
基于CAN总线的固定测斜仪数据采集系统设计
2020-06-11 07:01刘昌明黄跃文刘亚翔
仪表技术与传感器 2020年5期
刘昌明,时 朵,黄跃文,刘亚翔,张 乾
(1.武汉科技大学冶金装备及其控制教育部重点实验室,湖北武汉 430081;2.武汉科技大学机械传动与制造工程湖北省重点实验室,湖北武汉 430081;3.长江科学院工程安全与灾害防治研究所,湖北武汉 430010)
0 引言
由于对大坝、边坡、基坑等内部纵深处变形监测的不到位,容易引发溃坝、滑坡、基坑坍塌等事故,为减少事故的发生,对其进行内部纵深处变形安全监测十分必要。李心一[1]提出研制多点固定测斜仪;任桂香[2]等采用固定式电子堤防测斜仪实现对大坝的变形监测;程远超[3]等设计了高精度测斜仪。但以上方法存在共性问题,即测斜仪之间采用的均为RS-485或RS-232总线串接方式,此种数据连接方式具有可靠性低,应用不灵活,通信误码率高等问题[4];并且监测结果也只能在PC端查看,未设置移动端的监测方式,降低了监测的灵活性与实时性。为解决上述问题,本文研究开发的数据采集系统采用基于CAN总线的通讯方式,并以此为基础设计了固定测斜仪,对大坝、边坡、基坑等进行内部纵深处变形监测,CAN总线增设了防雷功能,使其在雷雨天气具备更强的抗干扰能力;设计了数据采集单元,对数据进行采集、存储和远程通讯,并增加了蓝牙通讯模块,实现移动监测;搭建了监测结果的显示界面,使监测结果查看更方便、直观[5-6]。
1 数据采集系统的整体设计
基于CAN总线的数据采集系统由固定测斜仪、数据采集单元和监控服务器构成。本系统将一定数量的固定测斜仪根据工程需要组成不定长度的链式结构安装到监测对象中,监测内部纵深处变形,再通过CAN总线的通讯方式将固定测斜仪监测到的数据传送到数据采集单元,进而通过无线传输的方式将处理好的数据上传至监控服务器,PC端、移动端可随时通过发送指令实时查看监测结果。实现对大坝、边坡、基坑等内部纵深处变形的自动化远程监测,及时的对事故的发生采取补救措施和预防。数据采集系统整体示意图如图1所示。

图1 数据采集系统整体示意图
其中固定式测斜仪由高精度倾角传感器、24位A/D转换芯片、STM32F103微处理器组成。倾角传感器采集内部纵深处变形数据并将其转换为模拟的电压值,通过24位A/D转换芯片把模拟信号转换成数字信号,STM32F103微处理器对数字信号进行滤波和计算,最终由CAN通讯接口将采集的数据传输至数据采集单元。
数据采集单元的硬件选用STM32F407VET6作为主控模块微控制器,CAN总线接口ADM3051芯片以及以太网W5500芯片控制器作为网络接口模块,蓝牙模块选用TICC2540芯片的HM-11,存储模块则用W25Q128JV芯片。由CAN总线串行作为固定测斜仪部分的传感器接入点,获取传感器节点数据并存储,通过以太网或者无线的方式上传至监控服务器;移动端可通过蓝牙连接实现现场数据查看。
监控服务器实现将实时上传的数据进行存储、分析、处理、可视化等功能。
2 固定测斜仪的电路设计
固定测斜仪电路设计分为电源模块、测量模块、主控模块和通讯模块。电源模块为其他模块供电;测量模块则通过传感器获取实时数据,经主控模块处理,由通信模块将数据传至数据采集单元,如图2所示。

图2 固定测斜仪整体框图
2.1 电源模块
电源是保障系统平稳运行的基础,由于整体电路中涉及到模拟电路采样,并且整体工作电流不大,为避免高频开关信号对模拟信号采集的干扰,未使用DC-DC电路进行电压转换,电源采用三级降压设计,支持外部供电电压为12~26 V,配合自恢复保险丝,钽电容等,保证电源质量稳定。第1级电路降压至9 V,第2级电路降压至5 V,为传感器芯片和基准电压芯片供电,第3级电路降压至3.3 V为微控制器、24位A/D转换芯片和CAN总线通讯芯片等供电。电源模块电路原理图如图3所示。
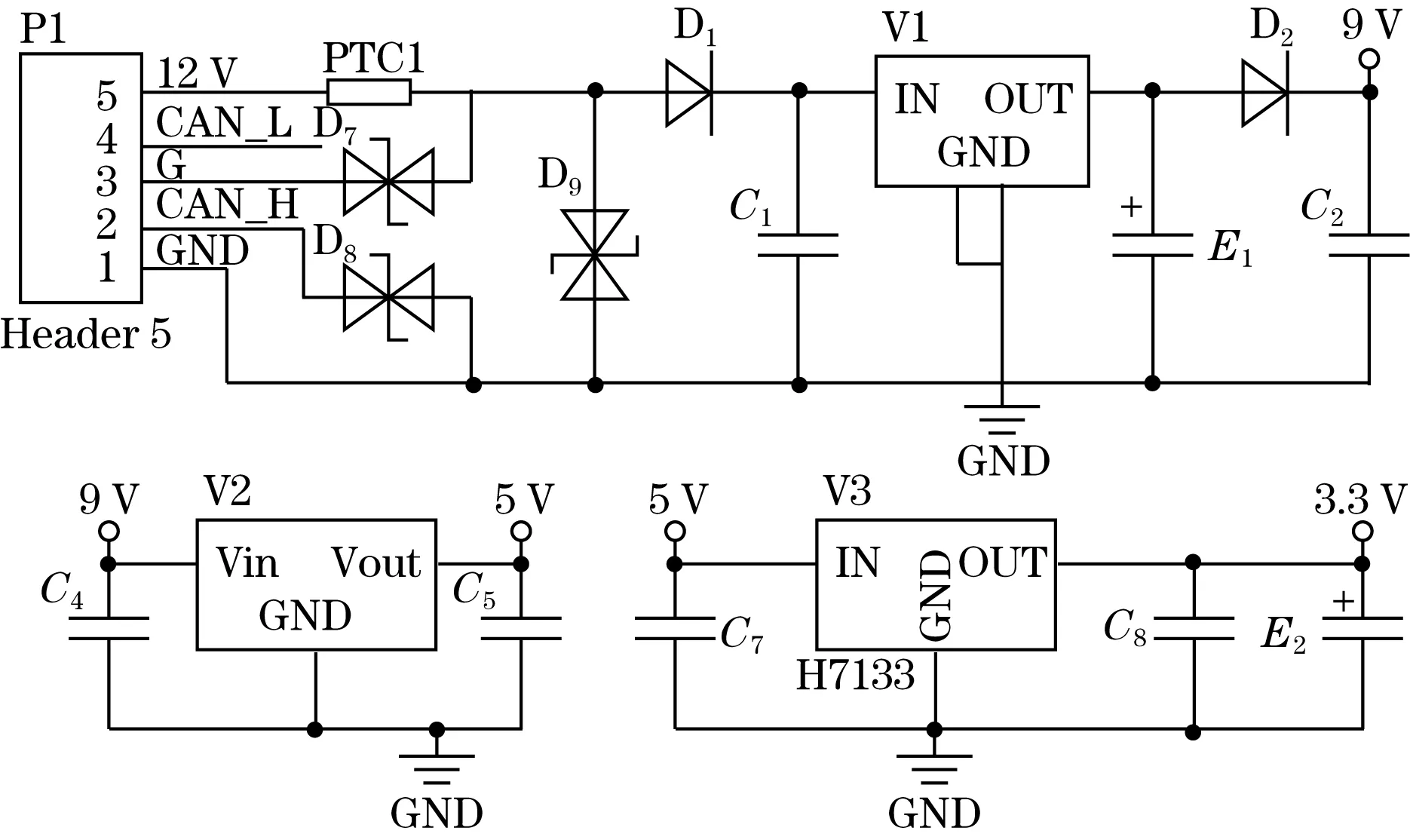
图3 电源模块原理图
2.2 测量模块
测量模块主要由两个单轴倾角传感器SCA103T-D04和24位A/D转换芯片构成。倾角传感器量程达±15°,具有温度自补偿功能,同时有SPI数字和模拟信号双输出模式,数字输出分辨率可达0.009°。倾角传感器工作原理是内置三层平行硅片,当传感器发生偏转,致使中间层硅片偏离原始位置,改变了极板间的间距从而引起电容变化,使电容两端的输出电压改变,最终通过计算将电压变化量转化为角度偏移量,实现角度测量。
为测得电容两端电压变化量,设计了电压测量电路,如图4所示,由高精度电压基准芯片和24位A/D芯片构成。电压基准芯片选用高精度低温漂的ADR45系列电压基准芯片,根据测量电压范围需要选择4 V基准电压。24位A/D芯片选用ADS1247,该芯片能够提供四路单端模拟信号输入和两路差分模拟信号输入,使用两路差分采样方式获取传感器输出的模拟电压信号。该芯片的采样速度快,稳定性好,能够很好的满足使用需要。
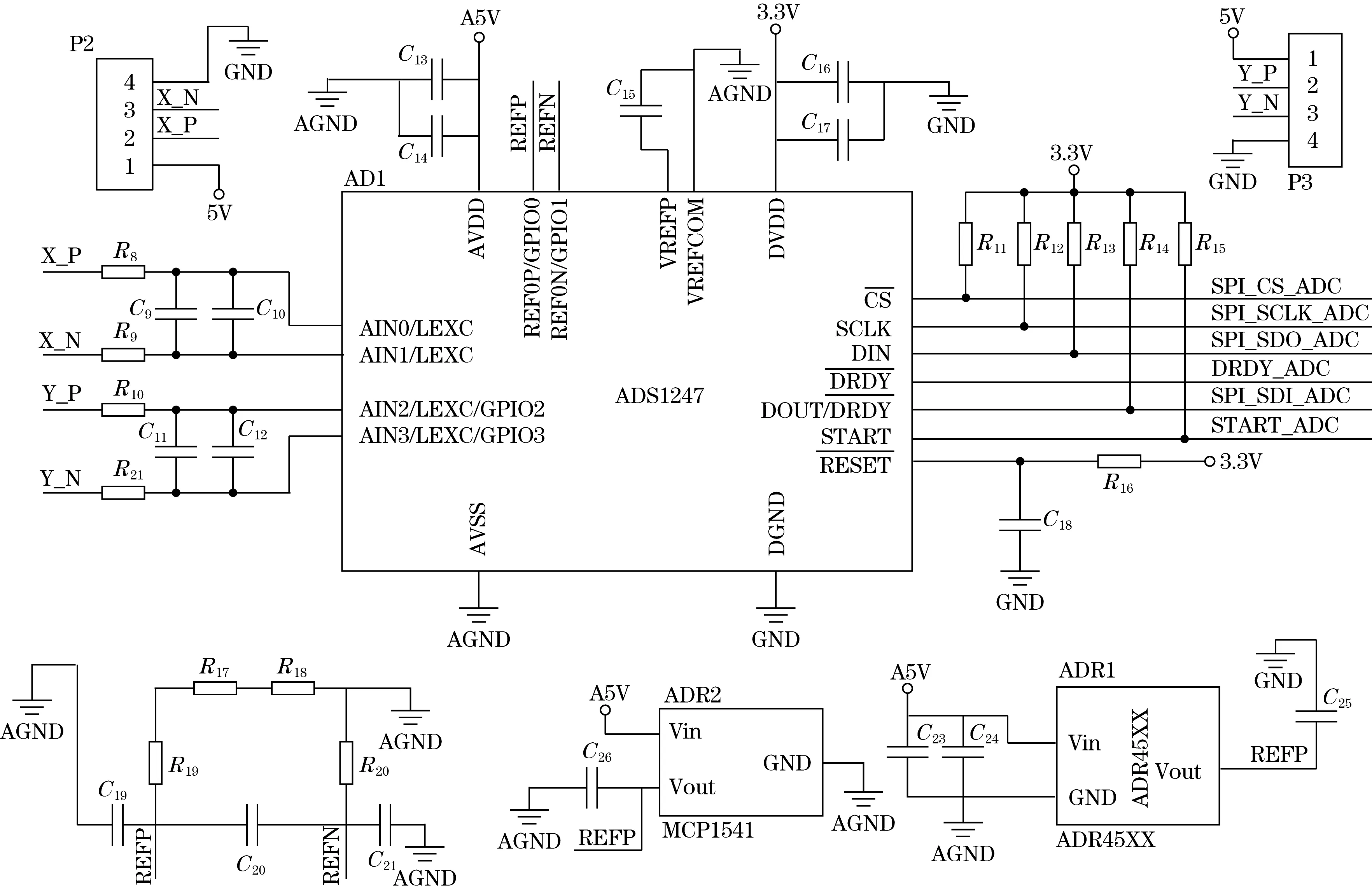
图4 测量模块电路原理图
测量模块在监测数据时,通过主控模块的微控制器向ADS1247的SPI端口发送RDATA命令字,将返回的电压值进行反余弦计算得到变形角度值,为消除随机噪声给读数带来的干扰,预测出准确数值,将角度值送入卡尔曼滤波器进行滤波处理。
考虑到卡尔曼滤波器在连续系统中的理想效果,以及对数据采集单元下发的读数指令做出快速响应,整个读取数据的过程重复不间断运行,保证滤波器的输出值实时且准确。
2.3 主控模块
主控模块选用STM32F103CBT6微控制器,如图5所示,运用RC振荡器作为内部时钟信号,无需外部提供晶振,运行频率为8 MHz,并启用内部看门狗模块保障程序正常运行。因STM32F103系列单片机具备内部FLASH自编程功能可以在程序运行时对内部未使用的FLASH单元进行自编程,将运行参数,校准参数,静态信息等写入FLASH中进行保存,免除了扩展外部FLASH或EEPROM。

图5 主控模块原理图
2.4 通讯模块
通讯模块原理图如图6所示,采用CAN总线接口电路,使用TJA1050T芯片作为接口转换芯片,并附加保险丝和TVS管对CAN通讯接口进行保护。
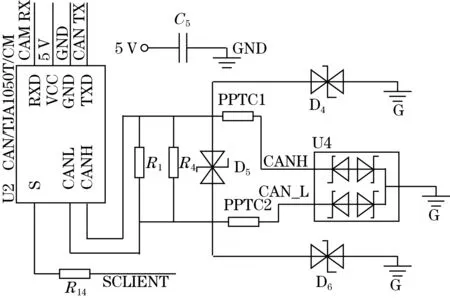
图6 通讯模块原理图
在通讯采用CAN总线的情况下,为提高通讯效率,固定测斜仪与数据采集单元之间的通信协议采用modbus总线协议,modbus总线协议具有帧格式简单、紧凑、用户使用简单的优点。特别是固定测斜仪与数据采集单元之间使用CAN总线通信,CAN总线的每个通信帧字节数限制在6字节以内,而modbus协议的紧凑特点能够适应这个限制,最大化的提高通信效率。
3 数据采集单元设计
数据采集单元是整个系统中的重要部分,直接影响着系统的稳定性以及可靠性。良好的设计能够保证数据传输的质量。
数据采集单元的主控制器选用STM32F407VET6微处理器,采用LQFP的封装方式,可靠性高,封装体积小,工作频率高达168 MHz。具备较好的性能和各种外设资源,包括CAN、RTC、I2S、I2C、SPI、USB、UART、USART等。自带512KB Flash闪存。
设置实时时钟RTC,其具有独立的BCD定时/计数器。自带一个时钟日历、两个可编程的闹钟中断和一个有中断能力的周期性可编程的唤醒标志。
外部存储器使用128 M位空间大小的W25Q128JV串行闪存。W25Q128JV有4 096个可擦除扇区和256个可擦除块。W25Q128JV提供标准串行外设接口SPI。支持自身的SPI时钟频率高达133 MHz。
CAN总线的物理层收发器选用ADM3051。该芯片能够以高达1 Mbps的数据速率运行。且芯片具备热关断和限流功能,可预防12 V总线供电系统中总线与地或电源端之间的输出出现短路情况。
嵌入式以太网控制器W5500芯片是一个硬连接的TCP/IP。提供了与嵌入式系统更简单的互联网连接。使用嵌入式TCP/IP堆栈、10/100以太网MAC和PHY的单芯片,实现互联网连接。
蓝牙模块HM-11系列的采用TICC2540芯片,支持AT命令,调制方式为GFSK,工作频率2.4 GHz传输数据无字节限制,传输速率可达6Kbps,具有相对传输距离远,超低功耗,体积小等优点。
软件部分每个模块在单独的文件内编写和测试,在主函数中调用子模块功能函数。同时,开启了看门狗定时器,在程序运行出现意外故障时会产生超时复位,保证了采集功能的连续正常使用,数据采集单元软件设计如图7所示。
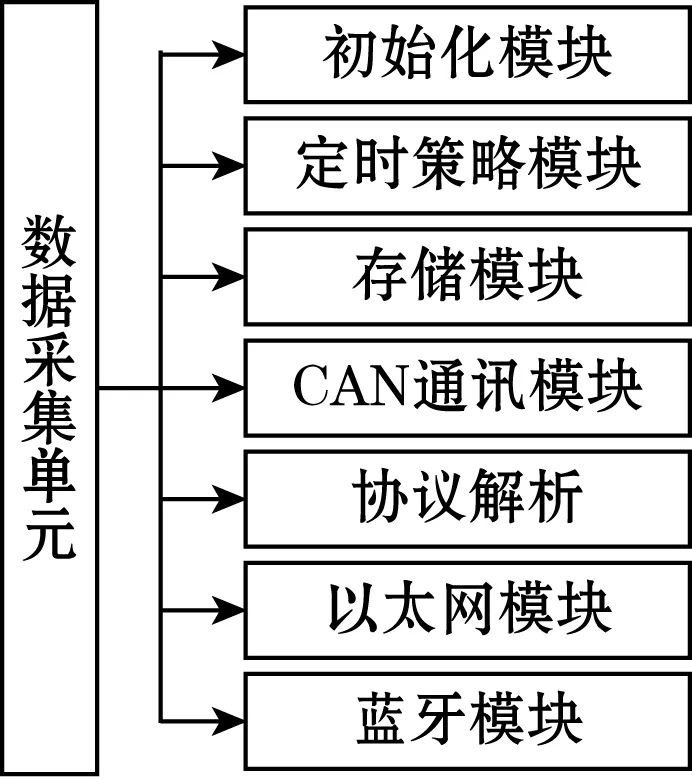
图7 数据采集单元软件模块示意图
初始化模块:设置处理器内部和外围芯片寄存器使得系统能按初始状态开始工作,包括设置时钟寄存器、GPIO寄存器、看门狗寄存器、UART寄存器、CAN寄存器、SPI寄存器等;
定时策略模块:根据储存模块内的定时采集时间间隔策略,在实时时钟RTC中设置闹钟中断,在中断回调函数中调用固定式测斜仪数据读取指令;
储存模块:存储定时采集时间间隔策略和包含时间标签的采集数据,提供通过时间范围查询历史数据的功能;
CAN通讯模块:通信协议采用的是CAN总线标准帧协议进行通讯,允许多个设备连接在同一个网络上进行通信。由CAN通信模块向固定式测斜仪发送读取数据命令,对固定式测斜仪的回应进行解析;
协议解析:解析和打包Modbus协议帧;
以太网模块:接收解析PC端下发的通信指令,打包数据向PC端返回通讯指令。
蓝牙模块:包含蓝牙初始化程序,串口中断接受程序。蓝牙模块初始化后进入待机状态,然后移动端APP控制程序搜索到可连接蓝牙设备,在移动端选择该蓝牙进行配对后,开始数据传输,实现移动监测。
4 监控服务器设计
监控服务器主要功能包含数据同步、数据分析、数据可视化以及人机交互等。
监控服务器使用B/S架构开发,打开浏览器即可使用,这种架构具有维护方便、分布性广、开发相对简单且共享性较强等优点。监控服务器数据处理流程如图8所示。
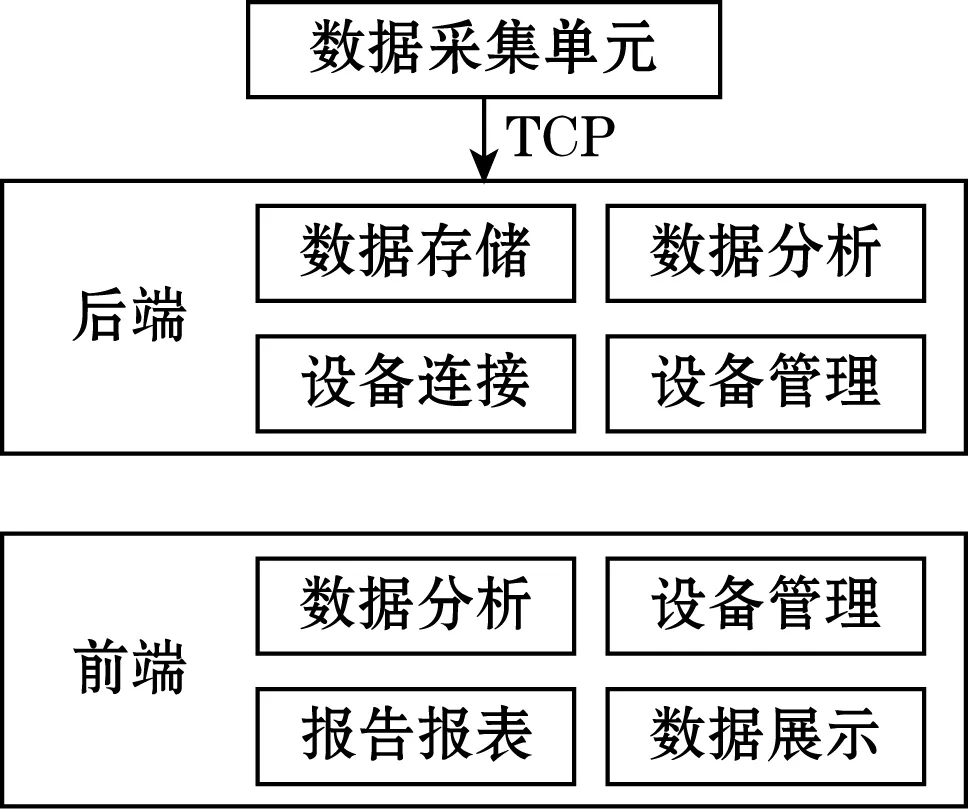
图8 数据处理流程图
后端使用node.js开发平台和sqlite数据库。数据采集界面如图9所示,数据采集单元由TCP方式连接到服务器的后端程序,主要功能如下:
数据存储:实现ORM功能,抽象出数据模型,方便程序调用数据;
数据分析:包括异常值处理、多点采集仪联合计算、可视化数据预生成等;
设备管理:采集仪设备的在线状态记录和设备配置管理功能。
前端程序使用Vue.js框架开发,具有易用灵活高效的特点,实现人机交互和数据直观显示。

图9 数据采集界面示意图
5 结论
本文基于CAN总线通讯方式设计了一套固定测斜仪,系统集成了数据采集单元以及监控服务器,针对大坝、边坡、基坑等的内部纵深处变形进行监测,实现了内部纵深处变形的自动化监测,有效提高了数据传输的可靠性,稳定性以及通讯抗干扰能力;同时实现了监测结果的移动监测,兼具预警预报功能,完善了基体内部纵深处的监测手段,能够及时准确地预测溃坝、滑坡以及基坑坍塌等事故的发生。
猜你喜欢
茶叶通讯(2022年2期)2022-11-15
茶叶通讯(2022年3期)2022-11-11
机械研究与应用(2022年4期)2022-09-15
工业设计(2022年7期)2022-08-12
家庭影院技术(2018年10期)2018-11-02
电子制作(2018年11期)2018-08-04
家庭影院技术(2018年3期)2018-05-09
中国科技信息(2016年19期)2016-10-25
空间控制技术与应用(2015年2期)2015-06-05
舰船科学技术(2015年8期)2015-02-27
