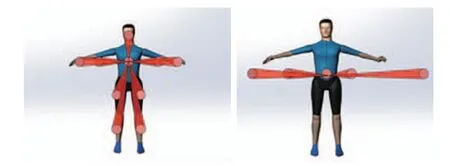
图 4 新型菲涅尔透镜阵列(左)和传统菲涅尔透镜阵列(右)分区示意图Fig. 4 Divisional schematic diagram of new Fresnel lens array (left) and traditional Fresnel lens array(right)
由于透镜距离人体较远,镜片受到红外探头视场角度的制约,垂直和水平感应角度有限,镜片面积也有限,红外光到达透镜前时近似于平行光[6],人体发出的红外线光束,经过菲涅尔微结构耦合后经一定距离的自由空间传输,光线汇聚到探测器上。当人体平展双臂站立时,在不考虑材料吸收的前提下,仿真得到6 个探测器上的光斑图如图5 所示,通过光线追迹,采用下式计算光能利用率:

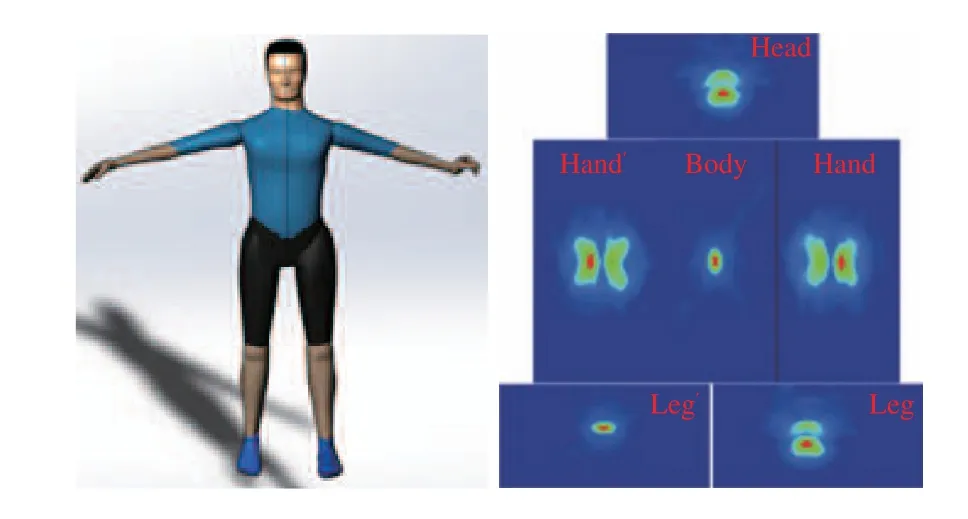
图 5 人体平展双臂站立时探测器光斑图Fig. 5 Spot diagram of detector when both arms flatting
式中: Nhit表示击中探测器的光线数目; Nall表示入射到菲涅尔透镜的光线总数。各探测器光能利用率分别为96.70%、94.8%、96.95%、97.75%、90.65%和90.15%,即入射红外光除一部分以杂散光形式被损耗外,大部分光线正确地汇聚到了探测器上。由于LHI968 探测器的电压响应度达到3 300 V/W~3 800 V/W,因此可以满足对人体不同部位红外光的响应。当人体垂下一臂站立时,仿真得到6 个探测器上的光斑图如图6 所示,对应其中一臂的探测器没有响应。以上结果说明本设计可有效增强系统对人体不同姿态的识别和检测能力。
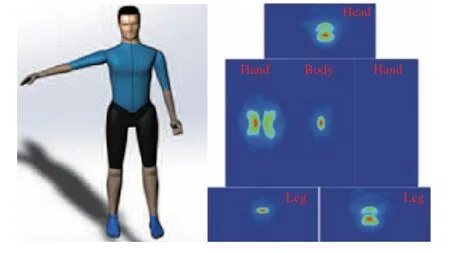
图 6 人体单臂垂下时探测器光斑图Fig. 6 Spot diagram of detector when one arm hanging down
关于能量损耗,在不考虑材料吸收的前提下,能量损耗主要是入射光经过微结构时发生偏折造成的。图7 是微结构的局部放大。从图7 中可以看出,入射光束1 被菲涅尔微结构光学面折射后,正常出射并耦合到探测器上;入射光束2 被菲涅尔微结构光学面折射后,在非光学面上发生偏折,没有按照光束1 的折射光线方向传输,而是改变了光线传播路径,因而不能正确地耦合入探测器中,从而造成了能量损耗。
4 结论
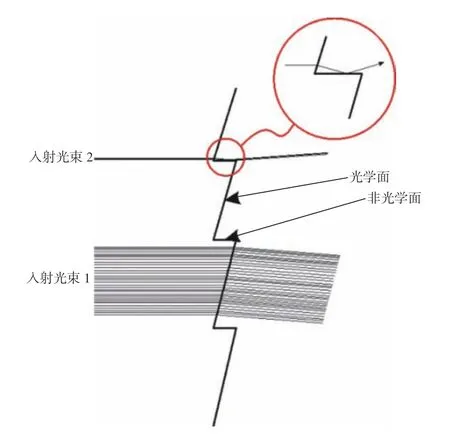
图 7 菲涅尔微结构透镜局部放大图Fig. 7 Partial enlarged drawing of Fresnel microstructure lens
根据人体形态设计了一种用于热释电红外人体姿态估计传感装置的菲涅尔透镜阵列,根据偶次非球面描述公式计算了菲涅尔透镜微结构的设计参数。新结构的菲涅尔透镜阵列整体尺寸为28 mm×32 mm,前表面曲率半径为43.7 mm,后表面曲率半径为45.2 mm,中心厚度为0.6 mm,材料选用PMMA。通过仿真结果可知,新结构较传统装置能够获取更多的人体红外信息和姿态信息;人体不同部位所对应探测器信号能够反映人体不同姿态,可以满足对人体不同部位红外光的响应,进而实现人体姿态的准确估计。与传统的菲涅尔透镜结构相比,新型结构的菲涅尔透镜设计对人体的自然形态更加具体,在提高人体姿态估计准确度方面具备明显优势。
但目前设计仍存在一定适用范围,本次菲涅尔透镜阵列的设计设定为距离人体4 m,距离地面1.2 m,人体身高为1.7 m,对应手部的明区距离地面也为1.2 m,当人体手臂在运动过程中不能切割对应明区时,系统对手部信息的判别将失效,其他人体部位同理。因此当被测人体尺寸与设计人体尺寸差异较大时,需要调整各个微透镜的角度以进行适应。
猜你喜欢
红外技术(2022年11期)2022-11-25
中国典型病例大全(2022年7期)2022-04-22
纺织科学研究(2021年1期)2021-03-19
家庭影院技术(2020年2期)2020-03-25
三联生活周刊(2017年37期)2017-09-11
中国惯性技术学报(2017年1期)2017-06-09
青年时代(2017年4期)2017-03-10
航天制造技术(2016年6期)2016-05-09
云南师范大学学报(自然科学版)(2015年5期)2015-12-26
中国塑料(2015年9期)2015-10-14
