基于智能视频技术的车内安全监控系统探究
2020-06-10 09:37徐明泽
科学技术创新 2020年9期
徐明泽
(东北林业大学交通学院,黑龙江 哈尔滨150040)
1 概述
目前,国外发达国家的智能监控系统的开发应用领域,主要在交通控制系统、道路信号系统以及公共信息服务等环节[1];未来的智能交通监控系统可能以交通动态仿真、交通运营系统为核心,利用无人驾驶中的信息感知、信息反馈等技术,在建立多领域合作的基础上,实现智能交通监控系统在城市中的发展应用,并以城市为中心向周边辐射发展以实现智能交通监控系统的普及[2];作为智能交通系统的组成部分,车内安全监控系统也将呈现图像识别高清化、智能化、集成化、网络化、应用细分化的趋势[3]。
2 车内安全监控系统的功能及方案设计
2.1 系统功能
本系统应用于网约车与出租车的路径定位、驾驶员行为监测、驾驶员或乘客危险状况报警等功能,具体包括如下几个方面:a.车内视频监控:实时监测驾驶员及乘客的状态,可识别驾驶员或乘客的危险动作并触发报警系统,相关信息及时传输到监控系统平台以便迅速采取应对措施。b.车辆定位:是系统的基础功能,可实现车辆运行轨迹跟踪、实时定位等。c.紧急报警:在紧急情况下,一键触发报警,报警信息自动上传监控中心。d.网络通信:支持丰富的网络协议,可通过网络发送控制命令、传输图片或设置参数等。e.危害行为警告:对于识别的危害行为发出警告蜂鸣,起到震慑作用。
2.2 系统方案设计
系统组成方案如图1 所示。车载前端包含车载硬盘录像机(简称车载DVR)、车载专用摄像机、车载电子显示屏、语音对讲机、车载存储盒及配套的线缆等。车载DVR 内置无线网络通讯模块、GPS 及北斗定位模块,利用5G 通讯网络连接到后台移动视频管理服务器。利用移动视频监控管理平台能够对前端设备进行监控和管理,获取车载DVR 实时视频、历史录像、地图定位,对设备状态进行查询和管理。
3 车内安全监控系统的关键技术
3.1 智能视频技术
3.1.1 智能视频图像处理技术
视频图像处理技术已能够实现高清高帧率实时透雾处理、超低强度处理、实时精细降噪处理、无损实时放大处理、强光抑制处理等。具体包括以下几个方面:a.图像获取、表示和表现:把模拟信号转化为计算机可识别的数字形式,以及把数字图像显示和表现出来。b.图像增强:强调图像的某些特征,以便进行进一步分析。对于图像退化有关的定量信息,图像增强技术可以较为主观地改善图像的质量。c.图像恢复:对质量下降的图像,可能通过计算机处理加以重建或恢复。d.图像重建:通过物体外部测量的数据的处理获得物体的三维形状信息。e.图像压缩:包括有损数据压缩和无损数据压缩。f.图像分割:把图像按特定性质区域进行划分,便于对设定目标的提取。
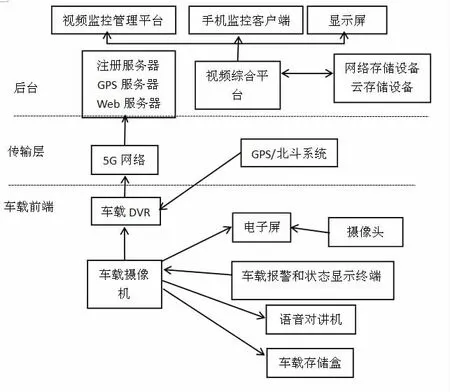
图1 车内安全监控系统组成方案
3.1.2 智能视频技术在本系统的应用
本系统主要利用自动分析和提取视频源中的关键信息的智能视频技术,借助计算机强大的数据处理能力,对视频画面中的海量数据进行高速分析、过滤,提取有用的关键信息,并依据设定的规则进行判断和报警,是系统的关键技术。其中,设定的规则是指突然入侵危险检测等,可以定义“越界”、“识别”、“危险”等等报警规则。
图2 为智能视频监控系统的工作流程图。实时的或历史的视频数据流通过视频基础管理单元传输到视频数据中心,通过配置管理服务器,将任务分发到智能分析服务器进行分析,分析结果传输至智能监控客户端[4]。本系统中,乘客和驾驶员的视频数据通过上述的一系列处理后,最终将分析结果传输至后台,使网约车平台实现实时观察乘客和驾驶员状态的功能。
3.2 人体动作识别技术
3.2.1 动作识别特征
从视频图像监测中提取出有效的运动特征是人体动作识别中重要的一环,直接影响到动作识别的准确度,且同一特征对不同类别人体动作的描述能力并不相同。因此,我们依据视频清晰度的高低和应用场景的变化,往往要选用不同类型的特征,这与具体的应用场所以及乘客所关心的动作类别有很大的关系。
常见的形状、轨迹、物体、姿态等特征可以分为四类:基于轮廓和形状的静态特征、基于光流或运动信息的动态特征、基于时空立方体的时空特征、描述性特征[5]。如表1 所示。
3.2.2 人体动作识别技术在本系统的应用
人体异常行为识别主要是对包含人的动作图像序列进行分析处理,通常涉及到动作目标检测、运动目标分类、运动目标追踪、特征提取与运动描述和人体行为分析5 个阶段。本系统的需求是对驾驶员和乘客危险动作进行识别,以判断是否有异常的行为发生。首先通过视频监控进行动作检测与追踪,然后通过计算机计算出运动直方图,提取出视频中的主要动作特征,最后,对主要动作特征进行编码,运用模板匹配法或状态空间法,与预先保存好的正常动作的编码进行比较,从而判断驾驶员或乘客的动作是否属于危险动作。
3.3 红外成像技术的应用
普通的视频采集无法做到全天候运行,如车辆在夜间行驶时,普通视频监控失去了监控功能。而利用目标自身的红外热辐射原理的红外热成像仪,即可实现全天候对监控目标的监测。通过光电红外探测器将物体发热部位辐射的功率信号转换成电信号后,成像装置就可以一一对应地模拟出物体表面温度的空间分布,最后经系统处理,形成热图像视频信号,就得到与物体表面热分布相对应的热像图,即红外热图像。由于利用景物自身发射的热辐射图像,从而在根本上解决了夜间观察中光强不足的问题。另外,在雨、雾等恶劣的气候条件下,由于可见光的波长短,克服障碍的能力差,因而观测效果差,而工作在8~14μm 波长的长波红外热成像仪,其穿透雨、雾的能力较高,从而仍可以正常地观测目标。因此,在夜间以及恶劣气候条件下,红外热成像视频监控设备可以对驾驶员、乘客等各种目标进行全天候智能监控。
红外热成像监控技术的图像画面质量比较均匀,确保夜间监控也能够清晰可见。红外热成像智能视频监控技术的隐蔽性比较好,它在运行的过程中能够抵抗雾霾、烟尘等复杂气象条件的干扰,并且广泛地运用到夜间监控项目之中[6]。因此,在夜间或恶劣气候条件下,红外热成像视频监控设备可以对驾驶员、乘客等目标进行全天候智能监控。
4 应用展望
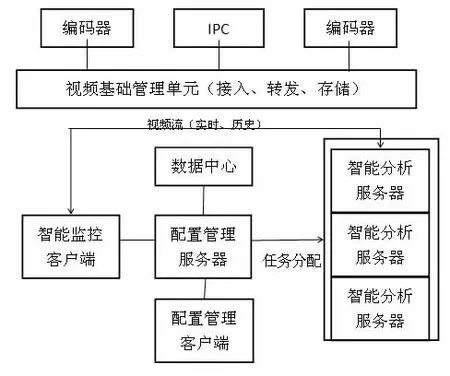
图2 智能视频系统的工作流程图
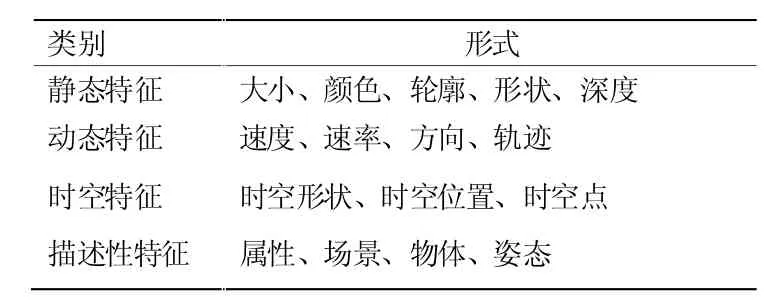
表1 动作识别中常用特征分类表
车内安全监控系统如与公安部门信息系统关联,可以提高预警的速度和营救的效率,缩短从软件预警到警方出警的时间;如配套设立更多的相关救援站,避免出现监控救援的盲区;由于应用了定位系统,后期系统还应加大定位的准确性和实时性的研究;该系统也需要使用乘客的定位、声音、紧急联系人等信息,因此须加强系统的防御功能,防止用户的信息泄露,个人隐私受到侵犯。
车内安全监控系统以智能视频技术为核心、以红外热成象技术和人体关键点检测为辅助技术,以5G 通信技术为传播媒介;通过系统平台,在对车辆进行全方位实时定位监控的基础上,增加了危险动作的识别功能,从而使系统具备了及时监测紧急事件并快速处理突发情况,杜绝类似女性乘客乘坐网约车遇害事件的发生,保护乘客及驾驶员的人身安全,提高了网约车、出租车的安全性和可信性。
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
汽车实用技术(2022年7期)2022-04-20
中学生数理化·八年级物理人教版(2022年3期)2022-03-16
汽车实用技术(2022年4期)2022-03-07
疯狂英语·新读写(2021年10期)2021-12-07
文苑(2019年24期)2020-01-06
新世纪智能(英语备考)(2019年4期)2019-06-26
活力(2019年22期)2019-03-16
今日农业(2019年16期)2019-01-03
体育科研(2014年5期)2014-04-16