
基于同化竞争QPSO算法的结构模态参数识别
2020-06-08 06:55卢俊龙
苏州科技大学学报(工程技术版) 2020年1期
孟 浩,卢俊龙
(1.江苏合谷建筑设计有限公司,江苏 苏州215000;2.西安理工大学 土木建筑工程学院,陕西 西安710048)
当前我国城市化进程不断加快,建成了规模较大的高层建筑及大跨度桥梁。而随着时间的推移,工程结构在材料的老化、环境侵蚀、超载工作和灾害等因素的作用下,出现强度及刚度退化,严重影响结构使用功能。因此,利用现代信息及计算机分析方法等,对服役结构进行健康检测和损伤识别,实时监控结构安全情况,预防各类灾害的发生。
当前,许多研究人员将自动计算技术与结构参数识别相结合,提出了效率更高的优化识别方法。Perry和Koh[1]等人对遗传算法进行改进,并进行结构参数识别;Koh[2]等人利用遗传算法对剪切变形结构进行整体参数识别,效果较好;Tang[3]将微分演化算法引入系统识别中,群体智能优化算法是目前应用较为流行的一种算法,在计算机、经济及结构工程等领域得到大量的应用。PSO算法凭借概念简单、容易且收敛速度快,已在很多领域得到应用。Coelho和Krohling等人[4]在结构整体识别当中,引入PSO算法,取得了较好的分析结果。榎本裕里[5]将PSO算法进行优化,将其中系统识别问题转化成高维多模优化问题,并进行了相关分析。张伟[6]将标准的PSO算法引入结构参数识别当中。虽然,PSO算法得到了大量应用,但依然存在容易陷入局部最优的问题。针对这一情况,孙俊等人对其进行改进,提出了量子粒子群算法(QPSO)[7],同样,在模态参数识别领域,王兰彬[8]将QPSO算法运用到结构模态参数识别当中,取得了较好结果。常军[9-10]采用频响函数作为目标函数,运用QPSO算法,对环境激励下的结构模态参数进行了有效识别,效果较好。闫天红等[11]根据结构振动特征方程,分析了结构模态参数对结构参数改变的灵敏度表达式,建立了结构模态参数损伤识别关系式。方圣恩等[12]对于结构不确定性损伤识别问题进行了研究,发现经典区间算法容易发生扩张。虽然,QPSO为一种优化后的算法,但是,也存在全局寻优速率不足的问题,特别当应用在结构参数识别中时,由于优化问题比较复杂,所以识别精度仍不是很高,且常常不容易收敛,或陷入局部最优。针对QPSO算法全局寻优效率较低的,易陷入局部最优的问题,本文对QPSO算法进行优化,并通过测试函数来验证其有效性。通过简支梁与振动台试验分析,表明该方法具有较好的模态识别能力,可靠性较高。
1 基于同化竞争QPSO算法
1.1 同化竞争方法
本文将同化竞争方法引入量子粒子群优化算法(ACQPSO)当中,根据QPSO算法,每次迭代产生一个全局最优粒子,并不断影响其余粒子,使其与自己越来越接近。以数学方法对同化过程进行表示,采用随机数y表示粒子与全局最优粒子之间的移动的距离,具体公式为

式中,ξ为同化系数,d为粒子与全局最优粒子之间的距离。得到粒子移动公式为

式中,Xnew为同化后粒子新位置,Xold为同化前位置,V为方向向量。
同化可以看成是粒子向最优值的进一步发展,在最优粒子同化的同时,粒子与粒子之间也产生斗争,在这也可理解成是一种竞争关系,粒子之间互相竞争,若存在更优的粒子,这个粒子将取代原来的最优粒子,其粒子运动示意图如图1所示。总的来说,在QPSO算法的粒子进化方式中引入同化与竞争思想,能有效提高全局寻优效率,并改善算法容易陷入局部最优的缺陷。
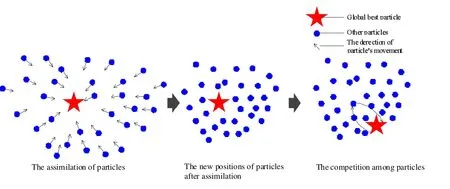
图1 粒子同化与竞争示意图
1.2 改进算法有效性分析
针对ACQPSO算法的有效性进行验证,对6个常用标准测试函数进行分析,函数相关信息如表1所示,采用ACQPSO算法进行识别,并与QPSO计算结果进行比较。在这次分析当中,种群规模、维数、最大迭代次数分别为:20、10和1 000,收缩-扩张因子α的值随迭代次数从1.0到0.5线性减小,同化系数ξ=2。具体结果见表2。
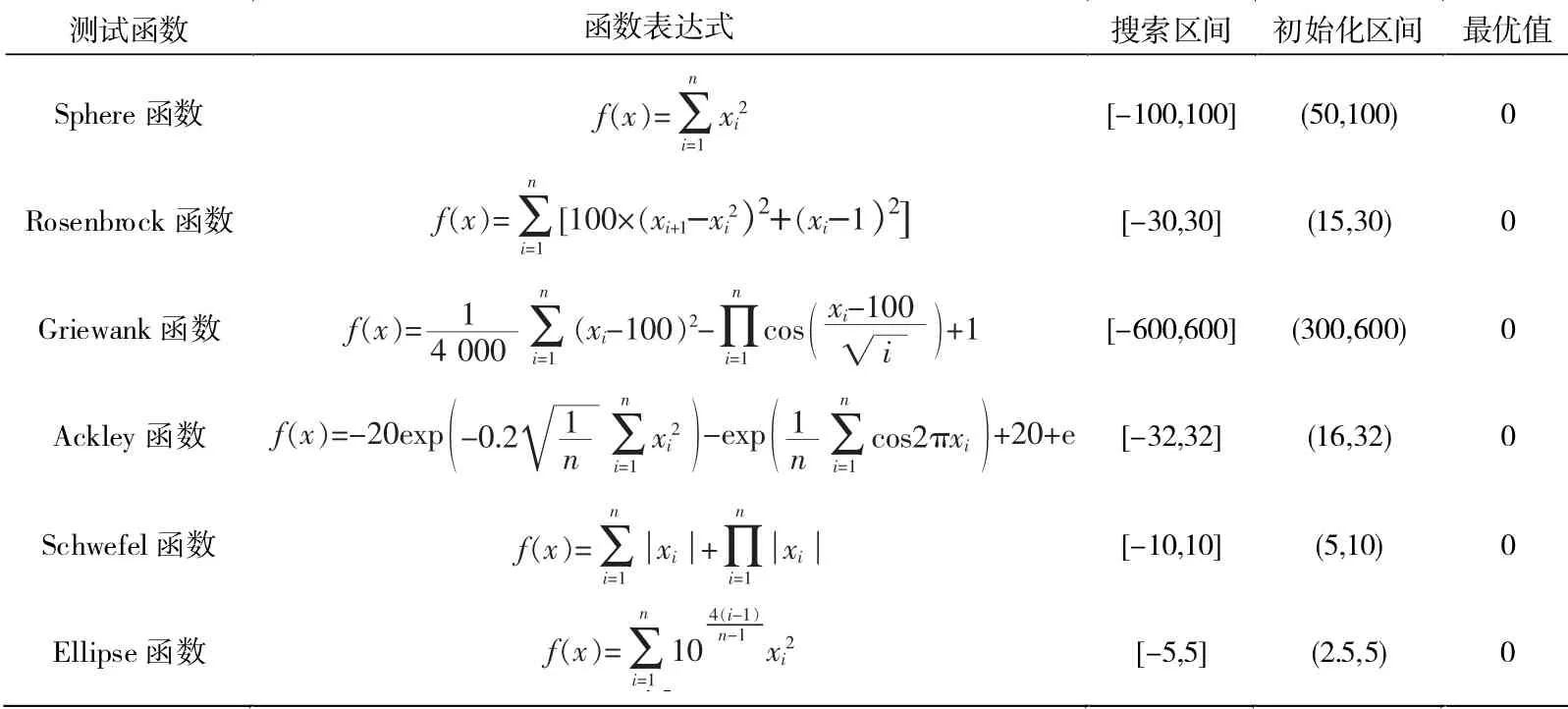
表1 测试函数相关信息

表2 测试函数的测试结果
对计算结果和寻优曲线分析发现:ACQPSO的计算效果远远好于QPSO算法,说明同化和竞争的引入,可大大提高粒子进化过程,明显增大算法的寻优效率、收敛速度,降低陷入局部最优的概率,取得了令人满意的结果,见图2。
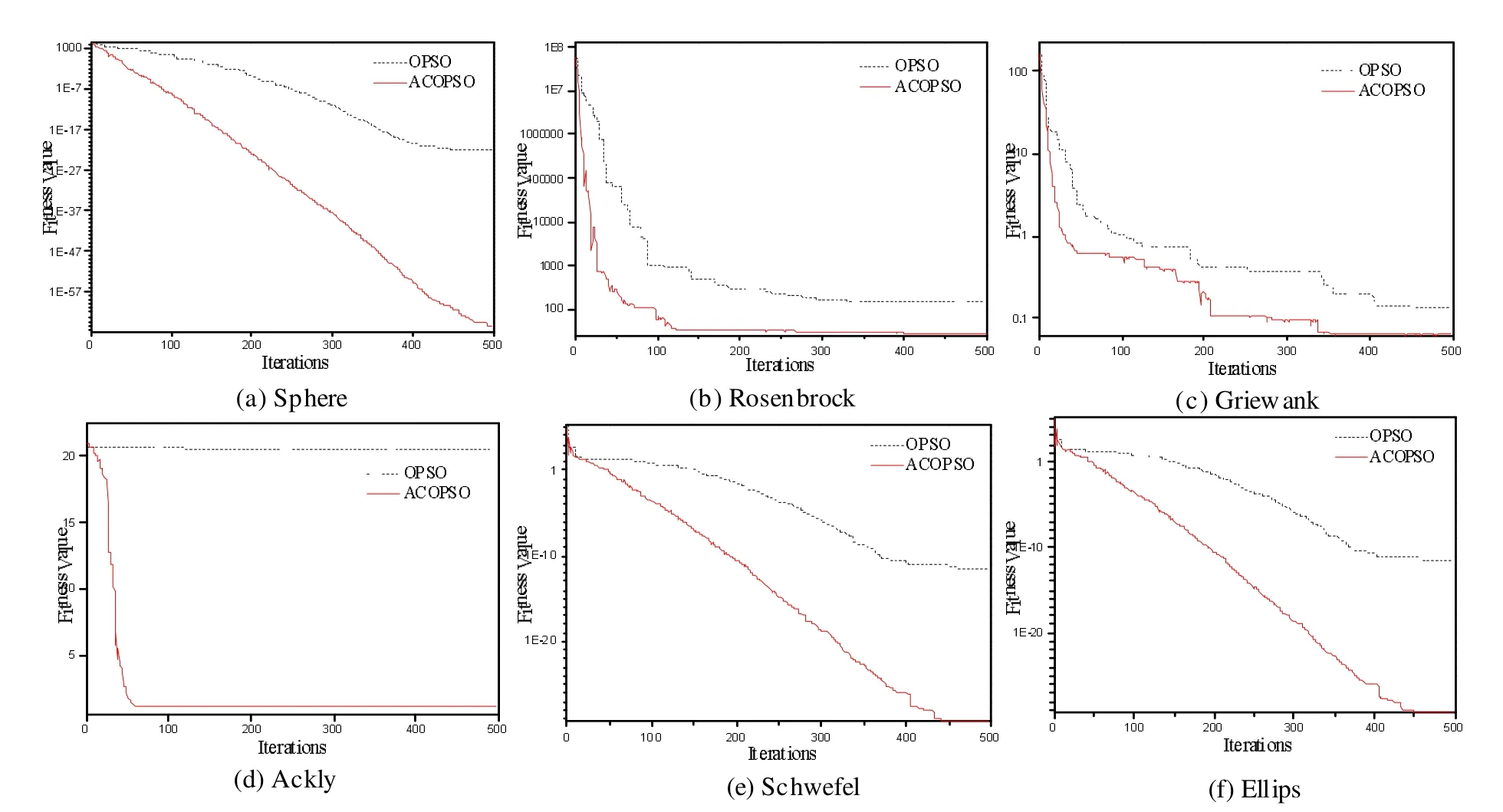
图2 寻优曲线变化规律
2 模态参数识别方法
2.1 问题描述
模态参数识别的关键在于缩小结构实际响应与预测响应之间的误差。设y(t)为k个自由度粘性阻尼结构的振动响应,具体公式为

式中,yi(t)为振动响应输出,Ai为振动幅值,ωni为无阻尼圆频率、ωdi为有阻尼圆频率,ζi为阻尼比,φi为相位角,t为时间。有阻尼圆频率ωdi计算公式为
区内地势较为平缓,海拔在2800~3700m,最高山峰位于滩北雪峰东北的黑山,海拔3983m,相对高差较小,多在50~200m之间。区内的地貌主要由山体、剥蚀残山和河谷型小断陷盆地构成。在地貌分类学上属于剥蚀平原、丘陵、低山地貌类型,平缓地区多为可移动的沙丘。区内的山体多为长条带状NWW向展布,山体宽数百米至数千米。

均方误差函数计算公式为


式中,θmax、θmin分别表示识别参数区间上、下界。
2.2 识别步骤
本文将运用ACQPSO算法作为优化算法,对结构模态进行分析识别,具体流程:
(1)根据结构模态参数,确定需要识别的维数;再按照待识别的参数,进行可行解空间大小的判断;
(2)根据结构激励的输出信号,基于待测模型的均方误差建立目标函数;
(3)根据ACQPSO方法,对上面的目标函数进行优化;
(4)给出终止条件,以此对全局最优位置进行判断。
其计算流程见图3。
3 结构模态参数识别应用与分析
3.1 简支梁数值模拟
简支梁模型及加速度传感器布置情况如图4所示,为两端简支矩形梁,具体尺寸为26 mm×10 mm,梁长为3 m,采用Q235钢制作。在加速度传感器位置进行白噪声扫描。采样频率为1 000 Hz,响应信号时间50 s,按要求设置Rayleigh阻尼,加噪0%,5%,10%,20%,30%。模型分析分别采用QPSO和ACQPSO算法,进行结构模态参数识别,粒子数为60,迭代数选用2 000,α随迭代次数从1.0到0.5线性减小,同化系数ξ=1.5,分析结果如表3至表5所列。
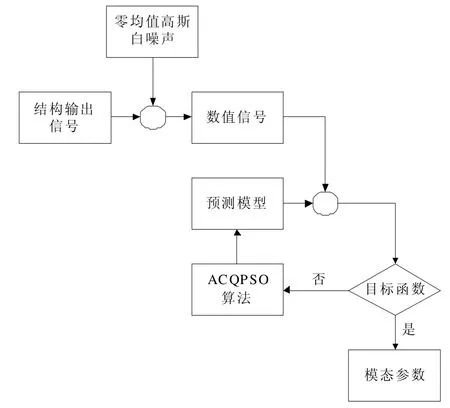
图3 基于ACQPSO算法的模态参数识别
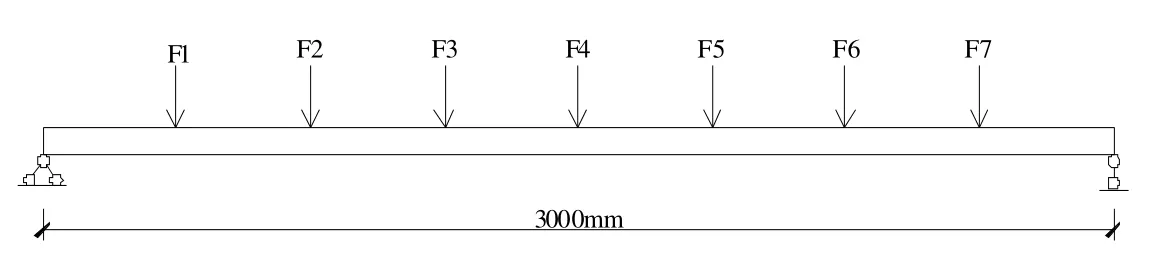
图4 简支梁模型
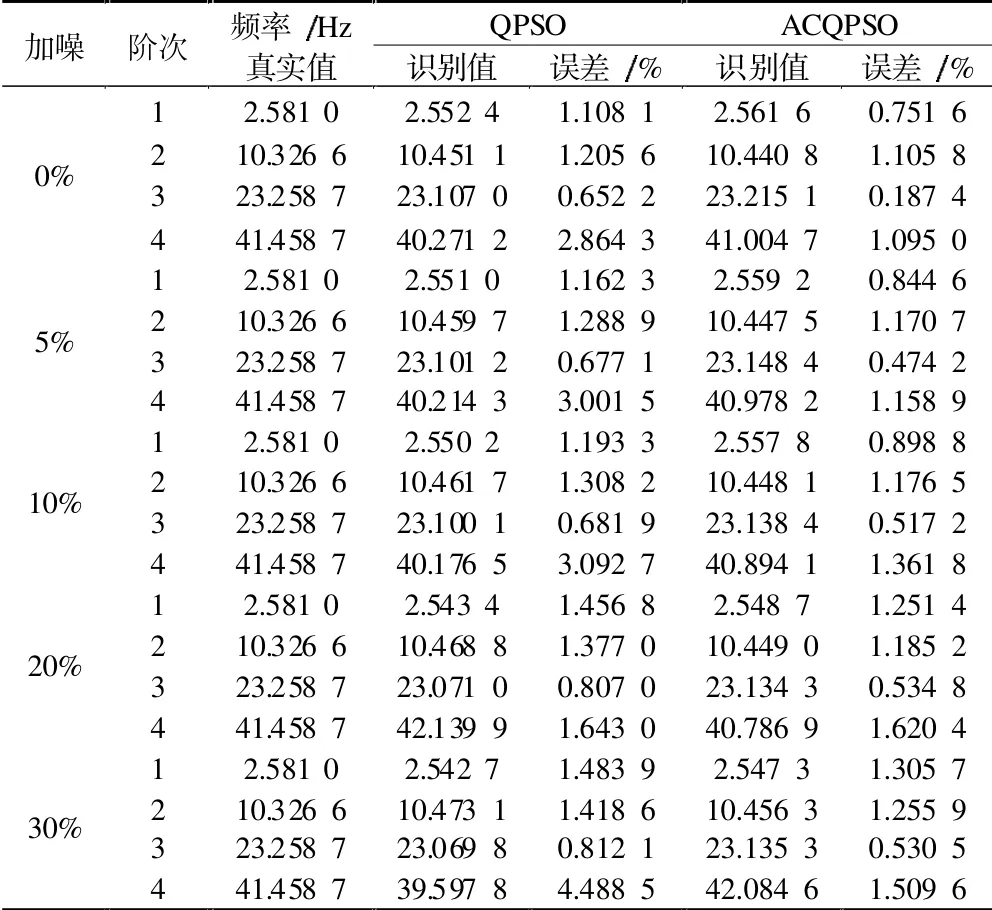
表3 结构固有频率分析
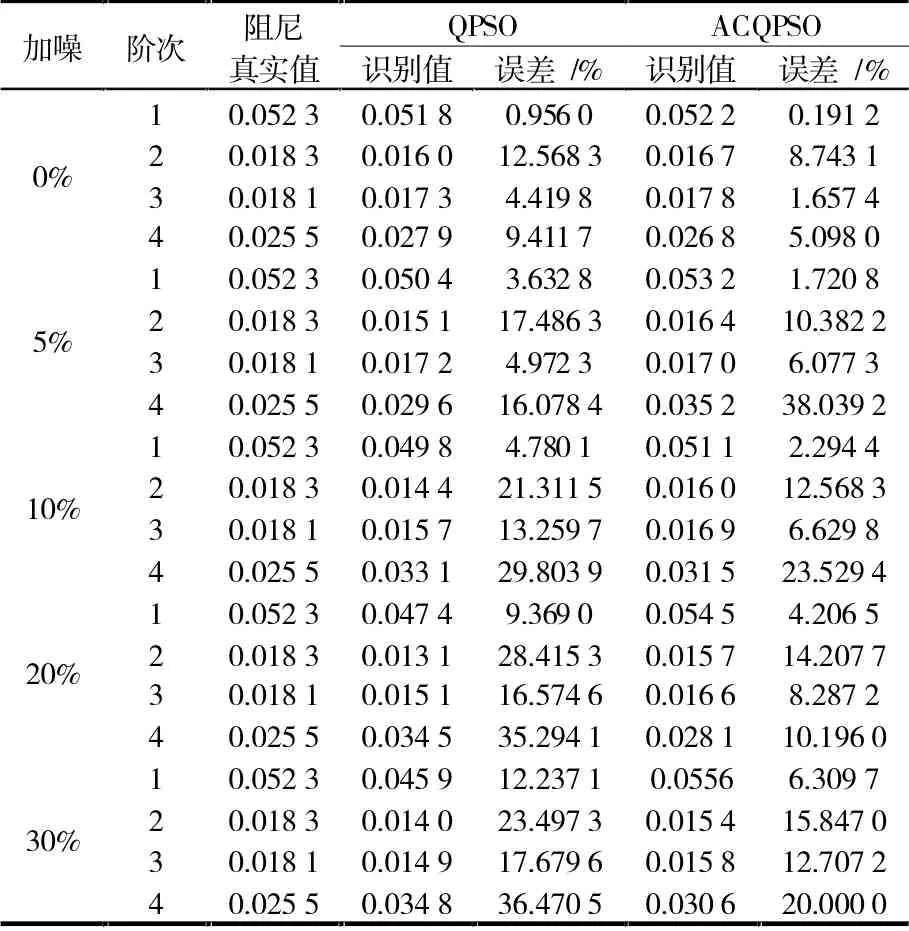
表4 结构阻尼比识别结果
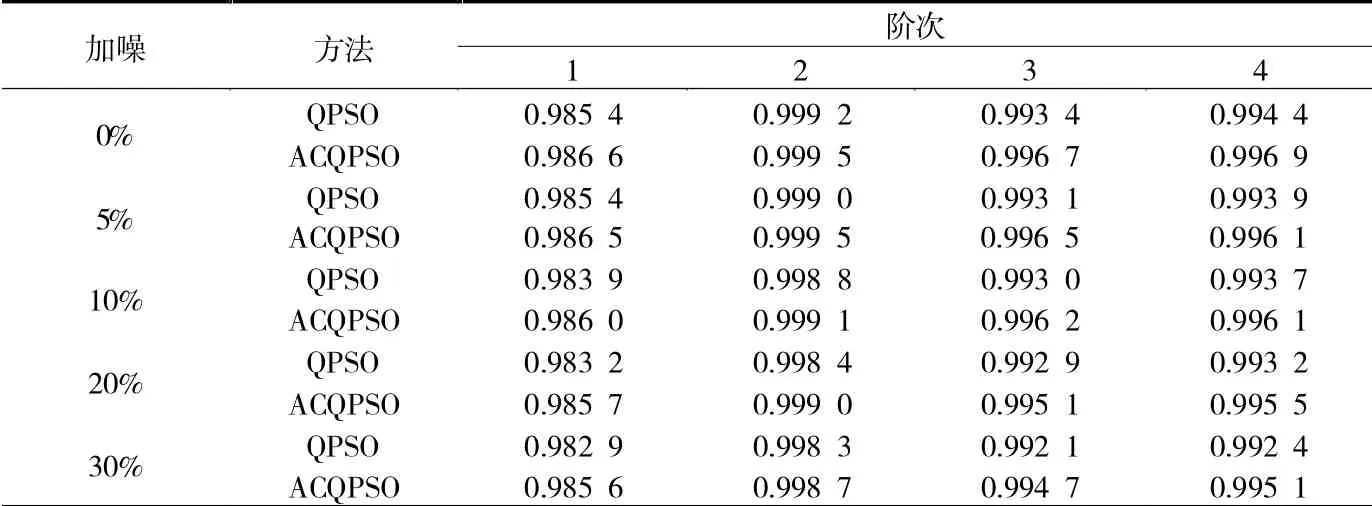
表5 结构振型MAC值识别结果
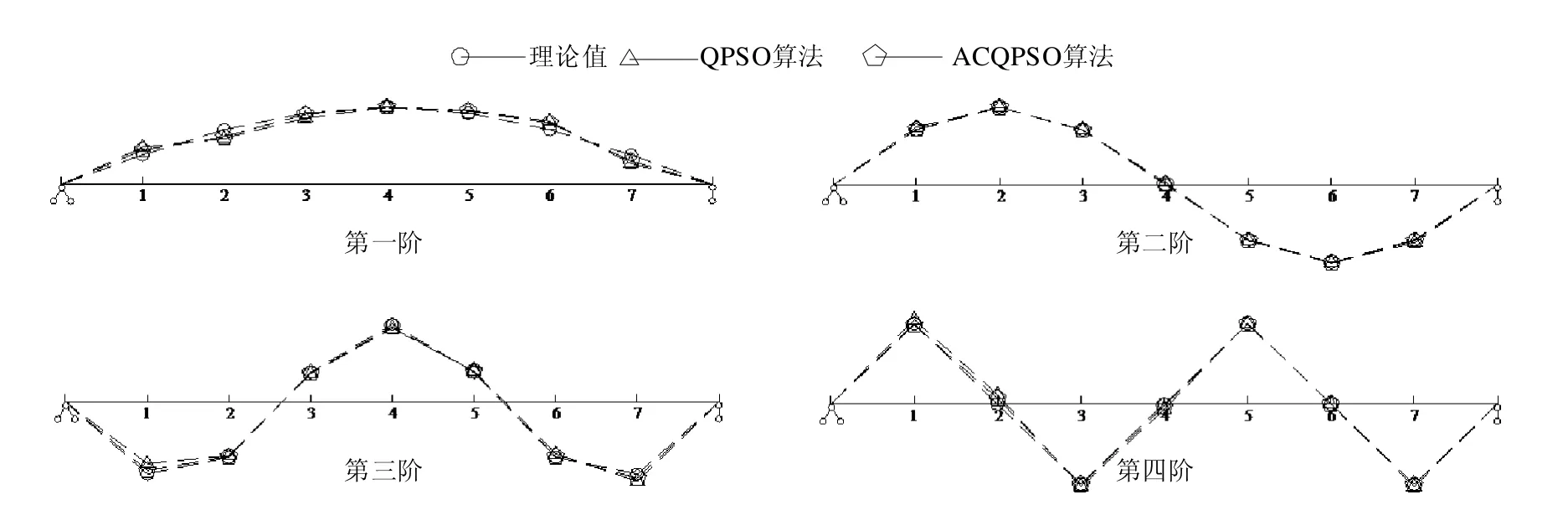
图5 0%噪声下的简支梁结构振型识别
通过对简支梁模态识别结果进行分析,可以发现:均方误差作为目标函数,可有效识别结构模态参数,频率、阻尼、振型等识别结果均较为精确。对比分析QPSO和ACQPSO可发现,后者明显占优,特别在频率和振型的识别方面。随着噪声不断提高,ACQPSO算法的抗干扰能力也更好。
3.2 三层框架结构参数识别
针对如图6所示3层钢框架进行振动测试,每层布置有加速度传感器,用来分析各层加速度响应,传感器采样频率为512 Hz,以试验开始作为0 s时刻,第5.85秒时开始激励,第20秒试验结束。收集提取全部试验数据进行分析处理。分别采用峰值法、QPSO和ACQPSO算法,对信号响应进行处理分析。试验识别粒子数为60,迭代次数是3 000,α的值随迭代次数从1.0到0.5线性减小,同化系数ξ=1.5,识别结果见表6和表7。
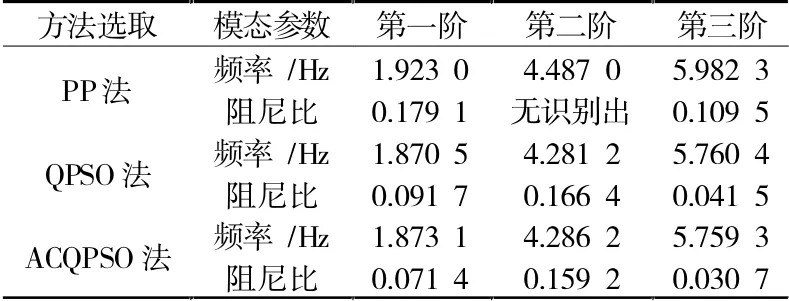
表6 结构频率及阻尼识别
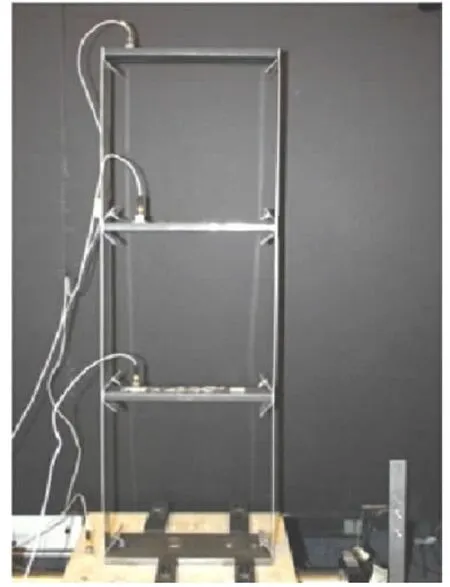
图6 三层框架结构试验
由于PP法在识别方法中较为成熟,本文采用PP法的识别结果作为对比标准,来检验ACQPSO算法的有效性,见图7。从试验识别结果来看,频率方面,ACQPSO与QPSO算法的识别结果与PP法都较为接近;阻尼方面,PP法对于结构第2阶阻尼数值识别较差,而QPSO与ACQPSO识别结果较为准确;振型方面,通过MAC值对比,ACQPSO算法与PP法识别结果较为接近。由此可见,ACQPSO算法具有较高精度与可靠性。
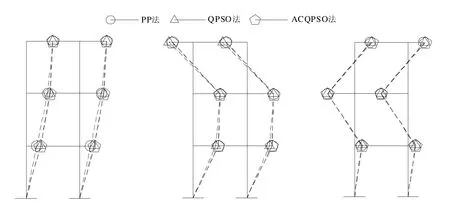
图7 三层框架试验振型识别
4 结语
由于QPSO算法全局寻优效率较低,易陷入局部最优问题,本文采用同化竞争方式进行优化,提出ACQPSO算法。针对几种典型测试函数进行分析发现,该算法的全局寻优效率得到明显提高,同时,避免了陷入局部最优的问题。采用ACQPSO算法对简支梁进行识别分析,计算结果显著优于QPSO算法,表明优化后的识别精度与抗干扰能力都得到加强。对三层框架结构进行振动测试,分析动态信号,并采用PP法作为标准,结果发现:ACQPSO无论从识别精度,还是抗干扰性上,都具有显著的优势。
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
中国医院院长(2022年13期)2022-08-15
汽车实用技术(2022年10期)2022-06-09
昆明医科大学学报(2022年3期)2022-04-19
军民两用技术与产品(2021年6期)2021-10-14
防爆电机(2021年3期)2021-07-21
中国传媒大学学报(自然科学版)(2021年1期)2021-06-09
南京大学学报(数学半年刊)(2020年1期)2020-03-19
现代计算机(2019年19期)2019-08-12
北方工业大学学报(2019年5期)2019-03-30
