汽车线控转向系统研究进展综述
2020-06-12 11:39刘杰
汽车世界·车辆工程技术(下) 2020年1期
关键词:自动驾驶
刘杰
摘 要:本文主要针对汽车线控转向系统展开研究,先阐述了线控转向系统的组成和布置方式,然后在路感反馈控制策略中,主要论述了反馈力矩估计、路感电机控制等,最后结合车辆运动状态控制、转向执行控制等,以此来对线控转向执行控制策略进行论述,旨在将汽车线控转向系统的应用价值充分发挥出来,致力于车辆行驶安全性目标的实现。
关键词:汽车线控;自动驾驶;路感反饋控制
对于自动驾驶汽车来说,在实现路径跟踪方面,线控转向是重要的一大技术,其性能对主动安全和驾乘体验产生了极大的影响。现阶段,自动驾驶汽车的推广力度大大增强,对汽车产业中长期发展规划进行分析,在未来,将会实现完全自动驾驶汽车,针对线控转向技术,可以给予驾驶员操作和车辆运动馆的解耦一定的保障,即使面对紧急情况,也有助于将转向操作正确性提升上来,并确保驾驶员安全行驶目标的实现,而且线控转向系统,在高级自动驾驶中发挥着重要的作用,所以应对线控转向系统的研究予以高度重视。
1 线控转向系统的组成和布置方式
1.1 线控转向系统组成
对线控转向系统的特点进行分析,主要是从转向盘到转向执行器间的机械连接,其构成主要包括路感反馈总成、转向执行总成等。其中,在路感反馈总成中,对其功能进行分析,主要是驱动路感点击,有助于给予控制器给出的反馈力矩指令一定的保障,确保驾驶员驾驶的路感具有较高的适宜性。
1.2 线控转向系统的典型布置方式
转向电机的数量和布置位置具有一定的差异性,对线控转向系统的典型布置方式进行分析,主要包括双电机前轮转向、双电机独立前轮转向等。
2 路感反馈控制策略
2.1 反馈力矩估计
在反馈力矩相关测量过程中,要加强传感器的应用,借助扭矩传感器的应用,可以对齿条力矩进行直接测量,为估算反馈力矩提供一定的依据。
目前,诸多高校在仿真基础、在实车上,具备线控转向系统装备,加强车辆模型的应用,确保估算的准确性,进一步对反馈力矩估计算法的设计创造条件。在文献中[1],借助整车动力学模型,对自回正力矩进行估计,对相关参数进行分析,如转向侧偏角和正压力等。而结合非线性车辆模型,对反馈力矩进行计算,对轮胎的非线性的阻尼参数进行分析,确保与侧向加速度过大情况形成高度的适应性,同时加强加权函数的应用,给予助力转向功能相应的补偿。该算法在较大侧向加速度等工况中具有较高的适用性,但是如果摩擦模型的准确性难以保证,会造成蛇型试验误差的出现。
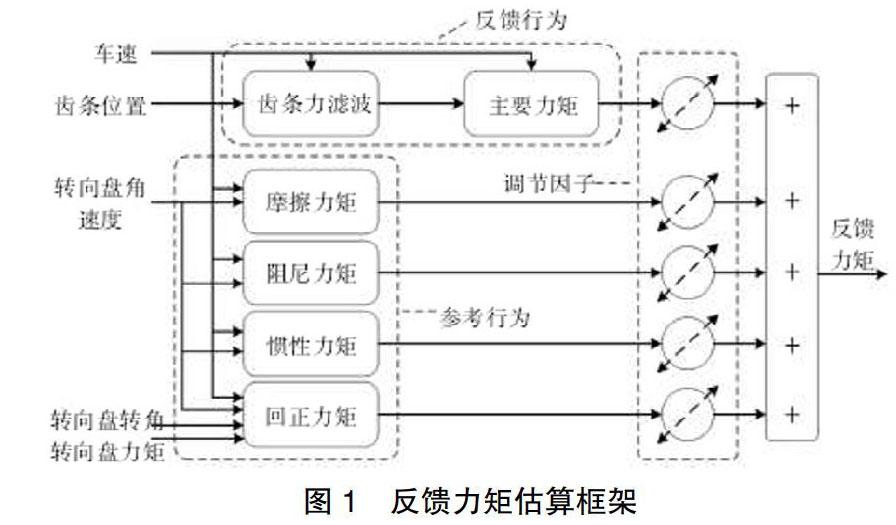
参数拟合,可以为反馈力矩估计提供很大的帮助,诸多文献借助不同的转向盘转角和车速等,合理划分反馈力矩,将其划分为不同部分,但是不同文献针对力矩的产生原因,具有不同的解释,如相关文献中,对反馈力矩估计算法的要求较高,其力矩计算模块如图1所示。
2.2 路感电机控制
路感电机,应对位移-力矩综合控制的实施予以高度重视,及时反馈上层估计算法获取的力矩反馈,将驾驶员路感的精准性提升上来,PID反馈控制,在控制方法中比较常见,并对前馈控制进行分析,确保响应速度的稳步提升,同时在路感电机控制中,也要对复杂的干扰因素进行分析,以免影响到驾驶员路感。
在线控转向系统中,路感电机通过PID控制的应用,基于高速换道的情况下,对力矩控制予以了高度重视,借助侧向风测试,以此来合理化调整反馈力矩控制。结合相关文献,通过参考模型,确保前馈控制环节的顺利获取,并在轮胎力的估计方面,主要借助反馈和前馈控制,其中在反馈环节中,线性和非线性的状态反馈为重要的构成内容。
3 线控转向执行控制策略
3.1 车辆运动状态控制
要想确保预期车辆运动状态目标的顺利实现,应对传动比控制予以高度重视,具体来说:对其目标进行分析,旨在实现高速时转向的稳定性。通常来说,传动比在低速情况下,取值比较小。线控转向系统,由于传动轴机械结构限制的消除,所以传动比具有较为广阔的设计空间。
在文献[2]中,对变增益的线控转向系统角传动比控制策略展开了设计,侧向加速度增益不变,在高速段设计中得到了充分体现,而在低速段中,主要结合主观评价试验,以此来对传动比进行确定。
3.2 转向执行控制
在上层控制的指令中,转向执行器具有较强的接受能力,借助电机或液压系统,为跟踪控制提供一定的帮助,将车轮转角控制的精准性提升上来。在控制转向电机过程中,对线控转向系统的不确定参数进行分析,加强转向电机自适应前馈扭矩控制器的设计,加强齿条速度误差的应用,以此来对参数估计器进行计算。同时,在对转向电机的控制过程中,将电流传感器予以去除,将高频电流注入到控制中去,确保转向点击电流环的闭环控制的实现。
4 结束语
总之,对于线控转向来说,在自动驾驶中发挥着重要的作用,由于自动驾驶汽车的智能化水平大大提升,线控转向控制策略,在环境适应性和驾驶智能化等方面的作用不容忽视。在当前驾驶辅助阶段发展到完全自动驾驶阶段中,要想与转向系统要求相符,线控转向控制策略应进行进一步改进。
参考文献:
[1]赵建书,鲁秀伟,陶松,曹俊芳,程诗瀚.线控技术在汽车转向系统中的应用分析[J].时代汽车,2019(04):140-141.
[2]周伟东,李隽杰,邵宏亮.浅谈转向系统对车辆交通安全的影响和发展趋势[J].净月学刊,2017(05):120-123.
猜你喜欢
南风窗(2017年23期)2017-11-23
科技创新导报(2017年26期)2017-11-08
科学与财富(2017年28期)2017-10-14
中国计算机报(2017年22期)2017-09-16
山东工业技术(2017年15期)2017-09-05
中国科技术语(2017年3期)2017-07-10
汽车周刊(2017年5期)2017-06-06
中国科技纵横(2017年4期)2017-05-16
移动通信(2016年24期)2017-03-04
家用汽车(2016年9期)2016-11-04