
水下信息感知系统及其关键技术
2020-06-12 04:05陈韶华
数字海洋与水下攻防 2020年2期
陈韶华,张 恒
(中国船舶重工集团有限公司第七一〇研究所,湖北 宜昌 443003)
0 引言
在信息化时代,人类要认识海洋、开发海洋,首先要研究海洋,感知海洋水下信息,发现海洋科学规律[1]。
水下信息的范围非常广泛。从信号与信息处理的角度,水下信息可分为水下目标信息与海洋环境信息。水下目标信息通过声、光、磁、电等物理场携带,远程信息感知常用的是声场信息。海洋环境信息主要包括海洋环境噪声、海水的温-盐-深剖面、海流剖面、涡流、内波、锋面、海水密度、海水水质、海底底质等。
海洋水下信息感知对于海洋安全、海洋物理学与海洋气候的研究有非常重要的价值。本文讨论水下信息感知系统组成、分布式水下信息感知网络与水下信息感知的关键技术。
1 水下信息感知系统
水下信息感知系统包括岸基、船基、海床基、潜标、浮标、UUV、水下滑翔机、波浪滑翔器与水面无人艇等,能搭载传感器进行水下观测的载体都可构成水下信息感知系统。
在大时空跨度内对一定的区域进行海洋观测和信息采集,是当前海洋信息感知的重要发展趋势。水下无人系统的快速发展,为大范围海洋水下信息感知提供了有效途径[2]。水下无人系统可分为移动式与固定式2种。移动式系统主要包括水下无人航行器(Unmanned Underwater Vehicle,UUV)、水下滑翔机等,固定式系统主要包括锚系潜标与海床基等。这2种系统各有优点:移动式系统有自主动力,执行任务更灵活机动,可潜入危险区域或敏感区域进行接近观测;固定式系统的结构相对简单,不因运动而耗能,可支持长时间监测和数据记录,不会产生有源噪声,可进行隐蔽观测。
1.1 水下信息感知系统组成
水下信息感知系统主要包括载体、中心控制单元、传感器、信号调理电路、数据记录仪与电源。对数据有实时处理要求时包括数字信号处理器,对信息有实时传输要求时还包括通信模块。组成结构如图1所示。
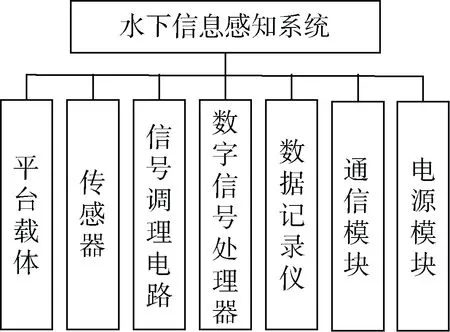
图1 水下信息感知系统组成结构Fig. 1 Structure of underwater information perception system
水下信息感知系统搭载的传感器种类繁多,感知声信号的包括水听器、矢量水听器等。为了形成空间上的指向性,提高对弱信号的感知能力,感知目标与噪声信息的传感器通常以阵列形式存在,如水听器阵、磁场传感器阵、电场传感器阵等。感知平台姿态的传感器有磁罗盘,感知平台深度的传感器有压力传感器等。感知海洋环境的传感器包括海水电导率、温度与深度传感器CTD,声速度、温度与压力传感器SVTP,声学多普勒流剖面仪ADCP,水质传感器(溶解氧DO,pH,硝酸盐,pCO2,浊度、环境特征感光ECO),核辐射(伽玛射线)监测传感器等。
信号调理电路用于将传感器微弱信号滤波放大,大容量数据记录仪用于记录采集的信号,记录能长达几个月之久。数字信号处理器用于对采集信号进行检测分析、提取声源信号特征、计算声源的空间分布与运动态势、提取海洋环境或目标特征、识别声源的属性。通信模块用于水下分布式节点之间传输信息,此时采用水声通信。有时需要把水下信息发送给空中无线数据链,则采用水声/无线电模块,或释放有缆/无缆通信浮标。移动载体如UUV或水下滑翔机可以上浮到水面,通过无线电模块发送信息。
1.2 固定式信息感知系统
固定式信息感知系统通过锚系或座底方式监测水下目标与环境信息。
图2是中国船舶重工集团有限公司第七一〇研究所研制的实时传输潜标,它是一种单点锚系海洋信息感知系统。如图2(a)所示,该潜标由流线型主浮体、锚泊系留系统、测量传感器、多套通信浮标、综合控制中心等组成,可搭载ADCP、CTD、垂直线列阵、矢量水听器等多种传感器,测量数据包括ADCP剖面测流数据、多点温度、盐度、深度、海洋噪声等数据。潜标布放后,通信浮标定时浮出水面,将数据通过卫星传输回岸站,图2(b)是释放通信浮标的示意图,潜标的尾部是温度链。
实时传输潜标既可进行深海水文环境要素长期连续、定点多层隐蔽监测,又可及时将测量数据传输到地面数据中心,具有系统集成度高、观测隐蔽、不易遭受破坏、数据时效性强等特点,具备进行海洋灾害预报和军事预警的能力。
主要性能指标如下:
1)布放水域深度4 000 m,主浮体布放深度80~300 m;
2)测流剖面范围0~500 m(双ADCP观测),盐温剖面测量深度800 m;
3)主浮体意外浮水后能自动报警(实时GPS位置及观测数据);
4)水下工作期限为12个月。

图2 实时传输潜标Fig. 2 Real-time transmission sub-buoy
图3是法国的MIR 2000便携式多种物理场感应系统。系统同时测量交直流磁场、交直流电场、声感应场、水压/水深、地震感应场、磁场梯度。

图3 MIR 2000便携式多物理场感应系统Fig. 3 MIR 2000 portable multi-fields sensing system
主要性能指标:
1)自主工作时间为4 h;
2)操作深度<50 m;
3)多芯同轴电缆长100 m;
4)内载设备重100 kg。
1.3 移动式信息感知系统
移动式水下信息感知系统包括AUV、水下滑翔机等。以中国船舶重工集团有限公司第七一〇研究所的“海鲟”水下滑翔机为例(如图4所示),它是一种能对中远海多种海洋要素进行自主、实时、机动测量的新型平台,可搭载观测仪器包括CTD传感器和ADCP。主要性能指标如下:
1)总重量<90 kg,总长度<2.2 m (不含天线),壳体直径<0.24 m;
2)观测要素:温度、盐度、压力、海流;
3)探测深度1 200 m;
4)续航力低速(0.5 kn)航程≥1 500 km,高速(1.2 kn)航程≥500 km;
5)最大水平滑翔速度为1.5 kn;
6)通信定位:北斗+无线电或铱星+无线电。

图4 “海鲟”滑翔机Fig. 4 C-Glider
图5是水下滑翔机搭载CTD与声压水听器阵收集的声速剖面与声脉冲信号[3]。

图5 水下滑翔机收集的声速剖面数据和脉冲声信号Fig. 5 SVP and pulse signal collected by a glider
2 分布式水下信息感知网络
随着水下传感器技术、自主处理技术、无人航行器技术、通信和网络技术的快速发展,采用自主式无人传感器节点并组网形成区域水下信息感知网络是未来水下信息感知的发展趋势。无人传感器网络的优点是低成本、无人值守、可广域和长时间获取水下信息。
分布式水下信息感知网络一般由传感器节点、主节点和网关节点组成[4],如图6所示。
1)传感器节点。
主要包含传感器与水声Modem。传感器节点用于海洋环境信息获取,对传感器阵列信号进行处理,把信息发送给主节点。

图6 分布式信息感知网络组成示意图Fig. 6 Composition of distributed underwater information perception network
2)主节点。
主节点是网络的核心。主要用于接收探测节点传来的信息,对信息进行融合处理,还要进行网络管理,每个主节点可控制几十个传感器节点。主节点把信息融合处理结果发送给网关节点,同时接收网关节点传递来的上一级指控中心的指令。
3)网关节点。
网关节点指网络与上一级指控中心传输信息的节点,一般用水声-无线电浮标或有缆通信浮标、AUV、水下滑翔机等可上浮到水面的移动载体。上级指控中心接收网关节点发送的信息,并与其他情报、监视和侦察(ISR)系统的情报相结合,融合处理,获得海洋环境与目标态势比较完整的图像。
从逻辑功能看,水声网络主要包括物理层、数据链路层和网络层。物理层主要解决数据有效传输的问题,包括信道特性的利用和调制方法的选择。数据链路层解决多个用户怎样合理有效利用信道(媒体访问控制MAC),主要包括媒体访问方式和纠错控制。网络层解决路由问题,研究信源与信宿之间的路径,而这又取决于网络的拓扑结构[5]。
分布式水下信息感知网络平时可作为收集信息的有效手段,担负情报、监视和侦察(包括声场海洋数据获取)等任务,对目标进行探测、分类、定位和跟踪[6]。
一个典型的水下信息感知网络是美国的海网(Seaweb)[7],如图7所示。Seaweb是一种海底水声传感器网络,通过用水声通信链路将固定节点、移动节点和网关节点(水面浮标)连接成网。固定节点是一组驻留水下的自治节点,包括可部署传感器节点和水声中继节点。移动节点指潜艇、无人水下航行器等。水声通信接口实现与Seaweb网络的水声通信链接,无线通信接口提供Seaweb网络与岸基、飞机或卫星的无线链接。到目前为止,Seaweb是规模最大的在研实用水声网络,其网络节点已达17个。已具有较强的自组织能力,如自动进行节点识别、时钟同步(0.1~1.0 s量级)、节点自定位(100 m量级)、节点更新和失效后的网络重新配置等。
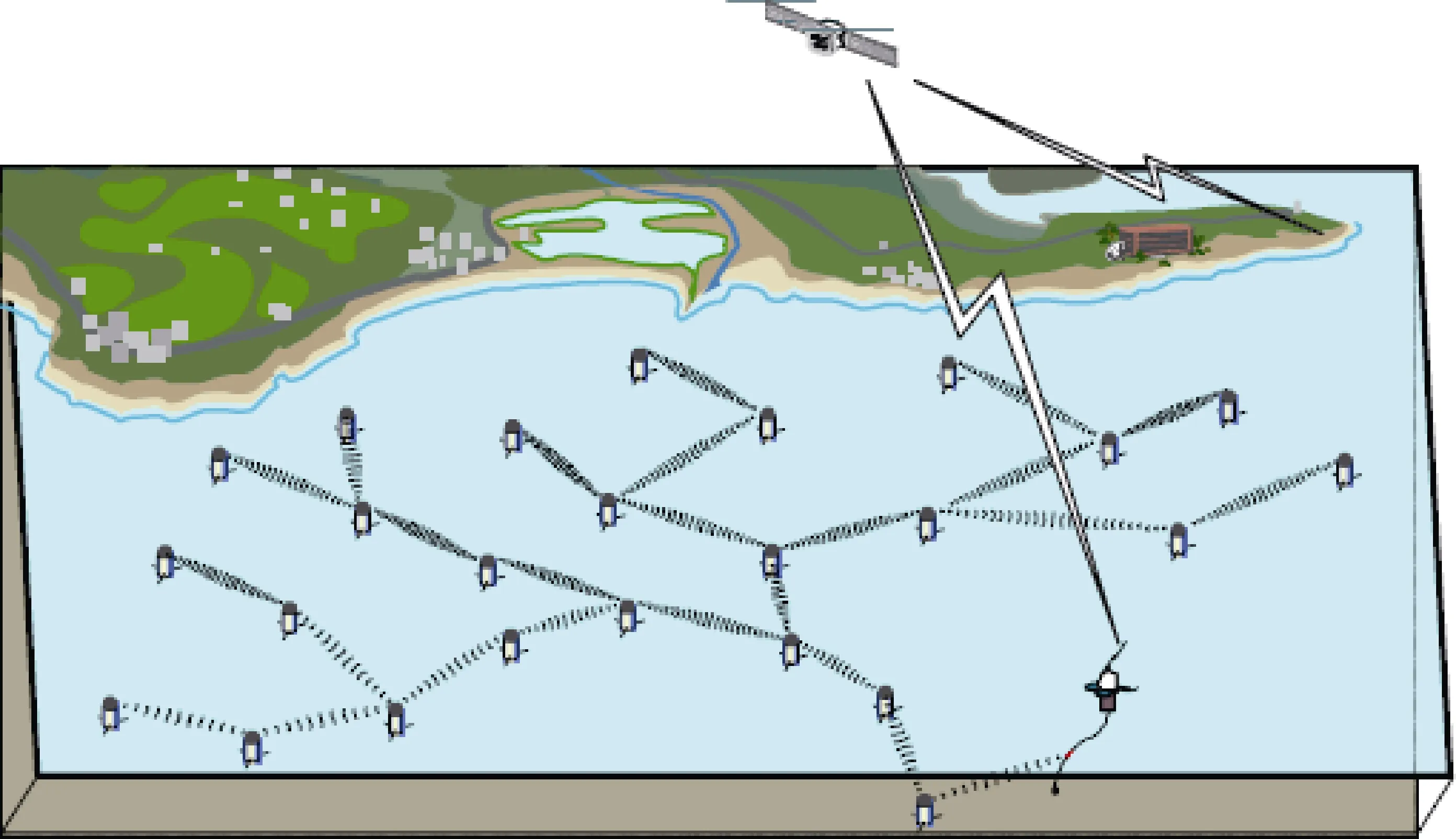
图7 Seaweb示意图Fig. 7 Sketch map of Seaweb
3 水下信息感知的关键技术
水下信息感知系统采集海洋环境与目标数据,进行特征分析、信号检测与分类识别等处理,从复杂海洋背景中提取目标信息。主要关键技术如下。
1)目标信息获取。
声信息获取的常用方法是采用传感器阵列接收信号,对信号进行调理放大与动态范围控制,转换为数字信号后进行波束形成、宽带分析与窄带分析处理,检测信号并估计目标参数。
不同于人在回路的声呐探测,传感器节点自主获取目标信息面临3方面的限制:①固定节点或移动节点的尺度都比较小,一般只有几米量级,难以布设大规模基阵提高空间增益;②海洋环境背景非常复杂,除了海洋环境噪声会掩盖微弱信号外,近海存在大量相干干扰源,如果探测系统不具备多目标分辨能力,很难在这些复杂干扰背景中分辨出微弱目标信号,特别是对于无人系统;③能源的限制,需要考虑系统复杂性与功耗不能太大。
水下平台载体上还可集成磁、电场、地震波等传感器获取目标多物理场信息。舰船磁场包括静态磁场与交流磁场,交流磁场传播距离较远。舰船的腐蚀和防腐电流经螺旋桨转动的调制后在海水中会产生极低频电场(ELFE),成为一种重要的特征信号源[8]。但是,微弱目标的交流磁场与极低频电场信号提取是个需要解决的问题。地震波场传播距离远,但需要解决干扰背景复杂的问题[9-10]。
2)目标分类和识别。
目标分类仍是被动探测最为困难的方面,尤其是在嘈杂和地形复杂的浅海区域。人在回路的情况下,分类是由良好训练的声情报操作员完成的。目前能自动完成这一功能的计算机算法还不完善,通常可以提取信号的波形特征、功率谱特征(包括连续谱和线谱)、调制谱特征、倒谱特征、空间分布特征、目标运动特征等,对这些特征进行提炼压缩,通过神经网络等工具训练和测试。分布式系统通过提供多角度的视野和增强的特征,应该可以有所帮助,但是还有很多关键问题没有解决。在不太远的距离上,利用声场、磁场、电场、地震波场等多物理场特征信息进行融合识别,是提高目标分类能力的有效途径。
3)水下通信。
网络化水下监测系统各传感器节点之间通常采用水声通信传输信息,监测系统与上一级网络信息传输的网关节点一般采用水声-无线电浮标。水声通信的数据率与误码率等性能指标严重受限于水声信道,水声信道最显著的特征是可用带宽窄、多径扩展长、信道起伏快、多普勒效应强,使得通信速率低、误码率高、中断概率大、传播时延长。在有些水文条件下,接收端可能处于发射端的声影区导致无法通信。水声通信的另一个问题是很难隐蔽。采用指向性波束和宽谱编码能降低被截获概率,但能量探测仍是相当有可能的。使用电缆传输存在如何部署的问题。
4)水下组网。
多节点互连形成网络,可扩大数据传输距离和监测覆盖范围,更好地实现信息共享。MAC协议主要解决多个用户共享信道的问题,这是由于水声信道传播延时大、通信速率低,多用户时冲突严重。小规模水声网络一般采用轮流分配时隙的TDMA主从式MAC协议,1个6节点的小型网络需要数分钟才能轮到机会发送信息,效率较低。混合型协议综合不同的多址接入方式与接入协议,是目前水声网络MAC协议研究的热点[11]。
恶劣的水声传播条件也为路由选择带来很大困难。由于节点的移动,海洋环境的严酷性使水声通信易出现故障或短暂失效,导致水下网络拓扑具有高动态性,引发路由变化,需要定期维护。水声链路不稳定、丢包率高,使路由建立和数据包转发效率均不高,可能需要反复重传。这2个特点使路由维护能耗高。
5)分布式网络探测。
从表面上看,分布式目标探测的概念有许多优越性,由广泛分布的声传感器实现的各式各样的探测机会是很吸引人的。然而,被动探测基本上受到信号水平、噪声水平和可用阵列及处理增益的限制。那么,许多个具有小增益的分布式传感器,与高阵列增益的大型传感器相比,是如何实现观察和探测的?能否像蚁群或蜂群那样,由大量的个体行为发掘出某种群体智能?
分布式水下信息感知网络所关注的是传感器网络的综合探测能力,而不是单个传感器节点的探测能力。在单个传感器性能测量有明显不确定性的情况下,需要有某种形式的度量方法,用来优化传感器的配置,使分布式网络得到有效利用和控制[6]。
4 结束语
分布式水下无人信息感知网络是未来海洋水下信息感知的发展趋势。发展低成本水下信息感知传感器节点,提高水下自主探测识别与信息传输能力,是分布式水下信息感知系统大规模应用的关键。
猜你喜欢
电气技术(2022年8期)2022-08-20
今日农业(2021年17期)2021-11-26
计算机应用与软件(2021年10期)2021-10-15
军民两用技术与产品(2021年5期)2021-07-28
数字海洋与水下攻防(2020年5期)2021-01-04
小型微型计算机系统(2020年5期)2020-05-14
火力与指挥控制(2020年1期)2020-03-27
华东师范大学学报(自然科学版)(2019年5期)2019-11-11
福建文学(2019年12期)2019-08-06
扬子江(2016年1期)2016-05-19
