面向农机自动驾驶的5G/大数据技术应用展望
2020-06-10 01:00诺基亚通信系统技术北京有限公司北京000沈阳航空航天大学辽宁沈阳036
邮电设计技术 2020年5期
秦 宇,周 宇,赵 亮(.诺基亚通信系统技术(北京)有限公司,北京 000;.沈阳航空航天大学,辽宁沈阳 036)
1 概述
目前全球农机的发展趋势是具有自动驾驶系统的大型化、精准化农机,要求农机通过卫星和基站导航等手段具有一定的自动驾驶功能,要求农机操作人员具备更丰富的农机知识储备和更专业的农机操作技术。我国是农机大国,但在自动驾驶农机系统生产配套和操作人员知识体系上还相对落后。
国务院《全国农业现代化规划(2016—2020 年)》计划我国农作物耕种收的综合机械化率由2015 年的63%提高到2020 年的70%,并加快智能装备的推广应用,促进农业机械化提档升级,创建500个全程机械化示范县[1]。我国5G建设正在大规模展开,截至2019年底全国共建成5G 基站超13 万个,2020 年预计建成5G基站超过60~80 万个,几年内将实现全国范围的5G 信号的广域和密集覆盖。
利用5G 技术支撑的自动化驾驶农机可以通过实现农机驾驶的精确定位、远程的大数据回传、AI 智能分析等促进农机智能化发展,另外结合5G回传农机的高清视频、设备运行参数等,采用大数据分析可以实现从农机保养、农作物生产、收货等全流程化、全生命周期的科学管理,促进农业机械化发展的同时,降低专业农机操作人员的需求数量,加快我国农业现代化的发展步伐,缩小与发达国家技术水平的差距。
为了深入探讨5G 和大数据对自动驾驶农机的推动作用,将结合5G 和大数据,对农机自动驾驶技术的发展趋势进行阐述。
2 自动驾驶农机的发展现状
自动驾驶农机是以定位系统为核心技术,通过车载的转向控制装置和导航控制算法控制农机沿预定作业路线行走的农业机械。自动驾驶的智能化农业机械装备已成为当今世界农业装备发展的新潮流,是近几年来国际上农业科学研究的热点之一[2]。
欧美等发达国家的农机自动驾驶技术是随着90年代GPS 导航技术兴起的,已经历二三十年的发展历程,其主要技术是借助RTK(Real Time Kinematic)基站完成自动驾驶农机的定位和导航。RTK 是一种载波相位差分技术,RTK 基站通过数据通信链实时地把载波相位观测值和已知坐标送给附近工作的农机,农机根据接收到基准站和卫星的载波信号实时差分消除部分误差来提高定位精度[3]。
农机自动驾驶系统主要分为RTK 基站系统和农机车载系统2个部分,涉及RTK基站接收机、后台运算服务器、车载接收机、方向传感器、控制器等[4],单点的RTK系统拓扑如图1所示。
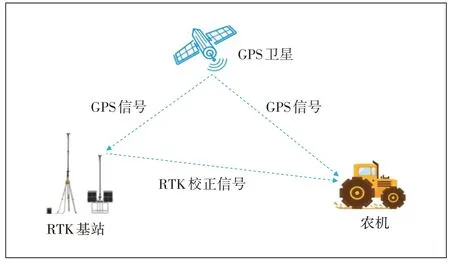
图1 RTK自动导航拓扑图
目前自动驾驶农机在美国、德国、法国、丹麦、加拿大等国家发展比较成熟,有很多RTK 基站系统的运营公司,但收费较高,为了节约费用,在美国,一些农场主通过自行建设RTK基站,搭建自动导航平台[5]。
我国农机自动驾驶导航系统的市场在2000 年以后开始逐步发展,商业的农机自动驾驶系统由国内科研院所开始牵头研制并逐步市场化,主要功能为通过卫星定位实现农机直线作业路线的自动跟踪行走[6],典型应用场景为新疆地区棉花覆膜播种、东北地区起垄、内蒙地区马铃薯播种等。我国农机自动驾驶和导航发展总体相对比较落后,主要原因是种植规模化低、导航RTK 基站较少且价格较高等。未来随着5G的深入部署,利用5G 导航、5G 大数据回传等技术优势,可以有效推动农机自动驾驶市场的发展。
3 农机自动驾驶中的5G关键技术及平台设计
5G 技术在农机自动驾驶中的应用主要包括精确定位、视频大数据回传等。
3.1 5G精确定位技术
由于传统基于RTK 基站的农机定位系统在我国的发展落后于欧美发达国家,5G的精确定位技术将弥补这一不足。5G 的精确定位技术是5G 发展过程中的一项增强技术,依托大规模天线、波束赋形和毫米波等方法综合实现,未来在5G基站密度和覆盖足够良好的情况下可以达到或超过RTK基站系统的定位精度。
3GPP 早在R13、R14 版中就已开展针对3G 和4G室内定位技术增强的研究,增强了RAT 定位方法,完善了非RAT的室内定位方法等[7]。由于没有对定位至关重要的同步技术深入研究和标准化,4G定位精度不高。3GPP R16 版本开始对5G 定位进行了定义,并将在3GPP R17版本中进行细化,在2020年3季度开始进行标准的完善,涵盖内容包括:工业园区定位、物联网/车联网定位、3D 定位、厘米级别的定位、终端相位定位[8]。关于定位的精度,欧盟地平线计划在5G 按步骤实现从30 cm、10 cm、1 cm的定位精度[9],如表1所示。
具体方法是在大规模天线、波束赋形、毫米波、卫星导航等多种技术的基础上,结合更先进的数学算法进行精确定位。
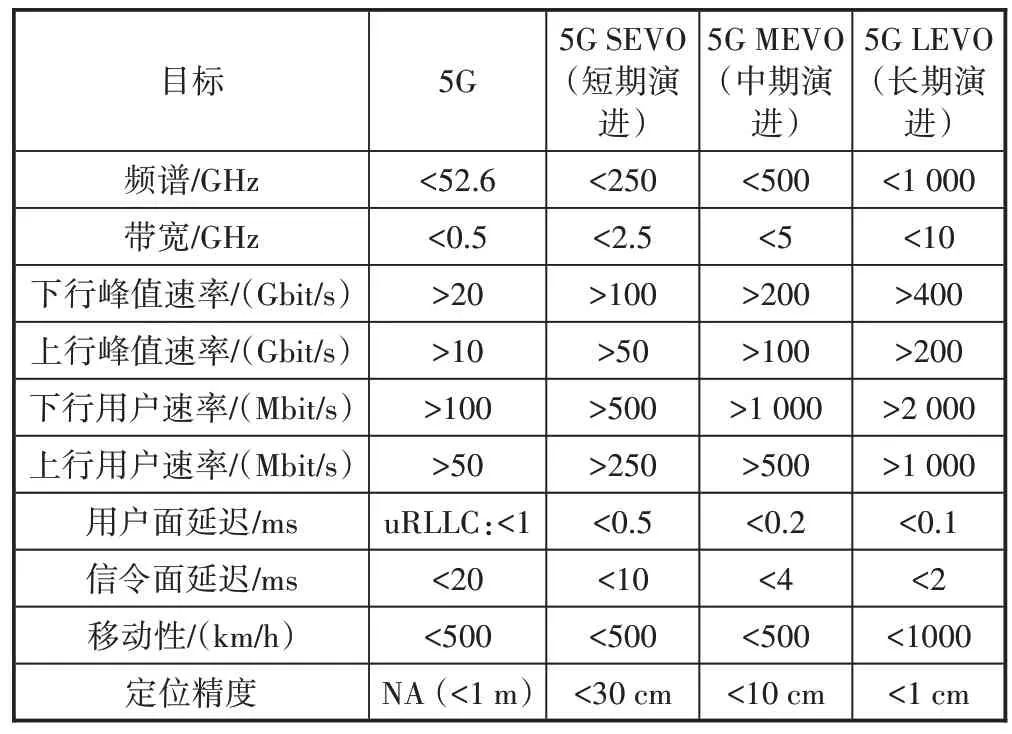
表1 5G各个阶段的指标要求
首先,大规模天线可以实现基站和终端之间的多波束密集传输,波束越密集则天线系统可识别的收发信号角度就越精确,终端根据这些角度可以精确计算自己的相对位置,在4G 也有类似的定位技术,但是由于天线数量少,定位精度只有几十米。其次,采用波束赋形技术可以提高波束指向精度,继续提高角度识别精度。而毫米波技术则是因为高频率指向性好,同样也可以提高波束指向的精度,同时由于波长更短,同等大小的天面下可以安装更多的天线,继续提高波束赋形的量级。另外卫星导航定位可以进行前期粗略定位,并辅助完成后续定位纠偏等。
在具体的定位数学算法实现上,常用的无线定位算法包括到达时间(TOA——Time of Arrival)、到达时间差(TDOA——Time Difference of Arrival)、往返到达时间(RTTOA——Round-Trip Time of Arrival)、到达角(AOA——Angle of Arrival)等[10],现实中的实现技术是多种技术的结合。
如图2 所示,假定在2 维的直射和反射传播条件下,(xb,yb),(xt,yt),(xi,yi)分别表示基站、终端和反射体的位置,(xb,yb)已知,(xt,yt),(xi,yi)未知,利用已知基站位置,根据公式(1)~(6)和可观测值Di、α2i、β2i,可对未知的5G终端位置进行估计。其中α2i和β2i分别为从5G基站到5G终端的第i条路径的到达角和离开角,Di为距离差。由于路径衰减、角度计算的误差等定位结果还不够精确,利用折射体并结合最小二乘法等算法多次运算可以比较精确的计算终端的具体位置[11]

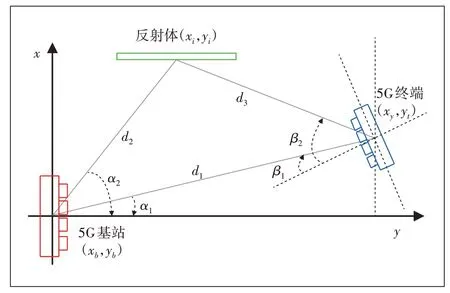
图2 借助反射体的TDOA/AOA定位算法

3.2 大带宽、低延迟技术
在自动驾驶农机具有精确定位功能后,还需要具有障碍避让、农作物成熟度识别、病害识别等功能,这些功能在传统卫星导航的传统自动驾驶中还没有应用或由需要车载驾驶员辅助车载系统完成,并非完全的无人驾驶,而5G由于具备大带宽、低延迟的优势,非常适合在农机自动驾驶中应用。
车载的高清摄像头可实现农作物高分辨率拍照、摄像,通过5G 网络快速地回传到后台农业数据服务器,通过基于大数据和AI 的图像识别和视频识别技术,快速地进行自动驾驶线路辅助纠正、农作物成熟度分析、病虫害分析等。细节分析时需要超高的分辨率,而超高清(Ultra HD)是指国际电信联盟ITU-T 定义“4K 分辨率(3 840×2 160 像素)”的正式名称,实现了高分辨率、高帧率、高色深、宽色域、高动态范围、三维声共6 个维度技术的全面提升。采用4K 的高清摄像头[12],理论上如果不压缩需要12 Gbit/s 的速率进行传输,按接近极限的压缩算法,也需要50 Mbit/s 以上的速率,如果有多个摄像头同时回传数据,4G LTE 网络是无法满足需求的,而当前非独立组网(NSA)的5G在100 MHz带宽时的最高下载速度约在1.25 Gbit/s,后续独立组网(SA)的5G 架构可以提供更大规模的连接和更低的延迟,其切片化的服务能力可以有效降低延迟,非常适合农机自动驾驶的各种应用。例如在自动农机果树采摘过程中需要对大量图像进行实时处理,以获得果实或者果树的位置坐标,特别是对成熟果实的识别,在进行定位时采摘农机需要对成熟度较高的果实进行优先采摘,因此还需要根据颜色特征对图像进行处理,最后根据对成熟果实图像的位置识别实现自主定位[13]。这些占用高带宽且需要接近实时的业务处理工作,最适合利用5G网络进行连接。
3.3 自动驾驶平台
除了具备精确定位、大数据回传功能的农机设备,还需要有后台数据平台和支撑模块,共同构成一个整体的自动驾驶平台。5G 可以为农机大数据在网络侧的传输、汇集、分析等打通网络层通道,通过联通车辆、驾驶员、农场主、农机管理人员、农机生产厂家、5G 运营商及设备厂家、专业的农业大数据分析企业、农机和生产的政府相关管理部门、科研单位等搭建农机大数据平台,并完成相关数据挖掘和应用工作。图3为基于5G网络搭建的农机计算及大数据平台构架。
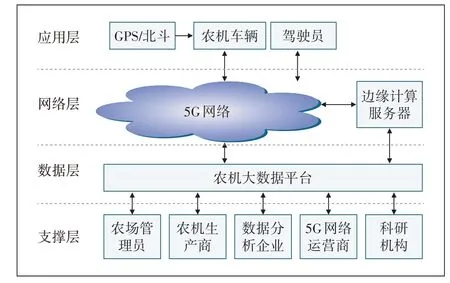
图3 基于5G网络搭建的农机边缘计算及大数据平台构架
a)应用层:实现农机自动驾驶功能。应用层包括各种农机车辆、农机驾驶员、GPS/北斗定位平台。农机实现功能包括各种播种、收割、装载、翻整等,1 台或多台车辆配备少量现场驾驶员,车辆均配备GPS/北斗导航系统以提供定位数据,配备5G收发单元完成数据传输,其他传感、高清摄像等单元根据实际业务需求进行配置。
b)网络层:实现5G 网络承载和提供移动边缘计算服务。主要包括5G无线承载、传输以及移动边缘计算设备(MEC),其中移动边缘服务器根据网络规模及应用层延迟要求等进行配置及地址位置规划。
c)数据层:对5G 网络采集的自动驾驶农机各种数据进行存储、融合、转发,实现对数据的处理利用,同时根据支撑层用户的不同需求进行接口和数据匹配。例如可将农机内部的设备运行日志回传给农机厂家进行远程监测和维护,将5G 收发模块的速率、延迟、抖动等指标回传给5G网络运营商等。
d)支撑层:对数据层获取的各种现场数据进行分类支撑。支撑层可以包括农场管理人员、生厂商维护部门、专业的大数据分析挖掘公司、提供5G 网络的运营商和设备商、具有创新科研能力的研发机构等。数据层和支撑层通过大量的数据交换、分析和处理,实现了农机大数据商业价值的分类、分层挖掘,改进农机行业作业方式,增加经济和社会效益。
4 5G/大数据与农机自动驾驶社会效益及展望
4.1 加持5G的大数据平台对农机发展的社会效益
当前农业物联网业务平台都是异构化、垂直化和碎片化的,使企业之间的数据共享和服务协同变得非常困难,形成了诸多“信息孤岛”[14]。5G可以为农机大数据在网络侧的传输、汇集、创新等创造了条件,通过联通车辆、驾驶员、农场主、农机管理人员、农机生产厂家、5G 运营商及设备厂家、专业的农业大数据分析企业、农机和生产的政府相关管理部门、科研单位等搭建农机大数据平台,完成相关挖掘和应用。
a)提高经济效益。首先可以降农机低维护费用,通过5G回传数据到大数据服务器以后,农机运行状态信息可以通过接口回传给厂家集中处理,通过专业的检查及时确认农机是否需要进行保养或维修等,节省传统的现场维修保养费用。再则可以降低农机驾驶员成本,传统农机对农机驾驶员尤其是富有经验的驾驶员需求很大,通过5G 远程驾驶,可以对多台农机进行监测和操控。随着摄像单元、数据采集装置、5G 收发终端模块价格的不断降低,5G 支撑下的无人驾驶农机作业,可有效降低支出,提高经济效益。
b)具有社会效益。促进精准农业发展,通过地面5G 网络高速率、低延迟的数据传输,结合空中GPS/北斗卫星定位辅助,实现空天一体化,可以加快我国精准农业的发展,促进农业现代化升级,对实现我国农业的可持续发展起到良好的示范和带动作用,具有明显的社会效益。
c)增加环保效益。自动驾驶农机,需要很少甚至没有现场人员,减少了对驾驶员的潜在伤害,例如现场高噪声伤害、粉尘伤害、喷洒化学农药的伤害、恶劣天气造成潜在雷电、滑坡、洪水伤害等。另外驾驶舱的缩减和取消,将减化农机结构,减轻质量,降低碳排放。
4.2 基于5G大数据的自动驾驶农机应用展望
目前道路自动驾驶,面临着各种路况识别、高速下车辆控制等诸多技术瓶颈,并且我国的复杂路况还对道路自动驾驶技术提出了更高要求[15],而基于5G的农机自动驾驶却拥有诸多优势,这是由于农机的驾驶环境相对道路车辆要简单的多:
a)农机作业时驾驶速度低,只是道路车辆的几分之一。国外一些公司推出的自动驾驶农机的重要参数之一是系统支持的最低行驶速度,如美国约翰迪尔ATU 自动导航系统支持的最低行驶速度是0.5 km/h,低于一般系统1.6 km/h的指标[16]。
b)农机作业时,区域内的车辆、人员密度非常低。
c)农机作业时基本不涉及信号灯问题。因此农机自动驾驶应用特别适合与5G技术结合,先期进行一些创新性的突破,在农机行业大展拳脚,并可以为后续道路上的自动驾驶提供大量经验。
可以畅想,基于5G 回传高清的视频流数据、各种机械传感数据,通过大数据平台对高清视频后台自动分析,实现精准的农机自动操作;基于红外视频数据大数据处理,实现良好的夜间操作,规避和牲畜、人员、野生动物的碰撞;基于大数据平台的作物杂草数据库,实现精准的杂草和秸秆粉碎;基于实时压力检测,精准调节翻耕深度及旋耕转速,控制胎压改变对土壤的压痕;基于气象精准预报,实现远程自动化作物抢收等。在5G 及大数据加持下的农机自动驾驶应用将给农业产业带来惊喜。
5 结束语
5G 及大数据技术应用于自动农机驾驶,给我国加速农业现代化带来了机遇和挑战。带来的机遇如下。
a)农机无人驾驶的要求相对道路驾驶要求较低,适宜优先发展。
b)我国的农业模式和土地分配方式不适合RTK类导航基站建设,更适合建设以运营商主导的导航网络。
c)我国正着手大力建设5G 网络,相信可以较快地实现广域覆盖。
面临的挑战如下。
a)3GPP 的5G 标准化还需要一段路要走,3GPP R17 RAN4计划2022年第1季度全部制定完成[17]。
b)毫米波相关的频段分配等还待颁布,且颁布后需要产业链逐步成熟。
c)5G 频率更高,尤其到毫米波段,雨衰、氧衰等带来的影响需要克服。
总之,通过5G 和大数据对农机的加持,可以实现较好的自动农机驾驶,加速我国在农机设备和技术上对发达国家的追赶和超越。在5G发展的前期,农机自动驾驶可以实现率先突破,实现自动驾驶的产业突破和行业大数据的应用经验积累,同时运营商和设备提供商还可以拓展相关ICT市场,实现产业共赢。
猜你喜欢
四川农业与农机(2022年4期)2022-08-31
今日农业(2021年4期)2021-11-27
学生天地(2020年5期)2020-08-25
中国化肥信息(2019年5期)2019-06-25
电子制作(2017年8期)2017-06-05
探索科学(2017年4期)2017-05-04
小天使·一年级语数英综合(2017年3期)2017-04-25
莫愁(2017年9期)2017-04-07
汽车博览(2016年9期)2016-10-18
中国交通信息化(2016年8期)2016-06-06