42m拖网渔船水动力性能分析
2020-06-15 09:53:54中国水产科学研究院渔业工程研究所李梦阳段若衡
机械工业标准化与质量 2020年5期
中国水产科学研究院渔业工程研究所□李梦阳 段若衡
中国是渔业大国,2018年年末渔船总数为86.39万艘,总吨位1080.15万吨,全社会渔业产值12815.41亿元。中国渔业船舶技术更新发展日新月异,但与世界发达国家相比,仍存在一定差距,渔船技术水平低、普遍船龄高、安全隐患大为主要问题。以浙江嵊泗渔港为例,该渔港海况恶劣、台风频发。近年来,由台风天气引发的港内渔船沉船碰撞事故给渔民造成了严重的经济损失。根据近十年来浙江省重大渔业海难事故案例统计分析,恶劣天气海况造成重大渔业海难事故占全部重大渔业海难事故的80%以上,且呈上升趋势。通过实地调研可知,当台风天气来临时,大部分渔船会停泊在港池内躲避灾害。小型渔船以多艘并排的形式靠在岸边,而大中型渔船需要在港池水深位置锚泊避风。恶劣海况会造成渔船起锚或者锚链断裂等风险,基于此,港内渔船锚泊系统的设计对于渔船在台风天气是否能够保证稳性和安全性尤为重要,良好的系泊系统可以保证船舶在次台风时的定位需求,并在可预见的恶劣海况下也可以生存。而船体水动力性能频域计算更是锚泊系统设计的基础,因此对典型渔船船型进行水动力性能分析,对到港渔船更好地避风减灾、保障渔业生产安全具有重要的实际意义。同时,拖网渔船作为捕捞业最常见的渔船之一,研究其水动力性能对改善渔船船型,有效提高船舶稳性具有一定的现实意义,可为渔船的效率性和经济性发展提供理论依据。目前,针对拖网渔船的水动力特性研究大多关注渔船的阻力性能,基于Computational Fluid Dynamics计算软件 (简称CFD)对其水动力节能技术进行优化分析。谢永和等以42m拖网渔船为研究对象,从船型优化等角度来对拖网渔船的水动力节能技术进行分析阐述并进行优化后船模的阻力预报与对比。王立军等对42m级拖网渔船在拖网作业时的水动力性能进行了研究,通过船模水池试验和CFD数值模拟计算相结合,研究拖网渔船在考虑渔具影响下不同工况时的水动力性能。
从改善船体稳性角度出发,选取嵊泗海域渔民广泛使用的典型42m拖网渔船 (浙嵊渔07211号)进行研究,根据其型线图,利用AQWA软件建立有限元网格模型,基于势流理论, 选取 0°、 45°、 90°、 135°和 180°共五个方向的浪向角,对该渔船在满载返航的作业工况下进行了频域水动力性能分析,得到其在六个自由度上的运动响应RAO,附加质量和辐射阻尼、一阶波浪扰动力和二阶波漂力等数据。
1 船体水动力基本理论
(1)船体水动力计算数学模型
为了更好的研究无航速状态下船舶与海洋结构物在波浪中的运动,采用固定坐标系o0x0y0z0和随体坐标系oxyz两个坐标系统,如图1所示。
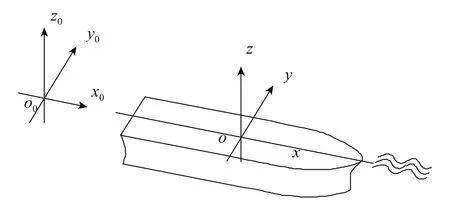
图1 固定坐标系与随体坐标系定义
固定坐标系o0x0y0z0作为参考坐标系在流场中固定,o0x0y0平面定义为水线面,o0y0垂直于该平面的o0z0轴铅直向上。随体坐标系oxyz原点o与结构物重心位置重合,固连在结构物上,并随着浮体做摇荡运动。随体坐标系oxyz与固定坐标系o0x0y0z0中的相对位置变化表征了浮体的运动姿态。随体坐标系原点o的位置为 (x,y,z),该坐标为相对于固定坐标系的线位移,把沿x、y与z方向的平动定义为纵荡、横荡以及垂荡;把浮体沿x、y与z方向的转动变化定义为浮体的横摇、纵摇和艏摇运动。其示意图如图2所示。
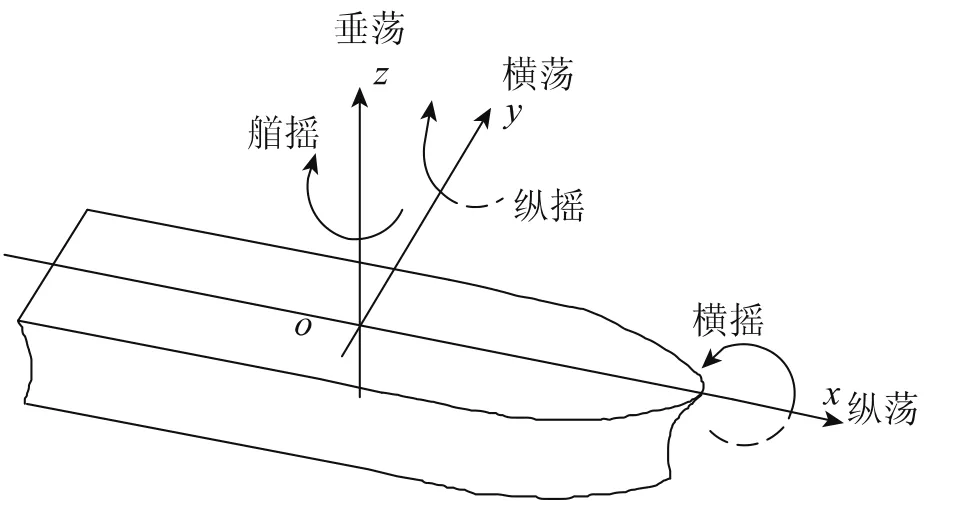
图2 六自由度的运动示意图
(2)浮体的频域计算方法
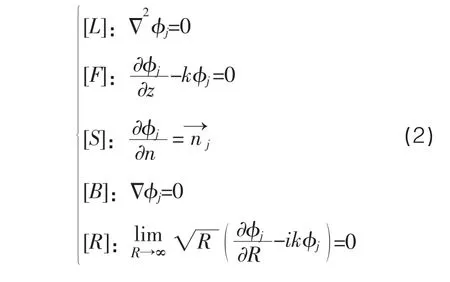
浮体频域计算分析时,流场中总的速度势φ (x, y, z) 包括:入射势 φ0(x,y, z)、 浮体六自由度运动产生的辐射势φj(x,y,z) (j=1, 2,…, 6)以及绕射势 φ7(x, y, z)。然而在实际情况中,波浪入射势φ0(x,y,z)是已知的,所以求解辐射势φj(x,y,z) (j=1,2,…,6)和绕射势 φ7(x,y,z)是求解总速度势φ (x, y, z) 的核心。

辐射势φj(x,y,z)满足的控制方程和定解条件为:
绕射势φ7(x,y,z)求解的控制方程和定解条件为:
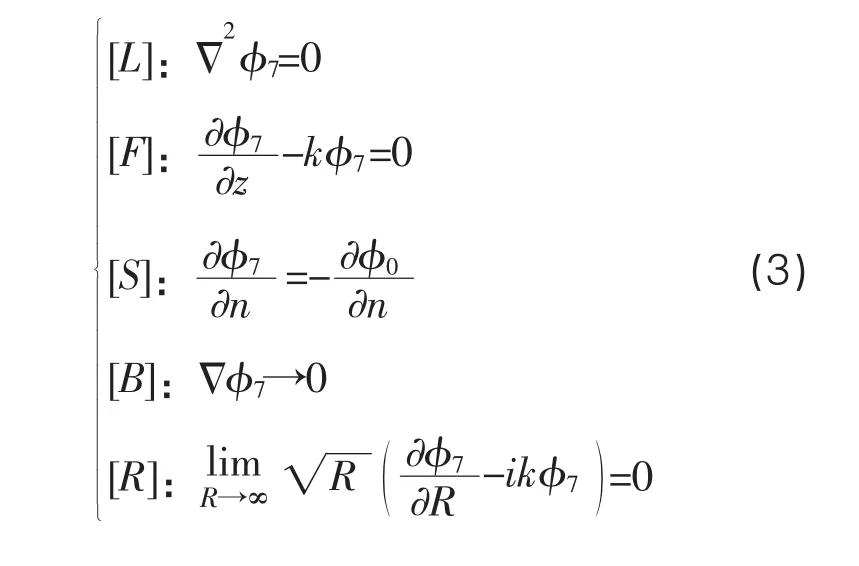
已知入射势φ0(x,y,z)的条件下,通过求解上式就可得到辐射势φj(x,y,z)和绕射势φ7(x,y,z),进而得到流场中总的速度势φ (x, y, z)。
2 水动力模型的建立
选用浙江省嵊泗县海洋与渔业局提供的浙嵊渔07211号船型。船体主要参数为:总长42.8m,垂线间长36m,设计吃水2.8m,型宽7m,型深3.5m,设计排水量420.1吨。
根据CAD型线图提供的尺寸,截取船体水下型体部分的型值点,并导入AQWA生成模型。船体水下部分的模型以及网格划分如图3所示。
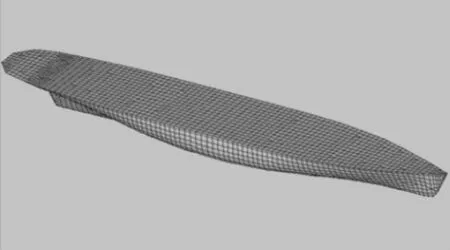
图3 船体的水动力计算模型
设惯性坐标系OXYZ,坐标原点位于尾舵与基线交点处,X轴指向船艏,Y轴指向左舷,Z轴按照右手规则指向上。本文以渔船满载返航的载况为计算工况,此时船体的重心坐标为(16.384,0,2.5)。本文研究方法上的创新点在于采用水动力计算软件AQWA,分析了42m渔船在极限恶劣生存工况下规则波取不同入射角时的水动力性能。
3 水动力参数计算结果分析
(1) 概述
船体在规则波中六个自由度的运动可以分解为三个线位移和三个角位移,其中三个线位移分别为纵荡、横荡和垂荡,三个角位移分别为横摇、纵摇和艏摇。由于船体左右对称,所以在对船体进行频域分析时选取0°、45°、90°、135°和180°共五个方向的浪向角。取港口系泊锚地的水深为5m,海洋环境的海水密度为1025kg/m3。频域分析时,规则波的波浪频率取0.1~3.5rad/s,步长为0.1rad/s,在频域内对船体进行水动力性能分析,得到船体的运动响应RAO,附加质量和辐射阻尼等。
(2)幅值响应算子 (RAO)计算结果分析
图4中,①号曲线为0°入射角,②号曲线为45°入射角,③号曲线为90°入射角,④号曲线为135°入射角,⑤号曲线为180°入射角。由图4所示,纵荡和横荡响应曲线不仅形状较为相似并且数值也相差不大,其大小均随着波浪圆频率的增大而不断衰减。当波浪圆频率较小时,船体在纵荡和横荡方向上的运动响应较大,并且在波浪圆频率为1.6rad/s附近逐渐趋于0。此外,波浪的浪向角也对运动响应有所影响。
根据纵荡的运动响应曲线可知,当波浪的浪向角为0°和180°时,纵荡的运动响应最大,其次是45°和135°,而90°的浪向角对纵荡的运动相应影响最小。而横荡的情况刚好相反,计算结果与实际情况相符。根据垂荡的运动响应曲线可知, 当浪向角为 0°、 45°、 135°和 180°时, 随着波浪圆频率的增大,垂荡运动响应均先减小再增大最后再减小。当浪向角为90°时,垂荡运动响应在低频情况下的运动较为剧烈,直到波浪圆频率为1.2rad/s时垂荡运动响应才开始衰减。
从横摇响应曲线可以看出,船体在90°浪向下的横摇运动响应最大。当浪向角为90°时,随着波浪圆频率的增大,船体的横摇运动响应先增大后减小,并且在波浪圆频率为0.8rad/s时达到峰值4.87°/m。当浪向角为45°和135°时,船体的横摇运动响应在0.7rad/s左右达到峰值2.51°/m。当浪向角为0°和180°时,船体的横摇运动响应最小。
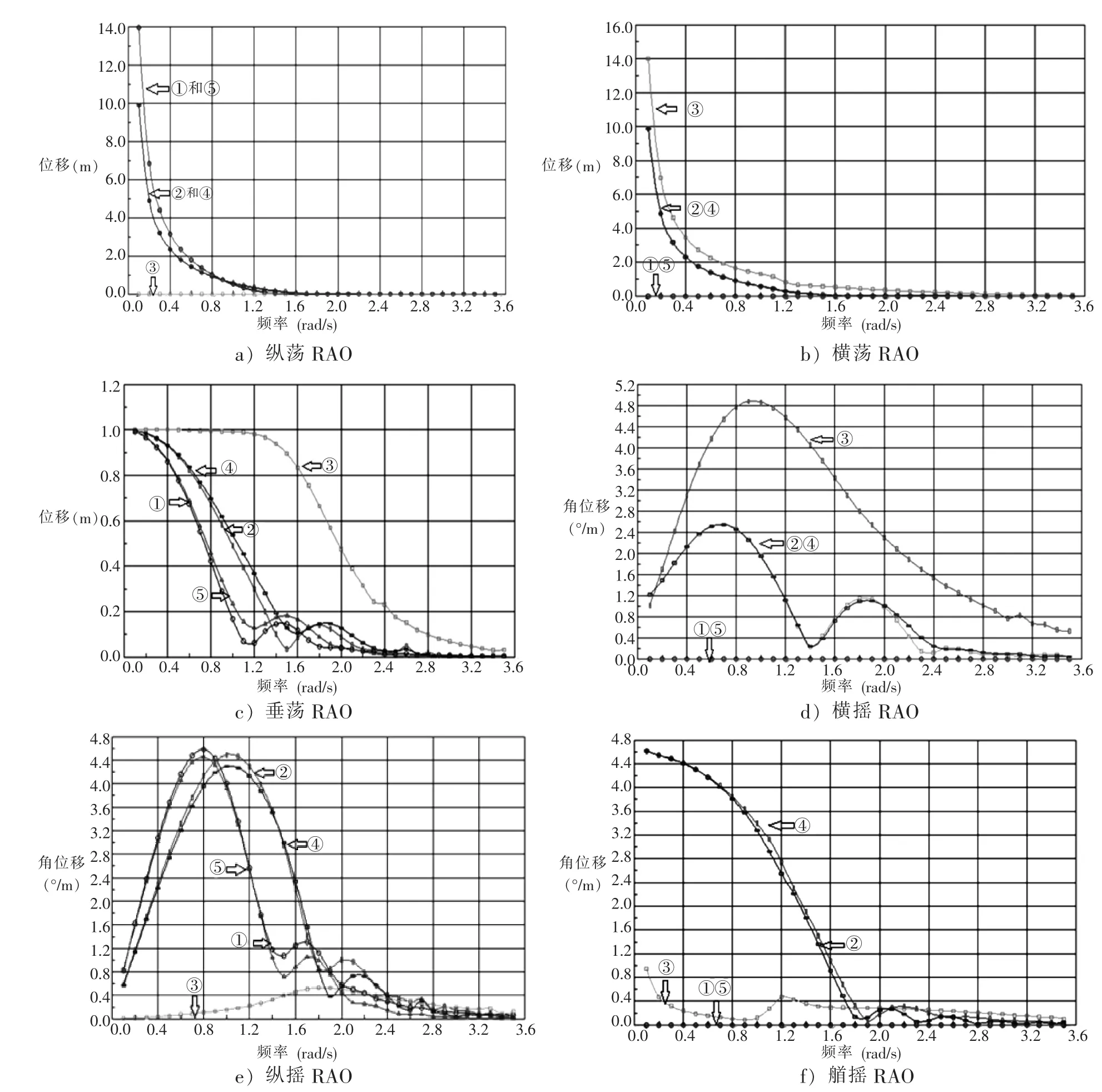
图4 船体六自由度运动相应RAO
对于船体的纵摇响应曲线,当浪向角为0°、45°、135°和180°时,其纵摇运动响应均先增大后减小。当浪向角为0°和180°时,纵摇响应在波浪圆频率为0.8rad/s时达到峰值,峰值为4.45°/m。当浪向角为45°和135°时,船体的纵摇运动响应在1.0rad/s时达到峰值,峰值为4.29°/m。船体在浪向角为90°时的纵摇运动响应最小,此计算结果与实际情况相符。
根据船体的艏摇运动响应曲线,船体的艏摇运动响应总体随着波浪圆频率的增大而减小。其中船体在浪向角在45°和135°时艏摇运动较为剧烈。对于船体而言,主要考虑其横摇运动的影响。根据上述结论,在浪向90°、波浪圆频率0.8rad/s时,船体的横摇最为剧烈。
(3)附加质量和辐射阻尼计算结果分析
船体在波浪载荷的作用下会产生六个自由度的运动,运动会激发出一个散射速度势,这个散射速度势会改变流体速度场的分布,从而使船体本身收到一个附加的水动力载荷。而该载荷与船体运动的速度和加速度成正比,故以附加质量和附加阻尼的形式体现。计算结果如图5与图6所示。
图5、图6中①号曲线为纵荡,②号曲线为横荡,③号曲线为垂荡,④号曲线为纵摇,⑤号曲线为横摇,⑥号曲线为艏摇。由图5可知,船体的附加质量总体随波浪圆频率的增大而减小。船体纵荡、横荡和垂荡三个自由度上的附加质量要小于在横摇、纵摇和艏摇方向上的附加质量。船体在垂荡、横荡和纵摇方向上附加质量的变化趋势较大,并且垂荡方向产生的附加质量最大。这是由于船舶垂向的水线面面积最大,横剖面面积最小,因此附加质量跟船舶尺寸有很大关系。由图6可知六个自由度方向的辐射阻尼均随着波浪圆频率的增大总体呈现先增大后减小的趋势。其中,垂荡方向的辐射阻尼要比纵荡和横荡的辐射阻尼更大,纵摇方向的辐射阻尼要大于横摇和艏摇方向的辐射阻尼。由图5和图6可以看出,随着船体运动频率增大,其附加质量趋于稳定,而辐射阻尼产生了剧烈的变化。船体的附加质量和辐射阻尼对船体运动频率具有较大的依赖性。
(4)一阶波浪绕动力计算结果分析
在AQWA-LINE水动力计算的输出结果中,波浪激励力以如下几项来表示:弗劳德克-雷洛夫力/力矩、绕射力/力矩、总的波浪力/力矩。如图7表示弗劳德克-雷洛夫力/力矩和绕射力/力矩。
图7中,①号曲线为0°入射角,②号曲线为45°入射角,③号曲线为90°入射角,④号曲线为135°入射角,⑤号曲线为180°入射角。由图7可知,无论波浪入射角是多少,一阶波浪激励力都有随频率的增大而减小的趋势。在纵荡和纵摇两个自由度上,90°浪向角时船体所受的波浪激励力最小,并且在频域内比较稳定,而其他浪向角下船体所受的波浪激励力都有较大的波动。在横荡、垂荡和横摇三个自由度上,船体所受的波浪激励力在浪向角为90°时最大,在浪向角为0°时,横荡和横摇自由度上的波浪激励力很小。艏摇的波浪激励力在斜浪时达到最大,横浪和迎浪下都比较小。
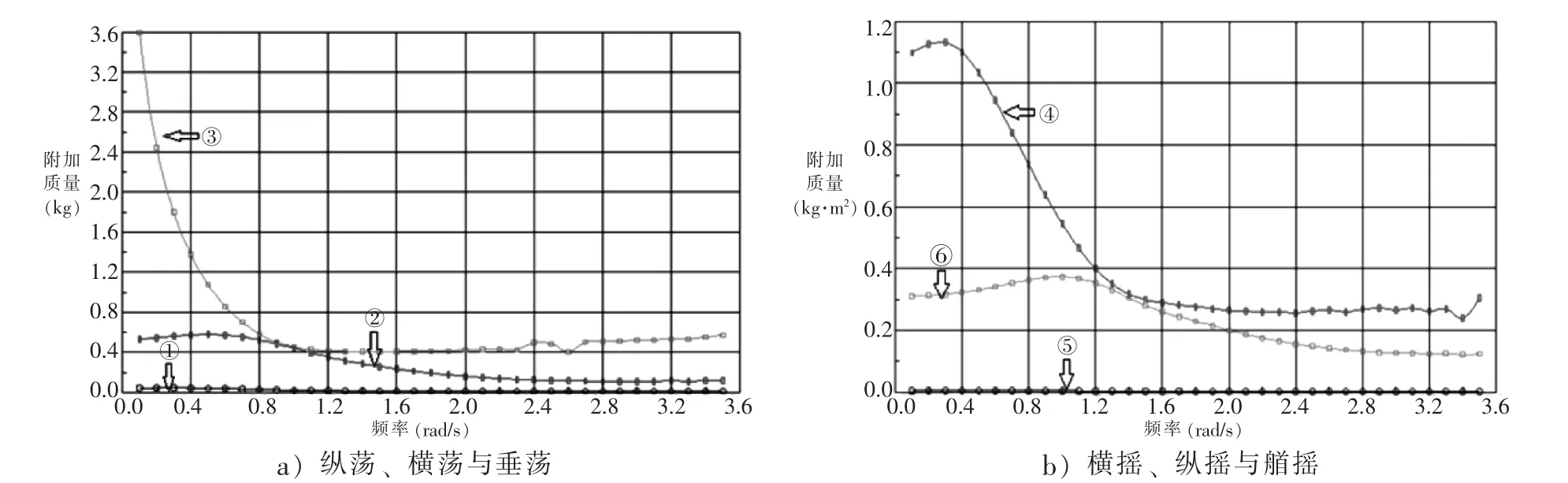
图5 船体附加质量
图6 船体辐射阻尼
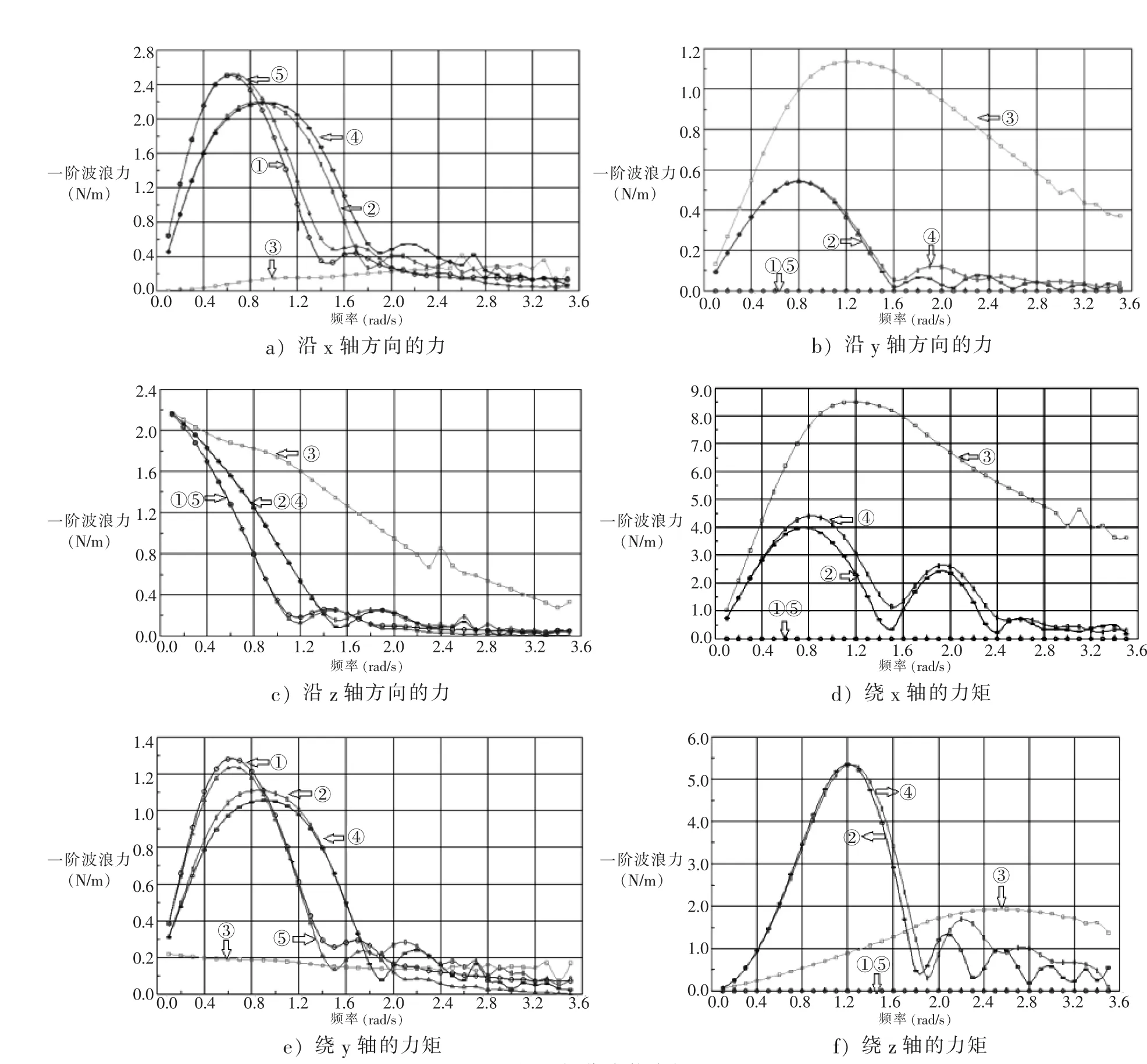
图7 振荡波激励力
4 结论
渔船在港池内,水深较浅时,船体在低频长波下的纵荡和横荡运动响应RAO、垂荡和纵摇附加质量较大,同时一阶波浪扰动力在纵荡、纵摇、横荡和横摇这四个自由度的低频区域变化幅度较大,需要注意低频长波下船体的运动情况。波浪频率在0.8~1.2rad/s时,船体的横摇和纵摇运动响应、垂荡和纵摇辐射阻尼系数均达到极大值。其中,在浪向90°、波浪圆频率0.8rad/s时,船体的横摇最为剧烈。对于渔船稳性而言,主要考虑其横摇运动和进水角的影响,因此,在极限台风天气时,渔船应选择迎浪方向停泊以减小横摇角,同时对渔船系泊系统的设计,应尽量采取八字系泊方式,使其固定在一定范围内,以减小船体横摇运动,减小船体倾覆风险。海况对渔船稳性有着很大影响,恶劣海况下船体六自由度运动更加剧烈,应重点关注船体在波浪圆频率为0.6~1.2rad/s的响应运动,可以通过优化船体型线、舱室配载和渔船系泊系统等方式提高船体稳性,以确保船体的安全。
猜你喜欢
湖州师范学院学报(2023年8期)2023-10-17 12:42:36
作文小学高年级(2023年5期)2023-09-06 19:57:41
舰船科学技术(2022年20期)2022-11-28 08:19:52
廉政瞭望(2021年15期)2021-08-23 04:55:22
商周刊(2018年19期)2018-12-06 09:49:41
弹箭与制导学报(2018年3期)2018-08-28 03:06:42
石油地球物理勘探(2017年2期)2017-11-23 06:01:17
小学科学(学生版)(2016年5期)2016-12-05 11:02:11
焊接(2015年9期)2015-07-18 11:03:51
海军医学杂志(2015年2期)2015-02-27 13:47:42