
仿生机器人模糊自适应控制系统设计研究
2020-06-12 01:21:18李雨田
工业加热 2020年4期
李雨田
(西安航空职业技术学院, 陕西 西安 710089)
随着仿生机器人技术的发展,不仅用于自动化施工过程,还用于执行质量管理任务。例如,飞行无人机可以检查高层建筑物或者可以用于执行摄影测量;远程机器人可用于检查轴、空调系统和检修孔等;爬升机器人用于检查建筑物的桥梁、塔楼和隐藏的困难角落等。通过智能解决方案以执行检查任务的成功严格取决于机器人控制系统的性能、设计机制的稳定性和可靠性以及现场条件的识别程度。这是由于后者可能会给机器人移动带来重大障碍,例如,对于四旋翼飞行器的垂直起飞和着陆飞行机器人,当高度增加时稳定性趋于最小化[1-3]。
回顾机器人的控制方法,可以说不同的末端执行器机构的同步对于开始运动并因此跟踪期望的轨迹是必要的。例如,必须控制旋翼飞行器UAV,以便产生所选转子组合的等效旋转速度,以便在四种飞行状态之间切换:悬停,滚转,俯仰和偏航。 对于步行机器人,位于不同身体轴线侧的腿必须基于触发器状态工作,以便移动机器人的重心并使其从其当前位置移动。以上这些描述称为运动模式,本文讨论了一个四足机器人,对玻璃幕墙进行检查。该研究将局限于运动末端执行器的数学模型,基于原型模式的全局路径规划控制。
1 仿生行走技术介绍
在工程概念中,通过机械装置实现运动,这是由于机械装置产生升力和扭矩。与周围环境相互作用的末端执行器可以是轮胎、链条和螺旋桨等。对于行走单元,不同的概念是“脚”接触地面,行走机构最少分为三个机械部件,并且根据需要完成的操作和移动自由度,可以达到更高等级的复杂性。在行走时,末端执行器施加平行于主运动轴线的力,同时执行器的谐振频率取决于行走速度[4-5]。
虽然仿生行走单元可以分为较小的功能组件,但是步行过程表现为单输入单输出系统。采用多系统方法是不明智的,因为从动力学,反馈控制和信号分析的角度来看,多系统执行不是最佳使用方法。之后,学者们研究单独组件如何工作,如何与其他组件集成以及如何使整合系统的整体性能不受影响。从机器人技术的角度来看,该技术任务是局部的,并且可以在群体控制下进行分类,其中群体指定在自适应同步机制中工作的不同机制的组合,以便实现全局控制任务。
基于仿生研究,步行过程被归类为预期前馈(主动)调节,这是对外部刺激作出反应的最重复行为的情况。更复杂的步行系统包括更复杂的刺激产生和协调控制。这种节奏动态也被称为中心模式控制,其控制图如图1所示。

图1 四足机器人中心模式控制的结构
在图1中,参数描绘如下:具有指数1~3的神经元是运动神经元,其中神经元1和2用于左右操纵,神经元4是感官神经元,C1到C4是中间神经元。箭头表示兴奋性连接,无箭头表示抑制性连接,由图1可以看出,C1和C3之间存在抑制连接,从而允许产生振荡模式。称为周期性步态的腿部运动之间的同步需要规则和时间控制,否则被抑制的腿将充当“断车”。因此,不能实现步行过程的平滑性,并且预测可能对机械部件造成损坏,移动机器人可能步态的一般组合计算如下[6-8]:
NG=(2n-1)!
式中:NG为给定机器人的可能步数;n为机器人的腿数,本文中,n=4。
2 仿生控制腿设计
从稳定性角度来看,最优控制策略是分别为每条腿设置缓存控制器,然后根据周期性步态推广触发器规则,这种循环配合是必要的,以便获得机械部件的平滑和自然振荡。减少能量消耗,因为振荡将在没有电力先决条件的情况下获得,该方法的另一个好处是最小化机械部件的磨损频率,因为不需要任何断裂和断裂释放机构。
除了同步和定期步态控制外,姿势控制对于安全运动至关重要。通过姿势控制,可以了解控制系统在可控稳定的调节中保持腿部质心的能力,从设计的角度来看,质心几何点应该在几何焦点和体内,从而使机器人在侧风的情况下具有更好的机动性。
除了同步和定期步态控制外,姿势控制对于安全运动至关重要,通过姿势控制,可以了解控制系统在可控稳定的调节中保持腿部质心的能力。 从设计的角度来看,质心几何点应该在几何焦点和体内,从而使机器人在侧风的情况下具有更好的机动性。
因此,步行机器人的全局控制任务包括以下子任务:
(1)姿势控制与腿的运动学配置相关联;
(2)姿势控制负责质量位置的居中,主要通过动态分析进行研究;
(3)摆动控制根据前两种方法忽略不同机构之间的频率同步。
腿式机器人的建模和控制是一个局部技术问题。许多来自不同科学背景的研究人员将他们的研究成果定期结合起来,以获得适当的数学模型。正如前面所述,最简单的方法是对机器人的每个模型腿采用分散控制,同时考虑中心模式发生器。该模式描述如下:当人走路时,根据需要(大脑的预定轨迹)定义该行人的运动方向,将这种需要传达并制定成脉冲(中央发电机),将信息传递到本地控制站(分散控制器),对末端效应器施加某些行为,以上描述应用到仿生机器人的实现。参考中心模式发生器的分散控制任务的结构图如图2所示,可以注意到,每个支路的所需时刻是从模式注册器获得的所需扭矩τd,输出是施加的扭矩加载τl,其中后者通过电动机旋转速度进行调制,如下式所示:
(1)
式中:ωM为电机角速度,r·min-1;Jl为负载惯量;p为拉普拉斯算子;Kst表示刚度系数。
使用电机角速度很容易找到电机转矩,而电机角速度又可以从角位置找到,因此,形成式(2):
(2)
从式(2)可以看出,旋转力矩中的惯性项Jl不出现在等式的右边。在上述情况之后,显然腿的位置(姿态控制)对于摆动机构并不重要,因此控制任务被公式化为基于速度的方法。
同时考虑电机控制器的优化,以避免速度过冲,这是必要的,因为将允许机器人更好的机动性和避障以及最小化机械干扰。神经网络的实现是直截了当的,从PID马达控制器收集的数据将用于评估和训练具有外源输入的非线性自回归神经网络,同时考虑所需的输出和腿部的机械效应,图3为控制方法的模拟仿真结果。

图2 分散腿控制的Simulink模型
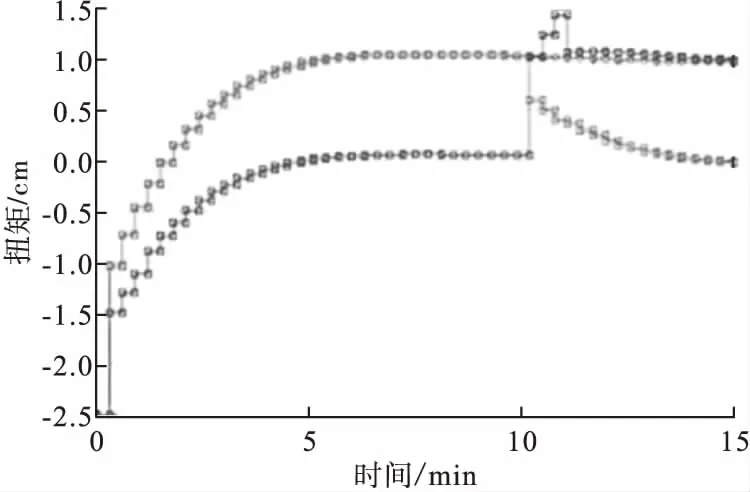
图3 FLP控制腿L1和R1实验结果图
图3所示的结果可以理解如下:根据由模糊逻辑模式生成器产生的生成模式,将四足机器人的末端执行器运动的组合指定为控制任务。末端执行器输出的监视和调节由神经网络控制器管理。正如结果所示,腿系统成功地在腿部的激励和抑制状态之间切换,允许腿R1和R2在三个阶段中向前移动一步。
3 结 论
本文主要介绍了仿生机器人自适应控制系统,通过仿生行走原理以及仿生行走的实现设计,并且从实验结果可以清楚地看到处理时间从1.5 s增加到3.5 s。这是由于模糊逻辑模式发生器分析姿势和姿态控制反馈增加了所需的时间。因此,在滑动时间中考虑神经网络响应时间,这证明了关于机器人自动驾驶仪的计算时间和能力的假设。
猜你喜欢
科学大众(2024年5期)2024-03-06 09:40:34
今日农业(2021年4期)2021-06-09 06:59:58
公民与法治(2020年20期)2020-11-27 01:44:46
测控技术(2018年12期)2018-11-25 09:37:50
电子制作(2018年18期)2018-11-14 01:48:04
自动化学报(2018年6期)2018-07-23 02:55:42
制造技术与机床(2017年9期)2017-11-27 02:13:45
中学生数理化·八年级物理人教版(2017年3期)2017-11-09 03:05:35
自动化学报(2016年8期)2016-04-16 03:38:51
自动化学报(2016年5期)2016-04-16 03:38:49
