基于卡尔曼滤波器-PID的水泥磨出口温度控制研究
2020-06-15 08:39姚连国乔俊奇周立东陈燕伏
河南建材 2020年5期
姚连国 乔俊奇 周立东 刘 超 陈燕伏
中材建设有限公司(100176)
在当前的生产过程控制系统中,大部分的控制回路仍采用结构简单、鲁棒性强的PID控制策略。PID控制作为一种经典的控制方法,几乎遍及了整个工业自动化领域,是实际工业生产过程正常运行的基本保证;控制器的性能直接关系到生产过程的平稳高效运行以及产品的最终质量,因此控制系统的设计主要体现在控制器参数的整定上。PID控制的基本思想是将偏差的比例、积分和微分三参数通过线性组合构成控制器,对被控对象进行控制。随着计算机技术的飞速发展和人工智能技术在自动控制领域的不断渗透,出现了各种实用的PID控制器整定方法。PID控制器作为最通用的控制模块,对它进行参数整定有许多方法;对于不同的控制要求、不同的系统先验知识,可以考虑采用不同的方法;这些算法既要考虑到收敛性、直观性、简单易用性,还要综合考虑干扰及过程变化的影响,并能根据较少的信息和计算,给出较好的结果。文章设计的卡尔曼滤波器-PID控制系统,可以通过卡尔曼滤波器对温度信号测量时的白噪声干扰进行滤波,从而获得较为精准的温度值,避免由于干扰产生的误差影响控制效果,进而影响水泥的质量和产量。
1 水泥磨出口温度控制系统的参数
水泥磨出口温度间接反映磨内温度,而磨内温度直接影响水泥的产量。温度过高,细粉水泥的静电会增加,其吸附能力便会增强,从而加重了糊球、糊衬板和糊篦板现象,减小了粉磨作用,降低了粉磨效率,增加了粉磨电耗;同时导致选粉机风叶、导向片黏附粉尘增加,水泥的分散性降低,使得选粉效率降低,加大了粉磨系统的循环负荷率,降低了水泥磨的台时产量;磨机在高温下运行,易造成轴承温度升高,油膜形成困难,润滑作用降低,甚至引起磨机跳停;此外,高温还会使磨筒体产生一定的热应力,引起衬板螺丝折断,危及设备安全。温度过低,会导致石膏脱水不完全,最终影响水泥产量。
因此,水泥磨出口温度至关重要,而热风炉对水泥磨出口温度有绝对的影响,所以我们选择热风炉电磁阀的开度作为控制量。
2 基于卡尔曼滤波器的控制器系统组成
PID控制的基本思想是将偏差的比例、积分和微分三参数通过线性组合构建成控制器,从而实现对被控制对象的控制。由于对控制品质的要求越来越高,并且控制对象越来越复杂,特别是在具有干扰噪声的系统中,因PID控制器的局限性,控制器的参数难以自动调整,不能达到理想的控制效果。我们将卡尔曼滤波器与传统的PID控制相结合,利用卡尔曼滤波器的滤波功能,将滤波后的信号反馈给PID控制器,达到减小噪声对系统的影响、提高控制品质的目的。基于卡尔曼滤波器的PID控制系统由两部分组成:第一部分是传统的PID控制器,直接对被控制对象进行闭环控制;第二部分是卡尔曼滤波器,将输入与输出的偏差、控制量及系统的输出进行整合,达到性能指标最优化、改善控制效果的目的。基于卡尔曼滤波器的PID控制系统如图1所示,其中:W为控制干扰噪声信号(也称过程噪声),V(t)为干扰噪声,yv为受到干扰后的输出信号,y0为经过卡尔曼滤波器处理的输出信号。
3 热风炉电磁阀开度控制器设计
热风炉为水泥磨系统提供热量,让其保持一定的温度,从而提高水泥的产量。但是通过热风炉电磁阀控制水泥磨出口温度时,外界的干扰因素会影响出口温度的测量精确度,所以我们考虑利用卡尔曼滤波器将干扰降到最低,以保证出口温度的控制精度,进而保证水泥磨处于最佳生产状态。
通过上述考虑,我们设计了一个利用水泥磨出口温度参数来控制热风炉电磁阀开度的控制系统,如图2所示。预设一个水泥磨出口温度值,通过控制热风炉电磁阀的开度来控制喷油量,使水泥磨出口温度发生改变。将温度采样信号通过卡尔曼滤波器进行滤波,输出最优温度值,然后进行反馈,达到控制水泥磨出口温度保持恒定的目的。
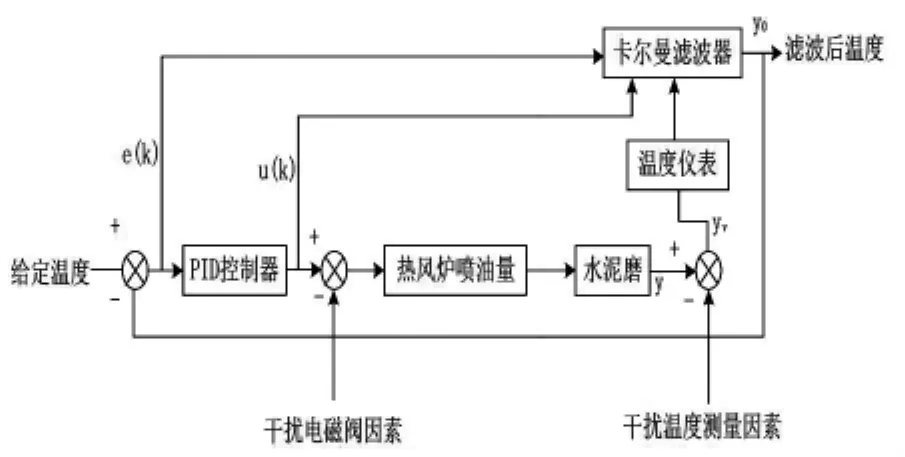
图2 热风炉电磁阀开度控制图
4 卡尔曼滤波器-PID控制器实验仿真
设置控制干扰信号W和测量噪声信号V均为0.045,输入为阶跃信号,仿真时间为20 ms。分别采用普通PID控制和基于卡尔曼滤波器的PID控制进行仿真。
可见:常规PID控制系统经过几次超调后便可稳定在指定状态,但在调节过程中存在几次超调,受白噪声的干扰较大;基于卡尔曼滤波器的PID控制系统的过渡时间较短,在过渡过程结束后系统即进入指定的运行状态,并很好地抑制了白噪声污染的干扰,能输出更精准的信号。
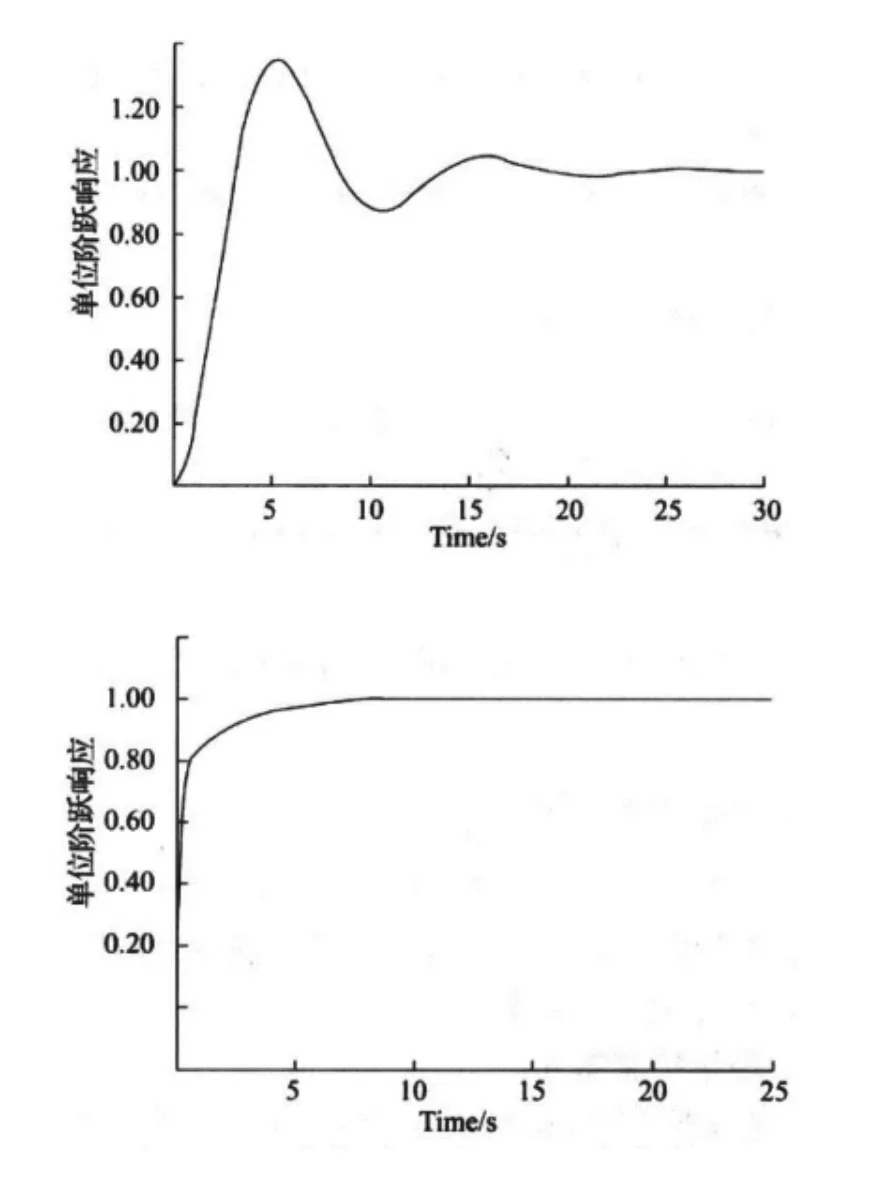
基于卡尔曼滤波器的PID(右)图3
5 总结
文章对基于卡尔曼滤波器的PID控制系统进行了仿真,仿真结果证明了该方法有效。卡尔曼滤波器-PID控制系统能很好地削弱白噪声对水泥磨出口温度信号的干扰,可以得到一个稳定的系统输出,显著减小噪声的影响,减少震荡次数,收敛较快,能对出口温度的变化做出迅速的反应,保证出口温度恒定,提高水泥生产的质量和产量。
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
节能与环保(2022年3期)2022-04-26
北京航空航天大学学报(2021年7期)2021-08-13
科学与财富(2021年33期)2021-05-10
北京汽车(2021年2期)2021-05-07
发电技术(2020年3期)2020-06-29
天津冶金(2020年2期)2020-04-24
昆钢科技(2020年6期)2020-03-29
电子制作(2019年23期)2019-02-23
戏剧之家(2018年21期)2018-10-19