
新能源汽车生态驾驶研究
2020-06-05 06:10曾思婕
公路与汽运 2020年2期
曾思婕
(长安大学 公路学院,陕西 西安 710064)
1 新能源汽车的发展背景
1.1 能源问题
传统的内燃机汽车主要以石油为燃料。1886年,卡尔·本茨和戈特利布·戴姆勒发明内燃机。最初的内燃机排气量为0.984 L,最大功率0.514 8 kW/400 r/min,行驶速度15 km/h。随着技术的进步,发动机排量越来越大。到1910年,世界上最早突破时速200 km/h的汽车搭载的是奔驰汽车公司开发的引擎。法国标致最早开始研究发动机排量的降低,搭载7.6 L排量发动机的标致在速度上战胜了14.1 L排量的菲亚特。1970年,美国通过内燃机排放相关禁止法令,内燃机面临新的转型。
1992年,美国加利福尼亚州发布清洁空气法案,对平均油耗和污染物排放作出规定,使美国的汽车制造商纷纷针对动力总成开发确立新的研发方向。随后开发出发动机直喷技术结合涡轮增压系统,可实现小排量和高动力,且直喷方式由于缸内爆震更强,有利于提高燃油效率,降低排放污染。21世纪初,全美八缸汽车发动机的市场占有率为45%,现已下降到15%,四缸汽车发动机的占有率则提升到70%。
2017年8月,第十六届国际内燃机展在北京国家会议中心举行。在符合政策法规的基础上,节能减排是永恒的主题,内燃机的进化升级仍在不断进行,应对国六排放标准是当务之急。
尽管在此发展背景下传统内燃机及其优势并不会很快消亡,但根据2010年上海发布的《BP世界能源统计》,截至2009年底,全球已探明的石油储量为13 331亿桶左右,以目前的开采速度,估计可连续开采45.7年。为减轻各行业对石油进口的依赖,发展新能源电动汽车势在必行。
1.2 环境污染
汽车尾气排放主要包括温室气体CO2和有害气体CO、HC、NOx等。据国际能源机构(IEA)估算,全球由汽车尾气排放的CO2将从1990年的29亿t上升到2020年的60亿t。
近年来导致中国部分城市出现严重雾霾天气的原因之一就是汽车尾气排放。根据天气网的全国雾24 h预报,华中、华东、西南地区均出现了雾霾现象,在每年年底至次年2月都会持续出现雾霾天气(见图1)。2014年,第三十八届国务院常务委员会上提出治理雾霾,2017年将“坚决打好蓝天保卫战”写入政府工作报告。

图1 中央气象台全国雾24 h预报(2017年11-20日20:00—21日20:00)
1.3 新能源汽车发展现状
新能源汽车是指采用非常规车用燃料作为动力来源,综合车辆动力控制和驱动先进技术形成具有新技术和新结构的汽车,包括纯电动汽车、氢发动机汽车、燃料电池电动汽车、增程式电动汽车、混合动力汽车。发展新能源汽车旨在降低能耗、减少污染、降低对传统能源的依赖。
自“十一五”以来,中国陆续出台了扶持新能源汽车发展的政策。2010年9月,国务院审议通过《关于加快培育发展战略性新兴产业的决定》,至此,新能源汽车被定为国家战略性新兴产业。2012年6月,推出《节能与新能源汽车产业发展规划(2011—2020)》,这是引领中国新能源汽车产业发展的重要政策。
近年来,活跃于汽车市场的有纯电动汽车和混合动力汽车,主要代表有比亚迪、奇瑞、北汽等。2015年,新能源汽车产销量突破30万辆,累计突破50万辆,在全球新能源汽车产销中的占比超过50%。2016年,电动汽车保有量为109万辆,超越美国成为全球最大的新能源汽车生产国。与此同时,充电设施建设也呈规模化发展。
2 生态驾驶
2.1 生态驾驶的优势和必要性
随着汽车保有量的不断增加,燃油消耗持续快速增长。据中国环保部公布的《中国机动车环境管理年报(2017)》,交通运输排放污染物占总体污染物的22%,机动车尾气污染已成为中国空气污染的重要来源。
作为出行者和用路者,可通过多种方式减少与个人交通相关的GHG(Greenhouse Gas,温室效应气体):1)购车时选择燃油效率较高的车辆,减少不完全燃烧造成的空气污染。然而由于汽车费用昂贵,更换汽车的时间周期很长,这种办法对改善环境的效果甚微。2)购买使用低碳燃料如电能的汽车。中国通过在中央政策上实行对车主优惠购置税和地方政策上实行不限行、免路费等财政补贴来控制机动车购买的相关政策正是为了鼓励大家购买新能源电动汽车。3)鼓励民众优先选用公共交通和拼车出行。这项措施正在逐步推广,且效果很好。地铁的准时性、公交的低价性及公交线路网覆盖范围广泛,人们逐渐形成了出门首选地铁和公交的习惯。4)推广生态驾驶。这项措施的减排效果快速、经济、高效。
生态驾驶能带来巨大的经济潜力,研究表明:生态驾驶所带来的燃油节省率在10%左右,按照中国每年大约消耗6 000万t汽油计算,生态驾驶将节省600万t汽油。按每吨汽油换算为1 355 L、每升汽油6.5元计算,可节约500多亿元。1 L汽油燃烧向大气排放的CO2为2.31 kg,采取生态驾驶能减少CO2排放约180亿kg。看似微小的行为改变却能带来如此巨大的社会经济效益,可见推广生态驾驶十分必要。不仅社会层面上收获效益,对于每个使用汽车的家庭,也能节省不少费用。从这三方面来看,推广生态驾驶的重要性显而易见。
2.2 驾驶行为学
生态驾驶,又称绿色驾驶,是继安全驾驶之后,以适应现代发动机技术为基础的经济、绿色的驾车理念和技能。生态驾驶的目的在于通过改善驾驶人的行为达到经济、环境、安全的三赢局面。
生态驾驶的主要特征:适当加速,及时换挡;通过预测交通流和信号灯变化避免突然加减速;保持平稳的行驶速度,如在高速公路上行驶时酌情使用巡航控制系统等。
在分析生态驾驶时,应与节能驾驶区分开来。在策略上,节能驾驶为保证燃油的经济性而略微牺牲安全性,而生态驾驶没有任何权衡取舍。生态驾驶的优势不仅体现在降低个人驾驶成本、减少交通事故发生方面,而且能产生巨大的社会经济效益,如减少温室气体和有害尾气(CO、HC、NOx)排放、减少石油进口、减少因交通事故造成的人员伤亡等,是对个人和社会双赢的主张。
2.3 生态路线规划
区别于生态驾驶的另一个概念是生态路线规划。生态路线来源于国内外关于不同行驶路线导致不同燃油消耗及排放的研究,瑞典的一项研究表明,46%的出行不是在燃油效率最高的路线上进行的,这些出行可通过燃油优化的导航系统平均节省8%燃油。但研究也表明,燃料最少或排放最低的路线并非与行驶时间最短路线一致,这是由于行驶速度与车辆燃料消耗或排放之间存在非线性关系。
为此,设计一种生态路线导航系统,为出行者提供起点与目的地之间最环保的路线。该系统包括动态道路网络数据库(道路网络的数字地图,通过嵌入式数据融合算法集成来自多个数据库的历史和实时交通信息)、能量或排放参数(在各种道路特征和交通条件下,各种车辆类型的能量/排放因子)、路由引擎(包含用于最佳路由计算的最短路径算法)、用户界面(用于接收来自用户的始发地—目的地输入并向用户显示路线图)四部分。其核心是数字道路地图,它运用地理信息系统(GIS)建立Dyna Net数据库,存储每条道路链接的特征(长度、功能类别和速度限制等)等静态信息和其他随时间变化的数据,如道路链接上的历史交通流量、密度和速度及定期更新存储实时交通信息,用于后期路线计算或地图显示。
该导航系统通过微观上选择CMEM模型和VT-Micro模型估算车辆的排放量,宏观上使用MOVES模拟器和EMFAC模型估算道路连续车流的排放,最终汇总在不同道路特征和交通条件下各类车辆的能量/排放因子,形成EOPS库(能源或排放操作参数集)。
生态路线导航系统中的路线计算选用Dijkstra算法,该算法能在具有非负边缘路径成本库中搜索最小成本路径。最小成本的“成本”是基于用户的路线偏好,如优先选择高速公路或避开收费公路。该导航系统可根据不同最小化标准(即距离、行驶时间、燃料消耗和CO2、CO、HC、NOx排放)生成多达7条路线,这些路线中以不同目标为基准的路线可能相同,也可能完全不同,如最小的CO2排放路线通常与最小燃料消耗路线相同,但通常不同于最小NOx路线。
生态路线是车辆在实现更好的燃油经济性的同时不损害自己与其他用路者的安全的路线,不建议以60 km/h的速度在最低限速为80 km/h的高速公路上行驶。生态路线导航系统能根据道路特征和当前实时交通状况判断、选择一条生态路线。总的来说,基于生态路线导航系统可灵活根据用户需求提供相应的生态路线,有其合理性和可操作性,但也存在估算错误、信息输入难度等局限性。
3 新能源汽车生态驾驶控制策略
近年来,与交通有关的能源消耗和空气质量问题持续引起全社会关注,但大多数生态研究还集中在内燃机汽车上。为探究电动汽车在减少燃料消耗和污染排放方面的远大前途,各国纷纷展开对电动汽车生态驾驶策略研究。
3.1 基于动态规划的电动汽车最佳驾驶决策分析
通过车联网,电动汽车能更方便地获取更多道路交通信息,假设电动汽车对前方道路的信息已知,以时间最短、能耗最低为双目标规划行车轨迹和车速,利用基于位置域的动态规划算法求解。
(1)建立基于位置域的状态方程:

式中:v(k+1)、v(k)分别为第k+1和k个步长的初始速度;a(k)为第k个步长的加速度;ds为采样距离。
以车速v、电池荷电状态SOC和挡位状态为状态变量,电机输出扭矩和挡位指令为控制变量,则:

式中:SOC(k+1)、SOC(k)分别为第k+1和k个步长的初始荷电状态;VOC为电池的开路电压;Pb为电池功率;Rb为电池的等效内阻;Qn为电池组额定容量(k)为第k个步长的平均速度。
(2)建立以能耗成本E和时间成本t为目标的函数:

式中:β1、β2分别为能耗与时间的加权因子,β1为车辆行驶所用能耗成本占电动汽车行驶总成本的比例,β2为车辆行驶所用时间成本占电动汽车行驶总成本的比例,二者都为非负数,且β1+β2=1;Emax、tmax分别车辆行驶一定里程的能耗与时间,考虑到能耗与时间的单位不统一,进行归一化处理,取Emax=30 W·h,tmax=1 s。
(3)以工况、车辆实际工作能力作为约束条件,根据动态规划算法,输入为:

式中:u(k,i)为对应位置k下的第i个状态;J(k+1)为从位置k+1到终端的累积成本;L[k,u(k,i)]为从位置k转移到位置k+1的转移成本。
(4)仿真分析权重系数、道路滚动阻力系数分布、坡度分布和区域限速对整体控制策略的影响,得出若路程较长则推荐电动汽车快速提速到最优巡航速度,然后保持匀速行驶,驾驶员根据路面实际情况和限度动态调整油门踏板使电机位于最高效率区段以达到节约能耗的目的。
3.2 新能源汽车燃油效率的潜力分析
混合动力汽车与传统汽车相比,其燃油效率更高,体现在内燃发动机和电动机之间的转矩分配、换挡策略不同。下面介绍一种基于车速、扭矩、换挡3个自由度,运用离散动态规划、动态编程的方法优化扭矩分配,得出变速和速度轨迹(设计速度轨迹是为了最大程度提高能量回收潜力,同时将燃料消耗降至最低)的全局最优解决方案,找出随时间变化3个自由度实现最低油耗的推荐值,为现实生产和技术革新提供参考。
该控制策略的建模分析:建立车辆模型,一个类似于Guzzella的纵向动力学模型:

式中:meff为有效质量,由车辆质量m和轴、车轮、发动机、马达等转动部件组成;Fair为空气阻力;Fg为道路坡度力;Froll为滚动阻力;Fpower由所有发动机扭矩和动力总成中的损耗组成;Tbrk为行车制动器的扭矩;rwhl为车轮转向半径。
该模型含有5个状态参量:x=[v,xSOC,ng,bclt,beng]T,输入参量为u=[Tgen,Tem,ug,ueng]T。目标函数基于最小油耗、与期望速度的偏差值最小、全过程实现电能支持,应用Runge-Kutta-type积分,不断调整各阶段的速度和加速度偏差值的权重,从而得出EM扭矩、变速和速度轨迹、换挡的最佳控制策略。
该控制策略与使用ECMS能量管理系统具有电荷维持的固定等效系数、变速查询和带有PI控制器的基线策略相比,燃油消耗降低约6.8%;与具有固定速度、在处于全功率时施加EM扭矩以避免降挡从而提高驾驶舒适性的动态规划方案相比,燃油消耗降低约4.3%。
如表1所示,将5种加权方案应用于该控制策略,标准化油耗、标准化行程时间、换挡策略、熄火时间占比、平均速度偏差、平均C率指标呈现的不同结果,从而反向指导控制策略各权重的调整。其中:方案1为固定速度曲线;方案2为可变速度曲线,恒定权重ξi,电池电流权重不计;方案3为可变速度曲线,与状态有关的速度和加速度权重ξi(x)通过迭代模拟后续的可驾驶性确定(降低空挡和空载),电池电流权重不计;加权方案4为可变速度曲线,与状态有关的速度和加速度权重ξi(x)通过迭代模拟后续的可驾驶性确定,不计权重的小速度带,电池电流权重不计;加权方案5为可变速度曲线,与状态有关的速度和加速度权重ξi(x)通过迭代模拟后续的可驾驶性确定,电池电流加权。
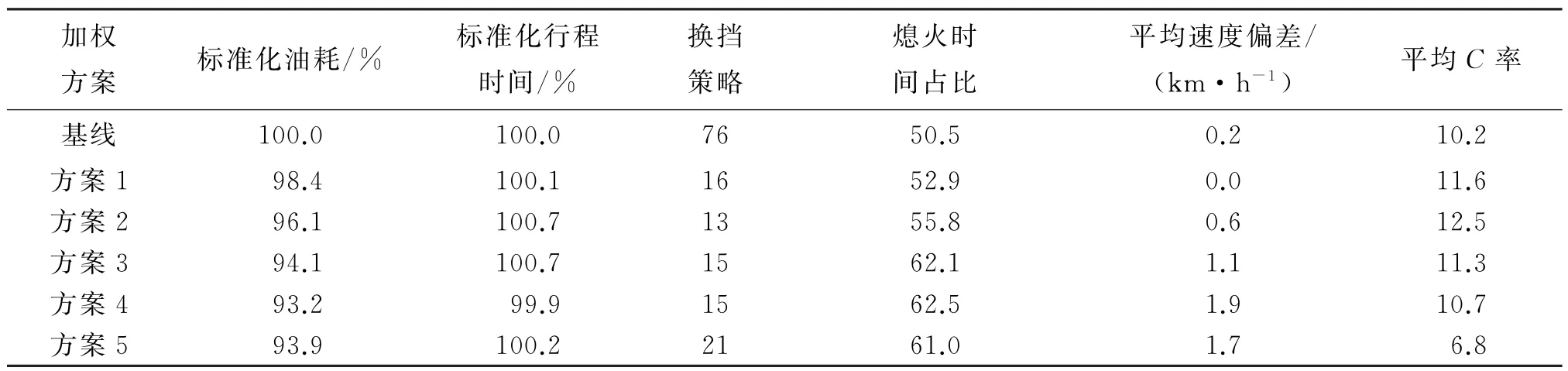
表1 不同加权方法的比较
4 结语
基于近年来国内外对生态驾驶和新能源汽车研究的重要成果,介绍了新能源汽车的发展背景、生态驾驶的优势和必要性,梳理了新能源汽车生态驾驶研究现状,得出以下结论:
(1)若严格按照生态驾驶平稳驾驶,保持速度曲线的平稳,对于传统内燃机汽车能降低至少10%的油耗,降低20%~30%的汽车尾气排放;对于新能源汽车,在无需改变车辆结构的基础上,能节省30%行驶里程,这是一种方便且易行的节能减排新方式。
(2)目前大部分研究选择最低油耗为目标函数,以交通条件、道路条件、外界变化条件等为控制变量建立能源消耗模型,利用动态规划方法,基于最优化理论,建立生态驾驶控制策略,通过辅助仿真模拟等手段验证模型及策略。
猜你喜欢
汽车维修与保养(2021年8期)2021-02-16
数学小灵通·3-4年级(2020年11期)2020-12-14
数学小灵通·3-4年级(2020年3期)2020-06-24
动漫星空(兴趣百科)(2019年3期)2019-03-07
小学生导刊(2017年31期)2017-08-15
海外星云(2016年17期)2016-12-01
瞭望东方周刊(2016年40期)2016-11-02
小学生导刊(低年级)(2016年8期)2016-09-24
自动化博览(2014年10期)2014-02-28
小学生导刊(高年级) (2006年6期)2006-06-27
