不安全越界行为的个性化实时检测*
2020-06-11 01:03张淋均谢艾伶王维兰
计算机与生活 2020年6期
林 强,张淋均,谢艾伶,王维兰
1.西北民族大学 数学与计算机科学学院,兰州730124
2.西北民族大学 中国民族语言文字信息技术教育部重点实验室,兰州730030
1 引言
如何确保老年人在户外的安全,是人口老龄化时代养老服务面临的重要难题之一。受记忆衰退和身体机能下降的影响,老年人户外迷路甚至走失的事件时有发生,而且有相当比例的走失案例就发生在老年人生活所在的熟悉区域。限制活动范围或者不允许外出,虽然能够预防走失事件的发生,但与老年人的日常生活不符。这是因为,人口老龄化时代,大部分老年人需要自己照料自己的生活。此外,限制活动自由明显不利于老年人的身心健康。
采用融智能感知、检测和提醒为一体的技术手段解决老年人的户外安全问题,已经成为辅助生活(assistive living)领域的研究焦点和智能养老的重要依托。部署在生活环境中的感知设备、嵌入在生活设施中的传感器和穿戴在用户身上的感知单元为实时定位老年人提供了技术支撑,与之配套的判断规则[1-4]可识别出老年人是否位于预先设定的安全区域内。一旦老年人走离安全区域,可通过其随身携带的智能手机发出告警或提醒信息。
上述基于简单判断规则的解决方案[1-4]有着安全区域易于构建和检测算法易于实现等方面的优点,但是实用中这些方案可能存在如下几方面的不足:
(1)大量漏报或误报。就形状而言,现有的安全区域大多是以家为中心、以指定距离为半径的圆形区域。然而,真实生活中,人的活动范围往往是形状各异的不规则区域。因此,太大的区域范围会导致漏报,即受监测者已经走离安全区域但系统尚未检测到;太小的区域范围会引发误报,即受监测者仍处在安全区域内但系统却检测为偏离。
(2)安全区域不可自动更新。现有的安全区域主要采取手工方式构建,如在数字地图上手动框定安全范围,因而不具有自动更新的功能。然而,真实生活中,由于身体机能不断下降,老年人的活动范围会逐渐变小,过去安全的活动范围现在或将来可能变得不再“安全”,因此需要算法具备适应这种变化的能力。
(3)算法可扩展能力弱。不可否认,不同个人的日常活动范围可能存在不同,体现在经常到达的物理位置和走经的道路等方面。若在安全区域的构建和不安全行为的检测中不考虑这种个体差异的话,那么辅助系统将会为地理位置上相近或相同的两个人指定相同的安全活动范围,因而检测结果不是个性化的。
针对存在的上述问题,本文研究并提出基于个人出行轨迹的个性安全区域构建方法,并基于构建的安全区域提出面向越界行为发现的异常轨迹实时检测算法。具体而言,受地理围栏(geofencing)[5]的启发,在深入分析老年人户外移动行为的基础上,本文首先将老年人户外安全活动区域建模为具有不规则多边形形状的地理围栏;然后,基于构建的个性化安全地理围栏,应用GPS 轨迹跟踪技术,研究并提出基于GPS 轨迹的个性化安全地理围栏构建方法;其次,针对不安全越界行为,基于构建的个性化GPS 安全地理围栏,研究并提出异常GPS 轨迹实时检测方法;最后,应用一组真实的GPS 轨迹数据,验证提出的方法,实验结果表明本文提出的方法具有良好的检测性能。
与已有的方法相比,本文提出的基于个性化安全地理围栏的老年人越界行为实时检测方法具有如下优势:
(1)本文将老年人的户外安全活动区域建模为具有不规则多边形形状的地理围栏,充分反映了用户户外活动的实际情况,并体现了用户的个性化特性,与智能辅助服务的个性化要求保持一致。
(2)仅利用智能手机的内嵌GPS 传感器捕获用户的室外移动轨迹数据,不需要用户携带其他任何专用设备,既节约成本,又能够避免因老年人忘记携带专用设备而导致的系统不可用或低使用率。
(3)不安全越界行为的检测基于轨迹偏离程度的评分实现,因此避免了简单使用计算几何领域中点在多边形内部判定算法可能存在的高误报。
2 个性化安全地理围栏
安全地理围栏是不安全越界行为得以实时准确检测的前提和基础,在真实生活中呈现为具有不同形状的物理区域,对应于数学中的不规则多边形(irregular polygon)。本部分首先介绍老年人户外安全地理围栏的建模方法,然后介绍基于GPS 轨迹的安全地理围栏实例化过程。
2.1 安全地理围栏的建模
作为基于位置的服务(location based service,LBS)[6]的一种新应用,地理围栏用于构建虚拟的地理边界。当手机进入或离开构建的地理围栏时,便可自动获取到通知或警告信息,因而可以实现位置社交应用中的自动登记服务。
在老年人辅助应用中,对于任一老年人,若能够在其户外常规活动区域与陌生区域之间找到一条虚拟的地理边界,那么可将这一边界的内部视作安全活动范围。因此,若老年人处在安全范围内时,则认为是安全的;否则,则认为是不全安的,或存在安全隐患的。因此,构建户外安全区域的问题转换为如何构建安全地理围栏的问题。
考虑到不同老年人户外活动的物理范围和区域形状各不相同,对于给定的任一老年人用户,本文首先将其户外活动区域建模为图TG=(V,E),其中V代表该老年人经常到访的物理位置li∈V(1 ≤i≤n)的集合,E代表任意两个位置之间的连接边(li;lj)∈E的集合。
由图1 可以看出,通过有序连接图模型的所有外围边界点,便可形成一个封闭的不规则多边形(图中灰色区域),这一多边形构成了老年人的户外安全活动区域。由前述可知,当老年人位于该安全区域的内部或其边界上时,他(她)是安全的,因为这个区域对他(她)而言是“熟悉的”。这一安全区域的边界就是安全地理围栏(geofencing for safety,GS),形式化地表示为顶点lj的序列GS={lj},j=1,2,…,m,其中顶点lj的来源有三个:
(1)TG的最外围顶点,例如图1 中的顶点l1~l3及l5~l7;
(2)TG的外围边的交点,例如图1 中边(l1;l5)和(l3;l6)的交点I;
(3)道路的转弯处。

Fig.1 Modeling older adult's outdoor movement as graph图1 老年人户外活动区域的图模型
由于不同个人的户外活动情况各不相同,这些差异体现在经常到访的地理位置、走经的道路等方面。因此,基于历史移动行为构建的安全地理围栏GS也各不同,有着显著的个性化特性。
2.2 安全地理围栏的实例化
安全地理围栏GS本质上是分割安全活动范围和陌生区域之间的不规则多边形,由前述三种不同类型的点所确定。实例化安全地理围栏,就是用给定的个人历史移动轨迹确定这三类顶点,以产生地理围栏模型GS的顶点序列。
鉴于手机内嵌GPS 传感器的低成本和易于使用特性,以及GPS 技术在位置跟踪应用中的良好性能,本文提出利用GPS 移动轨迹实例化安全地理围栏。首先定义GPS 轨迹为t={p1,p2,…,pn},其中pi(1 ≤i≤n)代表第i个GPS 数据点。
可用多种不同的方法实现安全地理围栏的实例化,例如轨迹聚类[7-9]等。本文提出区域划分和轨迹映射相结合的安全地理围栏实例化方法,该方法首先将给定数据集涉及的相关区域(region of interest,RoI)划分成一系列大小相等的方格,然后将GPS 轨迹逐条映射到划分后的区域,接着去除区域内部的顶点和边,以最终形成安全地理围栏GS。
2.2.1 相关区域的划分
给定由m条轨迹构成的数据集T={t1,t2,…,tm},假定该数据集中轨迹的经度(longitude)和纬度(latitude)的跨度分别为(Lonmin,Lonmax)和(Latmin,Latmax)。那么,坐标平面上由四个点(Lonmin,Latmin)、(Lonmin,Latmax)、(Lonmax,Latmin)和(Lonmax,Latmax)所确定的区域,就是该数据集的相关区域(RoI),也是给定用户的相关区域(见图2)。
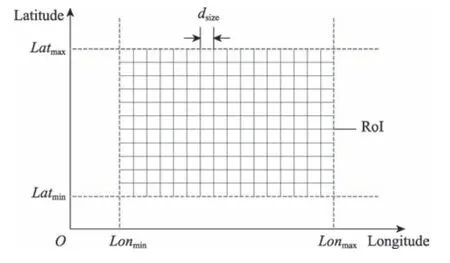
Fig.2 RoI and its partitioning图2 相关区域及其划分
针对确定的相关区域RoI,实例化安全地理围栏的首要任务是划分该区域,以产生等大小(长、宽均为dsize)的cell序列,记作S-RoI(式(1)):

值得注意的是,dsize的实际取值以经验方式确定。通常,较大的dsize对应较粗粒度的划分,计算量小但可能导致较高的漏报率;相反,较小的dsize对应较细粒度的划分,漏报小但计算开销较大。因此,实际处理中需要在计算开销和漏报率之间进行合理折衷,以确定dsize的合理取值。
2.2.2 轨迹到S-RoI的映射
轨迹映射就是基于划分所得的区域S-RoI,依据轨迹中点所在的物理位置,将集合T中的轨迹逐条投射到S-RoI以产生cell序列的过程。
给定一条由10 个GPS 点构成的轨迹t={p1,p2,…,p10},图3 描绘了由t映射到S-RoI 的直观过程。这一映射过程产生的cell 序列为{cell4|5,cell5|4,cell6|4,cell7|3,cell8|4,cell9|4,cell10|10,cell11|5,cell12|6,cell13|5}。
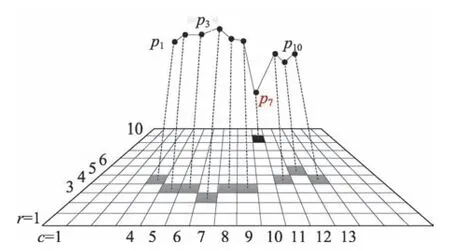
Fig.3 Mapping trajectory into S-RoI图3 轨迹映射到S-ROI
根据前述的轨迹映射方法,基于划分后的区域S-RoI,可将任意给定的轨迹数据集T逐轨迹转换成cell 序列。然而由于人的移动行为的随意性,经过同一条道路的不同轨迹可能有着不完全相同的cell 序列。因此,需要定义支持度Support(cell,|T|)=Number(cell,T)/|T|,以概率形式确定cell 是否位于图模型TG(也即安全地理围栏GS)的边界或顶点上,其中Number(cell,T)代表T中经映射后通过cell 的轨迹数量,|T|代表T中包含的轨迹总数。
此外,由于实际道路可能包含的分叉情况,两个目标位置可能共享同一个起始位置,因此支持度的计算需要进行调整。例如,假定起始位置S、目标位置L1和L2,分叉位置为I,从S到L1(L2)的轨迹条数为|T1|(|T2|),那么从S到分叉点I的轨迹总数为|T1|+|T2|。
需要说明的是,图3 中点p7对应的映射cell10|10不会出现在最终的cell 序列中,这是因为cell10|10与相邻cell(即cell9|4和cell11|5)之间的距离跨度太大。其实,cell10|10对应的原始GPS 点p7极有可能是噪音数据。特别地,将轨迹t的映射轨迹记作tM。
概括而言,前述轨迹映射机制一方面消除了人的移动行为的随机性可能导致的轨迹差异,另一方面对原始轨迹做了稀疏化处理且消除了可能包含的噪音数据。同时,它还能够发现物理道路的交叉点,例如图1 中的点I。
图4 给出了两条轨迹映射到S-RoI 的例子,从中可以看出,两条不完全相同的原始GPS 轨迹(红色和蓝色)经映射后对应的tM是相同的(浅蓝色圆点序列)。

Fig.4 Example of mapping two GPS trajectories to S-RoI图4 两条GPS 轨迹映射到同一个S-RoI的示例
2.2.3 内部顶点和边的检测与移除
所谓内部顶点和边,是指相对于安全地理围栏GS而言,那些处在图模型TG内部的顶点和边。由于安全地理围栏仅仅是一个区分安全和不安全区域的边界,而前述轨迹映射处理结果中必然包括这一边界内部的点或顶点,如图1 中的顶点l4及边{l1;l4}、{l4;l3}、{l6;l4}和{l1;I}、{l6;I}。
通过观察轨迹的映射过程可以看出,无论顶点还是边,在映射后的轨迹tM中均以cell形式出现。因此移除顶点和边的任务转换为移除安全地理围栏GS内部cell的过程。而移除cell的前提是要准确判定一个cell是否为内部cell。
将cell 视作点(Point)、安全地理围栏GS视作多边形(polygon),内部cell 的查找问题可转换为多边形内部点的判定问题,即计算几何研究领域的PIP 问题(point in polygon)。本文采用改进光线投射(ray casting)算法实现PIP 问题的求解,具体过程见3.1 节算法1。
总之,经过前述个性化安全地理围栏构建的一系列处理,实现了给定轨迹数据集T对应的安全地理围栏GS的构建。接下来,将基于这一安全地理围栏GS,提出并介绍面向老年人越界行为发现的异常轨迹实时检测算法。
3 面向越界发现的异常轨迹检测
轨迹异常检测是一个热点研究问题,在不同的研究问题中有着不同的定义。本文的目的在于发现老年人可能存在的跨越安全边界的行为(简称为越界行为),因此将那些“显著”跨越安全地理围栏GS的轨迹定义为异常轨迹。本部分首先给出多边形内部点的判定算法,然后说明如何量化评价一条轨迹“显著”跨越了给定的安全地理围栏,最后给出完整的异常轨迹实时检测算法。
3.1 点在多边形内部的判定算法
判断一个给定的点是否位于已知多边形的内部,是计算几何领域的研究问题,即PIP 问题。现有研究已经提出了多种用于求解此类问题的算法[10-13],其中光线投射(ray casting)和环绕数(winding number)是最为常见的两种算法,它们具有类似的效果[14]。特别地,针对一般光线投射算法不能处理待测点引出的射线与顶点相交或与多变形边重合等特殊情形的PIP 问题,Galetzka 和Glauner[15]于2017 年提出了改进的光线投射算法。
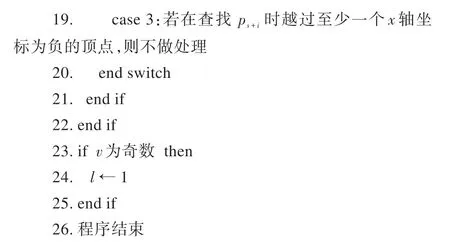
为便于理解,该算法将位于同一2D 平面上的待测点q和多边形L={l1,l2,…,ln}预先做了平移处理,在确保q和L相对位置不变的前提下,使q位于坐标原点(0,0)。完整的算法描述见算法1。
图5 用1 个位于原点的待测点q和包含6 个顶点的多边形L={l1,l2,…,l6}示例了算法1 的工作过程。需要说明的是,由于点q位于坐标原点,因此由其引出的射线与x轴重合。

Fig.5 Example of algorithm 1图5 算法1 的示例
由图5 可以看出,依据算法第2~5 行,点q不在L的顶点或边上,因此按序查找不在x轴上的第一个点l1,记为ls。根据算法第12~22 行,找到的不在x轴上的点为ls+(i=1)=l2,在查找l2的过程中没有越过任何顶点且没有与x轴正半轴相交,因此不进行处理;以ls=l2作为起点进入下一轮循环。由于顶点ls+(i=1)=l3在x轴上,i增1;继续查找下一个顶点ls+(i=2)=l4,其在x轴上,i增1;继续查找下一个顶点ls+(i=3)=l5,其不在x轴上。从顶点l2到l5越过了位于x轴上的顶点l3和l4,但线段{l2;l5}不与x轴相交,交点个数不加1。此时,ls=l5,以它作为开始,找到的下一顶点为l6,因l6在x轴上且其为最后一个顶点,所以下一个顶点为l1;由于从l5到l1越过了位于x轴上为正的点l6且线段{l5;l1}与x轴相交,依据算法第18 行,交点个数加1。至此,算法遍历了L上的所有点且交点个数为奇数(值为1),依据算法第23~25 行,判定点q在L的内部。
算法1Modified-RC——改进的Ray Casting算法[10]

若将2.2.3 小节的cell 看作点q,构建的安全地理围栏GS看作L,便可实现GS内部顶点和边的检测与移除。此外,算法1 也是异常轨迹检测算法的核心,3.3 节将完整介绍面向越界行为发现的异常轨迹检测算法。
3.2 轨迹跨越程度的量化评价
不能将老年人是否位于安全区域内的问题简单等同于计算几何领域点在多边形内部的判定问题,在实时检测老年人是否处在安全地理围栏内的智能辅助应用中,受监测的老年人代表着要判定的点,而构建的个性化安全地理围栏是多边形。显而易见,由于人的移动性,要判定的点的位置可能一直处在变化过程中。
假定受监测的老年人在tk时刻走离了构建的安全区域,导致出现了跨越安全地理围栏(即从多边形的内部Inter 到外部Outer)的现象,经过m个时间单位后老年人所在的位置可能为:
(1)轨迹偏离方向与边呈垂直或近似垂直关系,且距离越来越远(图6 上);
(2)轨迹偏离方向与边平行或近似平行,前进方向不变且垂直距离较短(图6 中);
(3)轨迹偏离方向与边平行或近似平行,前进方向反复变化且垂直距离较短(图6 下)。
如图6 所示,若将首个偏离点tk和最后一个偏离点tk+m之间的物理距离记为Dist(tk,tk+m),将轨迹段{tk,tk+1,…,tk+m}在跨越经过的边(li;lj)上的投影距离之和记为DistPro(tk,tk+m),定义投影距离与物理距离之比为rDist(见式(2)):


Fig.6 Boundary transgression and its quantitative evaluation图6 跨越度及量化评分
偏离的轨迹越是与跨越的边呈垂直关系,rDist的值就越小,意味着偏离的趋势越明显;偏离的轨迹越是与跨越的边呈平等关系,rDist的值就越大(→1),意味着偏离的趋势越不明显。因此,rDist值度量了轨迹的偏离趋势,距离Dist(tk,tk+m)度量了偏离程度,综合两者可得出如下面向越界行为发现的异常轨迹跨越度量化评价规则:
一条显著跨越安全地理围栏的轨迹拥有显著的偏离趋势和偏离程度,即同时获得较小的rDist值和较大的Dist(tk,tk+m)值。
至此,本文获得了轨迹跨越程度的量化评价指标,这一指标也作为3.2 节轨迹的评分指标(score)。在2.1 节给出的点在多边形内部检测结果的基础上,通过计算跨越度的量化指标,可合理判定老年人是否已经走离安全地理围栏。
3.3 异常轨迹实时检测算法
考虑到老年人室外检测服务的实时性要求,本部分在综合点在多边形内部的判定算法和轨迹跨越度量化指标的基础上,提出面向老年人越界行为发现的异常轨迹实时检测算法(见算法2)。
算法2异常轨迹实时检测算法(TrajDect)

假定t是一条正在输入中的轨迹(对应于正在行进中的人),对t的每个新到达的点pi,算法2 调用算法1(第2 行)判断该点是否位于多边形内部。若为否(第3 行),根据式(2)算法第4、5 行分别计算偏离趋势指标rDist和偏离程度指标Dist(tk,tk+m),且若rDist小于预定义的阈值rDist-THR而Dist(tk,tk+m)大于预定义的阈值rDist-THR时,判定轨迹t为异常轨迹,即代表跨越安全地理围栏的轨迹。
4 实验及评价
使用一组真实环境中收集的GPS 轨迹数据,本部分验证本文提出的异常轨迹实时检测算法和基于智能手机平台的原型检测系统,包括算法的检测性能和原型系统的实时响应能力。
4.1 实验设计
本文实验数据收集自8 位数据收集志愿者,每位志愿者产生一个GPS 数据集,每个数据集大约由200~450 条GPS 轨迹构成,每条轨迹持续0.5~4.0 h,距离跨度为0.75~3.00 km。需要说明的是,每个数据集中的前100 条轨迹用于构建安全地理围栏GS,因此这些条轨迹不包含在测试数据集中。考虑到老年人在数据收集过程中可能存在的不安全或不方便,本文数据收集过程中邀请的8 位志愿者为年龄在20~30 岁之间的年轻人,其中本科生5 人、研究生3 人。数据收集所在的物理位置为学校所在的本部校区和新校区,其中本科生数据收集志愿者在新校区,研究生数据收集志愿者在本部校区,数据收集的时间跨度在1.5 个月至半年之间。每个数据集对应的安全地理围栏因数据收集志愿者活动范围的不同而不同,安全地理围栏的顶点代表经常到访的物理位置(如图书馆、教学楼、餐厅楼等)。
为量化考察实时检测算法在异常轨迹检测中的性能,在数据收集过程中已经对每条轨迹给予了标注(label),获得了每条轨迹的真实情况(ground truth)。具体而言,首先,每位数据收集志愿者在收集过程中独自对每条轨迹是否越界进行记录。然后,邀请3 名数据标记志愿者通过可视化方式(画出每一条轨迹)对每条轨迹进行手工标记;若3 名数据标记志愿者中有至少2 名的手工标记结果与数据收集志愿者记录的结果一致,则数据收集志愿者记录的结果为该条数据的真实情况;否则,邀请数据收集志愿者一同参与,重启对该条轨迹的手工标记过程。重新标记过程要么修正数据收集时的记录,要么修正手工标记结果,但要求在重新标记过程中各参与人员不得交换意见,以最大程度确保标记结果的客观性。需要注意的是,数据收集志愿者和数据标记志愿者不能为同一个(批)人。
表1 给出了本文实验数据的概况,包括每个数据集包含的GPS 轨迹数、异常轨迹数(跨越安全地理围栏的轨迹的数量)、每个数据集中包含的异常轨迹占总轨迹的比重、安全地理围栏GS的顶点数等几个方面。
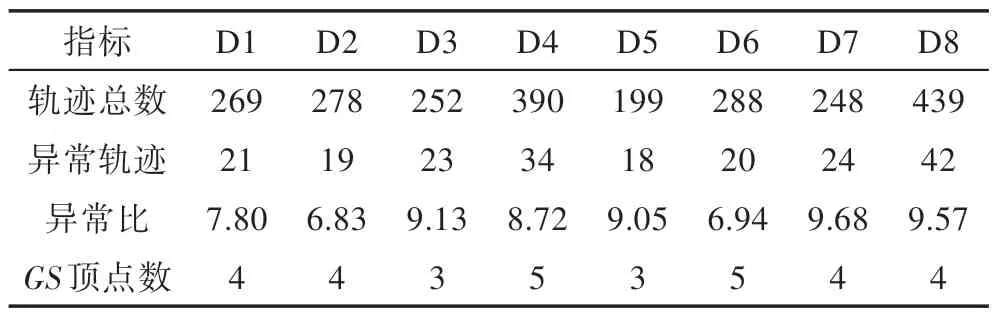
Table 1 Overview of used experimental data表1 所用实验数据的概况
实验的评价指标主要有两个方面:一是异常轨迹实时检测算法的性能;二是基于智能手机平台的原型检测系统的响应能力。具体而言,对于算法的检测性能,本文使用检测率dr(detection rate)和误报率flr(false positive rate)作为算法性能的评价指标。其中,TP、FP、TN和FN的具体含义由表2 所示混淆矩阵定义。

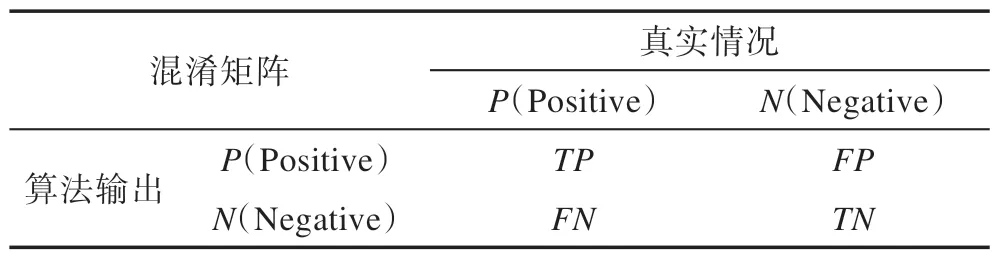
Table 2 Confusion matrix表2 混淆矩阵
一般而言,一个好的检测算法应该同时获得高的检测率dr和低的误报率flr。若将flr作为横坐标而dr作为纵坐标时,可画出ROC 曲线,该曲线下的面积AUC 值综合反映了算法的检测能力。因此,AUC 值是本文实验的重要度量指标。
关于原型系统的实时响应能力,就是当一条轨迹被检测为异常轨迹时,系统发送提醒信息的时延情况。
实时检测算法的实验验证平台为Intel Xeon CPU E5-2620、16 GB 内存,搭载64 位的Windows 10操作系统;移动验证平台为Coolpad 7268、8 GB 内存,搭载Android 4.1.2 操作系统。
4.2 实验结果
本文实验结果包括针对安全地理围栏、异常轨迹和ROC 曲线的可视化结果,针对异常轨迹评价的AUC 值及原型系统的实现性能等几方面。
4.2.1 可视化结果

Fig.7 Visual result of dataset D6图7 数据集D6 检测结果的可视化
图7 给出了数据集D6 的安全地理围栏,从中可以看出,构建的安全地理围栏在经常到访的区域与较少到达的区域之间建立了清晰的划分边界(图中红框围住的cell 序列)。按照2.1 节关于安全地理围栏的定义,图中l2和l5为内部顶点,相应的边{l2;l5}为内部边。然而,顶点l2并非位于某个原始划分得到的cell,而是修正后的位置(l2位于两个cell的对角上,因此其坐标为两个对角相邻cell的平均值),因此l2依旧保留。这样一来,图7 所示的安全地理围栏为GS={l1,l2,l3,l4,l6},它不含内部顶点l5和内部边{l2;l5}。
图7 中标记为t1、t2和t3的异常轨迹,轨迹旁边的箭头代表前进的方向,很显然它们显著偏离了构建的安全地理围栏。例如,t1的rDist值为0.132 9、t2的rDist值为0.075 2,两者的Dist(tk,tk+m)值均为30 m。注意,此处每个格子的长、宽取值为20 m,即dsize=20。Dist(tk,tk+m)=30 意味着当老年人走离构建的安全地理围栏1.5 格(30 m)时系统给予提醒。
不同的是,图7 中标记为t2的轨迹为正常轨迹,它处在构建的安全地理围栏边界上。类似地,任何一条位于顶点l2和l5之间的轨迹也是正常轨迹。
当约定一条轨迹跨越边界30 m,即Dist(tk,tk+m)=30 时判定为异常轨迹,此时异常轨迹的评分可由其rDist的取值确定。注意,若一条轨迹的评分为0,则认定其为非跨越边界的正常轨迹。图8 给出了本文8个数据集的ROC 曲线。

Fig.8 ROC curves for all 8 datasets图8 全部8 个数据集的ROC 曲线
由图8 可以看出,各数据均获得了很好的检测性能。在误报率大于5%的情况下,所有数据集获得了接近100%的检测率。特别是,数据集D4 获得的检测性能最好,相对而言数据集D5 的检测性能较弱。经对比原始数据得知,数据集D4 对应的用户有着比较规律性的户外移动行为,产生的轨迹较为规整,轨迹在边界上“来回绕动”的非确定性现象较少;相反,数据集D5 对应的用户其移动轨迹较为散乱,轨迹的扰动现象使得其异常评分rDist有所增加。
4.2.2 量化结果
表3 给出了dsize取不同值时的AUC 值,从中可以看出,本文方法在绝大部分数据集上获得的AUC 值不低于0.90,表明该方法在实时检测越界行为具有良好的性能。

Table 3 AUC values for all 8 datasets表3 全部8 个数据集的AUC 值
特别值得一提的是,dsize=20 m 时,各数据集获得的AUC 值达到最大。这是因为,对于以步行方式获得的户外移动轨迹,dsize的取值太小容易产生误报,而太大容易引发漏报。因此,实用中需要根据数据集确定最优的划分尺寸dsize。
4.2.3 原型系统的响应时间

Fig.9 Smartphone-based prototype system图9 基于手机平台的原型系统
图9 给出了基于智能手机平台开发的越界行为原型检测系统,系统运行时的界面由三部分构成:
(1)上部:受监测人当前所在的绝对物理位置,即当前点的经、纬度值。
(2)中部:构建的安全地理围栏及当前点在该地理围栏中的位置。
(3)下部:算法判定受监测人是否位于地理围栏的内部,若值为Inter 则位于围栏内部,若值为Outer则位于围栏外部。
原型系统的主体在智能手机平台上实现,选用的数据库系统SQLite Release 3.28.0。为减轻手机平台的运行负荷,安全地理围栏的构建过程由台式计算机实现并通过离线方式移植到手机平台,目前尚未在手机端实现安全地理围栏的自动更新功能。
运行在手机端的轨迹实时检测算法对每个输入的GPS 点进行检测处理,具体包括两个主要步骤:一是运用2.2.2 小节描述的轨迹映射规则,判定输入点是否为噪音点,注意:此阶段只做轨迹噪音检测和消除,不做轨迹映射处理;二是将非噪音新输入点连接到已有的轨迹以形成新的轨迹,并判定最新轨迹是否为异常轨迹。系统从GPS 点的获取到判定结果的输出时间在15~22 s 之间,依轨迹中包括的点的数量不同而不同。系统的时间响应基本符合实时检测和提醒的使用要求。
5 结束语
本文研究了基于移动轨迹的个性化户外安全地理围栏构建,在此基础上研究并提出了面向越界行为发现的异常轨迹实时检测算法。首先,建模个人的户外安全活动范围为不规则多边形区域,进而形式化表示安全地理围栏为该多边形顶点的有序序列;然后,应用个人的历史GPS 轨迹实例化构建的安全地理围栏,产生个性化的安全活动范围;其次,基于点在多边形内部的判定算法,通过融入跨越度这一异常轨迹量化评价指标,提出了面向越界行为发现的异常轨迹实时检测算法,实验结果表明本文方法具有良好的检测性能,各测试数据集获得的AUC值不低于0.995。
未来将从如下几方面进一步提升本文的工作:
(1)大量收集实验数据,进一步验证本文提出的方法和算法的性能,发现潜在的问题并加以改进和优化。
(2)完善、部署原型系统并将其投入到真实服务应用中,从系统的响应、能耗及稳定性方面综合评价系统。
(3)探究与越界行为实时检测相关或类似的老年人智能辅助问题,拓展研究的涉及面,以从技术的角度全面辅助老年人的户外活动安全。
猜你喜欢
中学生数理化(高中版.高考数学)(2022年4期)2022-05-25
今日农业(2021年2期)2021-11-27
中等数学(2021年9期)2021-11-22
读友·少年文学(清雅版)(2020年4期)2020-08-24
读友·少年文学(清雅版)(2020年3期)2020-07-24
红蜻蜓(2020年12期)2020-06-20
好孩子画报(2019年8期)2019-09-19
小学生学习指导(中年级)(2018年9期)2018-09-07
发明与创新·大科技(2018年2期)2018-03-17
中学生数理化·高一版(2009年6期)2009-08-31