
施工升降机防坠安全器便携式检测装置研究
2020-06-15 01:52:26许志立卢立东
建筑机械化 2020年5期
许志立,卢立东
(广州特种机电设备检测研究院,广东 广州 510000)
根据国家标准GB/T 34025-2017《施工升降机用齿轮渐进式防坠安全器》规定,防坠安全器必须在定期检验的有效期内使用,其定期检验周期为1 年。防坠安全器无论使用与否,在定期检验有效期届满时都应重新进行检验与标定[1]。
动作速度、制动距离和制动减速度是防坠安全器的重要性能参数,是检验时判断其是否合格的重要指标。根据GB/T 34025-2017《施工升降机用齿轮渐进式防坠安全器》标准要求,对防坠安全器动作速度、制动距离和减速度参数测量方法包括试验架法和试验台法。
试验架法由装有齿条的导轨架、吊笼、吊笼提升装置和测量传感器等组成,吊笼在导轨架上自由下落,并被安全器制停,期间测量出所需要的动作速度、制动距离和减速度等参数。试验台法由无级调速装置、飞轮、转矩转速传感器或其他等效测量仪器组成,又称卧式试验法,安全器整体安装在试验台上,利用无级调速装置触发安全器动作,在动作过程测得安全器动作速度、制动加力弹簧的压缩量等参数。两种方法各有优缺点:试验架法能够模拟安全器的实际工况,可以测量所有的参数,但该方法安装测试不便,效率比较低;试验台法适合在实验室对安全器进行标定检验,效率高,适用于批量检验,但该方法不能模拟安全器的实际工况,不能测量安全器的制动减速度,且测量制动距离误差较大[2~3]。
本文提出的便携式施工升降机防坠安全器检测装置属于试验架法测量方式,可测量GB/T 34025-2017《施工升降机用齿轮渐进式防坠安全器》中要求的所有参数,且由于其便携性,可直接对工地在用施工升降机防坠安全器进行检验标定工作,出具标定检测报告,省去防坠安全器拆卸工作,提高效率。同时也可以实现施工升降机定期检验时的坠落试验项目的检验测量。
1 便携式检测装置系统介绍
我院开发的施工升降机综合实验台,可以进行施工升降机整机性能试验、可靠性试验及防坠安全器试验(图1)。本文所介绍便携式检测装置是该实验台完成防坠安全器试验的主要组成部分。

图1 施工升降机综合检验实验台
便携式检测装置由位移传感器、数据采集处理器、通讯处理器、数据计算分析及显示等部分组成,各部分均轻巧便捷,方便携带(台式电脑可由笔记本电脑代替)。便携式检测装置既可以在实验台完成试验,也可以独立运用在工地现场完成试验;其试验模式分为自动模式和人机交互模式:①自动模式中需把坠落试验线引入系统接口,通过坠落试验的操作控制界面控制吊笼的运行,并通过控制记录开始及结束的操作按钮界面实现试验的自动化;②人机交互模式试验方法,即由操作人员运行吊笼到一定的位置,进行坠落试验,同时试验人员进行数据采集,两者分别独立完成。坠落试验结束,整个试验过程中的位移、速度、加速度和时间的曲线关系即可获得,进而找出防坠安全器制动速度,计算制动距离与制动加速度,得出试验结论。
2 关键技术研究
2.1 防坠安全器结构及动作过程
防坠安全器主要由齿轮、离心式限速装置、锥鼓形制动装置等组成(图2)。正常工作状态时,防坠安全器上的齿轮与导轨架上齿条啮合运动,齿轮轴随之转动,离心块在弹簧力的拉紧作用下与离心块座紧贴在一起。当吊笼下行运行速度超过安全器标定的动作速度时,离心块克服弹簧的作用力向外甩出,使其与锥形铁芯内壁的凸缘接触,进而带动锥形铁芯旋转,使装在外锥体轴端的铜螺母做轴向移动,压紧碟形弹簧;在碟形弹簧的反作用力下,锥形壳体与锥形铁芯之间压紧力增大,制动力矩增大,阻止吊笼向下运行,同时安全开关动作,切断电源,至吊笼停止[4]。
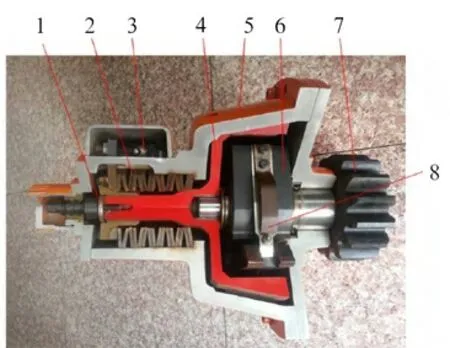
图2 防坠安全器结构图
防坠安全器坠落试验的运动过程为:操作吊笼上行至坠落试验高度后停止,吊笼速度为零,开始坠落试验,吊笼下落速度逐渐增大,其下降的加速度(考虑摩擦力的作用)应该小于重力加速度g(9.8m/s2),当速度增大到触发防坠器动作时(tc时刻),防坠器动作,该速度即是防坠器动作速度。由于渐进式防坠器制动力是逐渐增大的,所以吊笼下降速度在防坠器动作后,仍然有一小段时间是增速下降的(现场试验证明该时间段非常短暂,采集过程中可以忽略),直到向下运动加速度的减小到零,速度不再增加,达到速度极值,然后向下减速运动,加速度(即制动减速度)由零变负并反向增大到极值,使速度迅速变小,直至停止,速度为零(ts时刻),减速度亦有极值迅速变化为零。则tc与ts两个时刻的吊笼的位移之差即为制动距离[5]。该过程在加速度曲线上的反应即为加速度发生变化,斜率突然变为负值时,该拐点就是动作时间,即为tc时刻,是系统获取的关键。速度-时间曲线如图3 所示。

图3 速度时间曲线
如果获取了该坠落试验过程中任一时刻的位移值,即时间-位移(s,t)坐标,再通过速度、加速度和位移三者之间的计算关系,即可获取(v,t)、(a,t)坐标曲线,判断动作时刻tc和ts,计算得到坠落试验所需参数。所以如何获取准确可靠的时间-位移(s,t)曲线是关键。
2.2 位移传感器的选择
安全器试验时主要的测量参数包括动作速度、制动距离和减速度。速度、加速度和位移三者之间的关系:通过位移时间函数对时间求导,可得到速度时间函数,所得速度时间函数再次对时间求导,即可得加速度时间函数。
当前市场上常见的防坠安全器检测测试系统主要有3 种:①分别测量不同的信号作为初始信号;②选择加速度信号;③选择速度信号。基于位移、速度和加速度的计算关系,考虑到施工升降机齿轮齿条的传动形式,其运行过程中振动较大,速度、加速度信号测量噪声大,不易测量,且制动距离是安全器各试验的重要指标参数,位移值的测量是更为直接、准确的一种测量方式。故本系统选择位移信号作为初始测量参数,选择位移传感器作为系统信号采集装置。
防坠安全器坠落试验所用位移传感器的最大行程为15m,属于大量程的位移测量,常见的测量传感器有绕线位移传感器、激光位移传感器等。
1)激光位移传感器 由于产生激光的装置相对复杂,且激光位移传感器的体积较庞大,因此其应用的范围和一些应用的条件是非常苛刻的,且其采样频率低,不能满足本系统的要求。
2)拉绳式位移传感器 特别适合直线导轨系统,具有输出方式多样、量程大、响应速度快、精度高、安装方便、使用可靠、价格低廉等优点,且工地在用施工升降机在运行过程中自身振动大、噪声多,拉绳式位移传感器的抗干扰能力更强,非常适合应用到该系统中。
本系统选择拉绳式位移传感器(图4)作为系统的信号采集元件。

图4 拉绳式位移传感器
2.3 卡尔曼滤波信号处理方法
对于采集到的位移信号,选择合适的信号处理方法,去除噪音及畸变信号,是系统的关键。
防坠安全器的动作过程是一个变加速度值的加减速运动。具体到位移信号s是一个恒增过程,即后一时刻的位移值总大于前一时刻的位移值。
卡尔曼滤波是通过系统输入输出观测数据,对系统状态进行最优估计的算法。鉴于防坠器的动作过程和运动趋势,及测量原理,本系统中采用了卡尔曼滤波的信号处理方法。
卡尔曼滤波是一个最优化自回归数据处理算法,其以前一时刻的最优估计为准,预测下一时刻的状态变量,在预测值与此时刻的观测值之间进行分析(或者说是后者对前者进行修正),从而得到该时刻的最优状态估计值。运用该算法可以合理地去除一些畸变信号,减少系统测量误差。
3 结语
作为检测机构的测量工具,本套装置经过专业计量机构校准,各测量参数均在误差范围内,满足要求。2 年多来,已累计检测设备80 多台,出具安全防坠器标定检测报告20 多份,且已经较多地应用于施工升降机定期检验时的坠落试验项目中,取得了不错的效果。
猜你喜欢
湘潭大学自然科学学报(2023年6期)2024-01-26 06:29:58
当代水产(2022年6期)2022-06-29 01:12:20
建筑机械化(2022年6期)2022-06-15 08:02:12
化工装备技术(2021年4期)2021-08-21 07:53:54
中国特种设备安全(2019年4期)2019-05-20 09:56:10
好孩子画报(2019年10期)2019-01-10 02:15:30
石油工程建设(2018年6期)2019-01-07 03:25:40
汽车观察(2018年12期)2018-12-26 01:05:42
中国特种设备安全(2018年10期)2018-12-18 02:17:02
金桥(2018年4期)2018-09-26 02:24:46
