
红外连续变焦镜头滑动导向机构运动分析
2020-06-05 06:28路文龙贾钰超李洪兵王彩萍
红外技术 2020年5期
路文龙,李 珊,贾钰超,李洪兵,罗 宏,王彩萍,孙 兴,朱 俊
〈系统与设计〉
红外连续变焦镜头滑动导向机构运动分析
路文龙1,李 珊2,贾钰超1,李洪兵1,罗 宏1,王彩萍1,孙 兴1,朱 俊1
(1. 云南北方驰宏光电有限公司,云南 昆明 650217;2. 昆明理工大学 机电工程学院,云南 昆明 650500)
由于滑动导向机构与镜筒之间为间隙配合,在运动过程中会导致镜片发生不同程度偏移与偏转,因此基于柔体运动学分析理论,对不同运动姿态、不同长径比的滑动导向机构以及导向钉与镜片在导向机构中的排布位置进行运动仿真分析,得出运动姿态、长径比以及导向钉与镜片排布位置对镜片偏移与偏转的影响;结合实际变焦光学系统使用要求,设计嵌套式导向机构并进行仿真分析,验证可行性;根据以上分析结果对红外连续变焦镜头进行设计加工,镜头变焦过程成像清晰,表明此种仿真分析为红外变焦镜头结构设计研究提供一种有效方法。
红外连续变焦镜头;滑动导向机构;运动学仿真
0 引言
红外连续变焦镜头由于其视场可以连续变化,且成像实时清晰,被广泛应用于目标侦查、导弹追踪以及居家安全监控设备。导向机构作为红外连续变焦镜头的核心部件,直接决定镜头变焦过程成像质量的好坏。随着红外连续变焦镜头的不断发展,导向机构也层出不穷,其中按照摩擦形式的不同可以分为滑动摩擦形式与滚动摩擦形式。
主镜筒内表面为承导面,运动镜架外圆与主镜筒配合,进行相对滑动滑动摩擦导向机构,以可靠性能好、成本低被广泛应用[1];其中最为突出的代表形式是采用于两根导向钉对运动镜架进行导向的形式,此形式使得运动镜架受力均匀,不易发生阻卡,同时凸轮变焦曲线布置较少,凸轮有较高的刚度,可以降低加工过程中所带来的变形。但是此种导向机构精度比滚动摩擦形式低,精度主要是由主镜筒与运动镜架配合精度所决定的。在实际变焦过程当中,由于主镜筒与运动镜架为间隙配合,运动镜架在运动过程会造成镜片发生不同程度偏移与偏转,使得光学系统光轴发生偏移,导致最终成像质量下降[2],由此可见保证运动镜架在运动过程当中的平稳与流畅就变得十分重要。如何降低运动镜架在运动过程中镜片的偏移与偏转就成为导向机构的设计重点。刘铁军等提出将导向机构与镜筒为过盈配合来降低导向机构运动对镜片的影响[2];而文献中针对导向机构运动对镜片影响的研究,相对较少。本文基于ADAMS多体动力学软件对导向机构运动过程进行分析研究,以提升变焦过程的成像质量。
1 柔体运动学理论基础
由于红外连续变焦镜头属于光学精密仪器,运动镜架在运动过程中任何一个微小偏移与形变都可能会导致光学系统发生变化,因此在进行运动仿真过程中,需要将运动镜架进行柔性化。柔体与刚体不同,在数值模拟的过程当中,柔体内各点的相对位置会随着时间的变化而变化,无法仅依靠惯性坐标系来表述,通过引入弹性坐标系,将“刚性”运动与弹性变形相结合建立动坐标系,来表述柔体上各点的运动[3]。柔体上任意一点位置向量可以表述为:
=0+(+) (1)
式中:0为点动坐标系在惯性坐标中的向量;为方向余弦矩阵;为点在动坐标系中的向量;为点相对变形向量。
对于有诸多方法进行离散,通常采用模态坐标来描述变形即:
=f(2)
式中:为模态矩阵;f为变形的广义坐标。
对柔性体上任意一点位置向量可以对时间求一次导数得到速度向量,以及两次导数得到加速度向量即:


2 单个导向机构的运动分析
2.1 模型的建立
多体动力学分析软件ADAMS建模能力并不是很强,本文基于Pro/E三维建模软件对模型进行建立,将建立好的模型转换成ACIS文件导入ADAMS当中。
模型主要由镜筒、凸轮筒、运动镜架、压圈、导向钉和镜片组成,其中镜片为Ge材料,其它部件均是由Al材料构成,因此需要对模型材料的密度和弹性模量进行修改。如表1[4]所示。

表1 材料性能参数
为了准确地模拟运动镜架在运动中对镜片的影响,利用ADAMS/viewflex模块,将已经导入的刚体运动镜架柔性化。
根据实际的运动情况对模型加载约束,对镜筒与大地采用固定连接,运动镜架与镜片、压圈和导向钉采用固定副连接,镜筒与凸轮施加旋转副;运动镜架与镜筒之间添加接触力,动摩擦系数为0.03,静摩擦系数为0.05;导向钉与镜筒槽和凸轮施加接触力,由于导向钉上装有滚珠轴承,因此静摩擦系数设置为0.005,动摩擦系数设置为0.003[5];最后添加重力场。通过以上设置,完成模型的建立。
2.2 导向机构运动仿真分析
导向机构在运动过程中对镜片的影响因素诸多,但可以总结为运动镜架运动姿态、长度以及镜片与导向钉在运动镜架上的位置排布。
2.2.1 运动镜架长径比分析
对于运动镜架的长度分析来说,不能简单的以具体长度来衡量,对于不同直径、相同长度的运动镜架,运动时对镜片造成的影响也不同,因此选取运动镜架不同的长度与直径比进行分析。
如图1所示为运动镜架长度与直径示意图,运动镜架的长度与运动镜架直径比分别选取0.5:1、0.7:1、0.9:1、1.1:1、1.3:1、1.5:1以及满足本次仿真透镜安装的最短形式长径比0.16:1。
导向机构中两根导向钉采用对称排布,将导向机构的运动姿态大致分为横姿态、竖姿态和斜45°姿态3大类运动姿态,如图2所示。可以根据每种姿态形式对镜片的影响进行比较分析。
由图3可知,随着运动镜架的不断加长,镜片的偏移与偏转都有很大程度的降低。相比较来说,运动镜架为横姿态时候,变焦时镜片的影响主要来源镜片重力造成的轴的偏移,以及绕轴的偏转,而其它方向偏转与偏移的比较来说相对比较小。由于斜45°运动形式的运动镜架,可以沿45°斜向的滑移,对于镜片就会有两个方向的偏移,同时在运动过程中产生绕导向钉两个方向的偏转,相对于单方向上的影响相对较小。而相对于运动镜架为竖姿态来说,镜片的偏移主要是运动镜架与镜筒配合间隙决定,精度越低镜片的偏移随之增大。通过对比3种姿态的运动情况,可以发现三姿态中竖姿态最好,斜45°姿态其次,横姿态对镜片的影响最大。
根据光机系统设计可知[6],镜片的偏移应保证在0.1mm以内,偏转应保证在0°3¢0²(0.05rad)以内。观察分析结果可知若要满足设计要求:当运动镜架为横姿态时,长径比应在0.9:1以上;当运动镜架为竖直姿态时,在有限的范围内均满足设计要求;当运动镜架为斜45°姿态时,长径比应在0.5:1以上;但由于镜头的实际使用情况不确定,每种姿态均有可能出现,因此运动镜架长径比尽量保证在0.9:1以上。
2.2.2 导向钉与镜片在运动镜架截面位置一致
根据对运动镜架长径比分析结果可知,在运动镜架的长度为长径比1.5:1的情况下,运动镜架运动时对镜片的影响最小,因此本次分析选取长径比为1.5:1的运动镜架,按比例选取镜架5个点,分别以运动镜架全长0位置处、1/4处、1/2处、3/4处和1位置处这5个位置进行仿真分析。导向钉与镜片位置示意图如图4所示。
1)横姿态分析
由图5可以看出,当镜片与导向钉在运动镜架的最中间的时候,对镜片的影响是最大,甚至镜片在轴的偏移量,已经超出了光机系统设计所规定最大偏差位移0.1mm。而相比较镜片与导向钉安置在镜架的两端的时候,运动镜架运动时对镜片的影响相对较小。
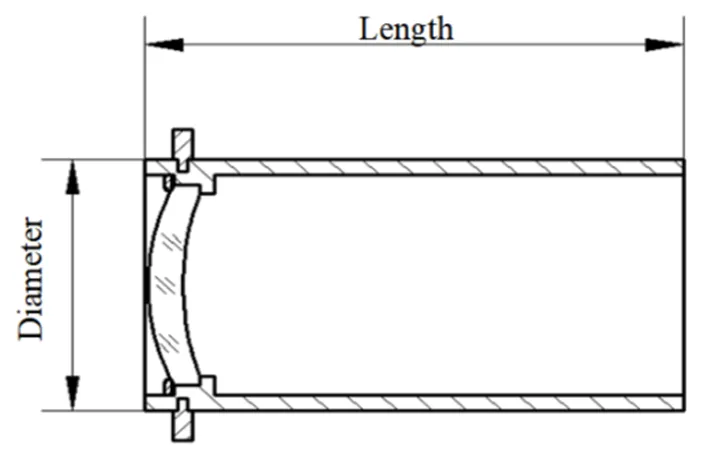
图1 运动镜架长度与直径示意图
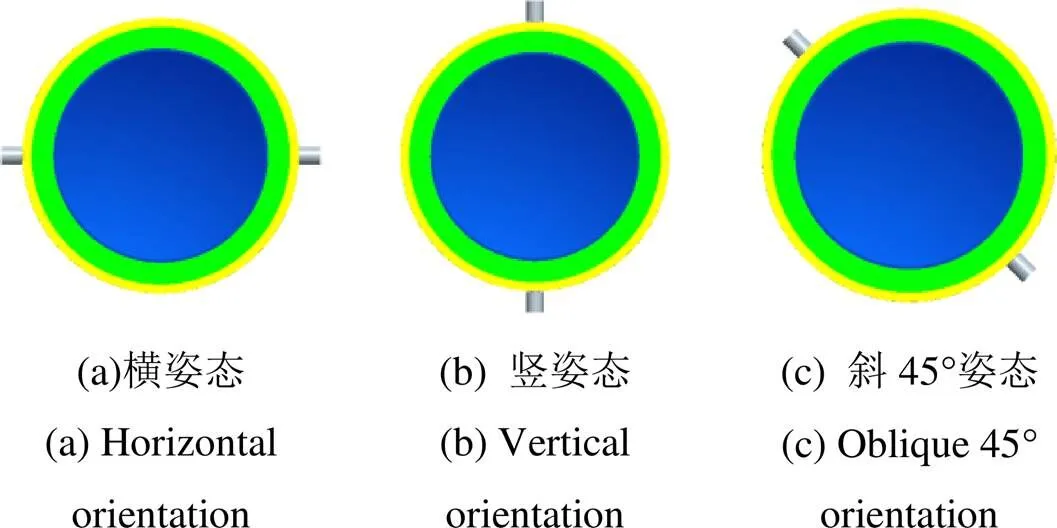
图2 三种不同运动姿态
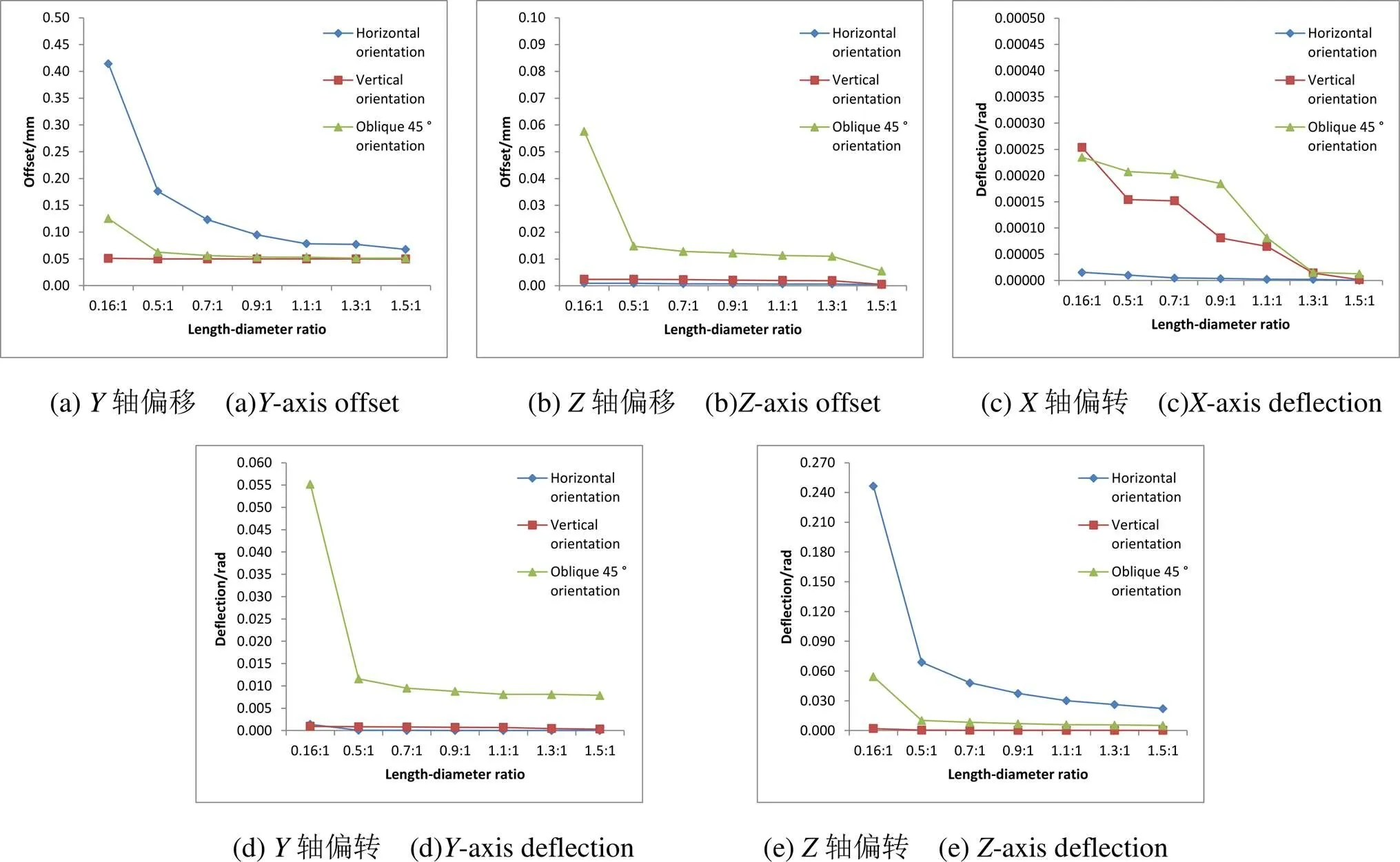
图3 不同运动姿态与不同长径比下镜片偏移与偏转
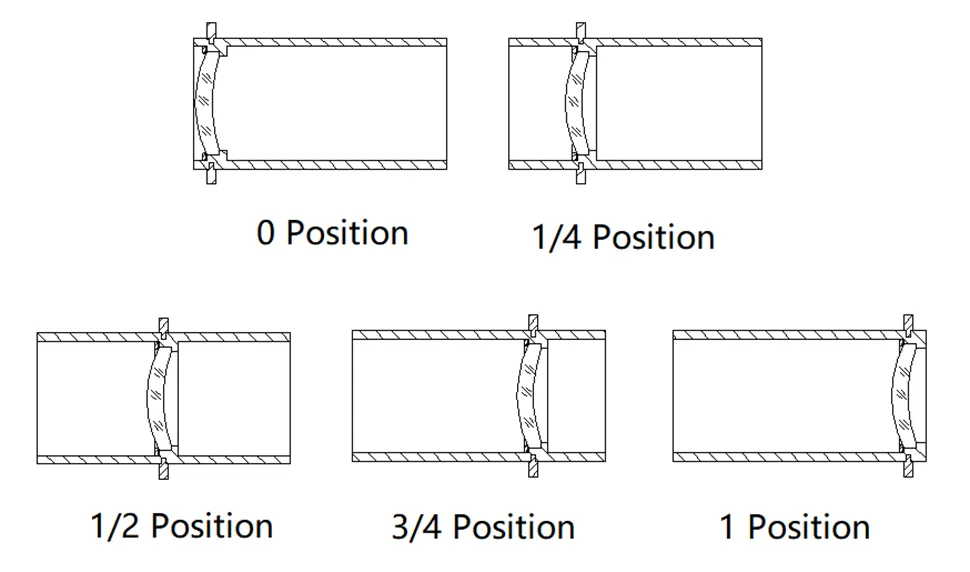
图4 导向钉与镜片位置示意图
2)竖姿态分析
由图6中可以看出镜片与导向钉位置改变时,无论在任何位置,运动镜架运动对镜片的影响主要是重力所带来的镜片轴偏移0.05mm,而轴位移也基本为零;无论从轴偏转、轴偏转和轴偏转来看,镜片的偏转基本小于0.001rad,可以忽略不计,可以根据实际情况对镜片与导向钉位置进行布置。
3)斜45°姿态分析
从图7中可以看出镜架与导向钉位置改变时,轴偏移与轴偏移量趋势曲线成交叉分布,而焦点处就在运动镜架中部;运动镜架运行时对镜片的偏转影响无论是沿轴、轴或是轴,其偏转最小的位置均在镜架的中部。因此应将镜片与导向钉尽可能布置在运动镜架中部。
2.2.3 导向钉与镜片在运动镜架截面位置不一致
根据对导向钉与镜片在运动镜架同一截面位置时的分析结果可知,镜片与导向钉位置改变时,会对镜片产生不同程度的影响,为了更进一步了解镜片与导向钉在运动镜架上布置位置不同对镜片所带来的影响,需要对导向钉与镜片在运动镜架截面位置不一致时运动镜架运动对镜片的影响进行分析。镜片与导向钉的位置关系有多种可能,并不能以镜片与导向钉的距离尺寸为分析标准,应考虑到在不同长度的运动镜架下,镜片与导向钉位置分析结果同样有效。在分析时,依然按比例选取运动镜架上5个点,分别为以镜架全长0位置处、1/4处、1/2处、3/4处和1位置处进行分析。为了增加分析的合理性,同时避免不必要的工作量,选取镜片与镜架一致时对镜片影响最小的位置,做导向钉与镜片不一致时在3种不同姿态下进行分析。
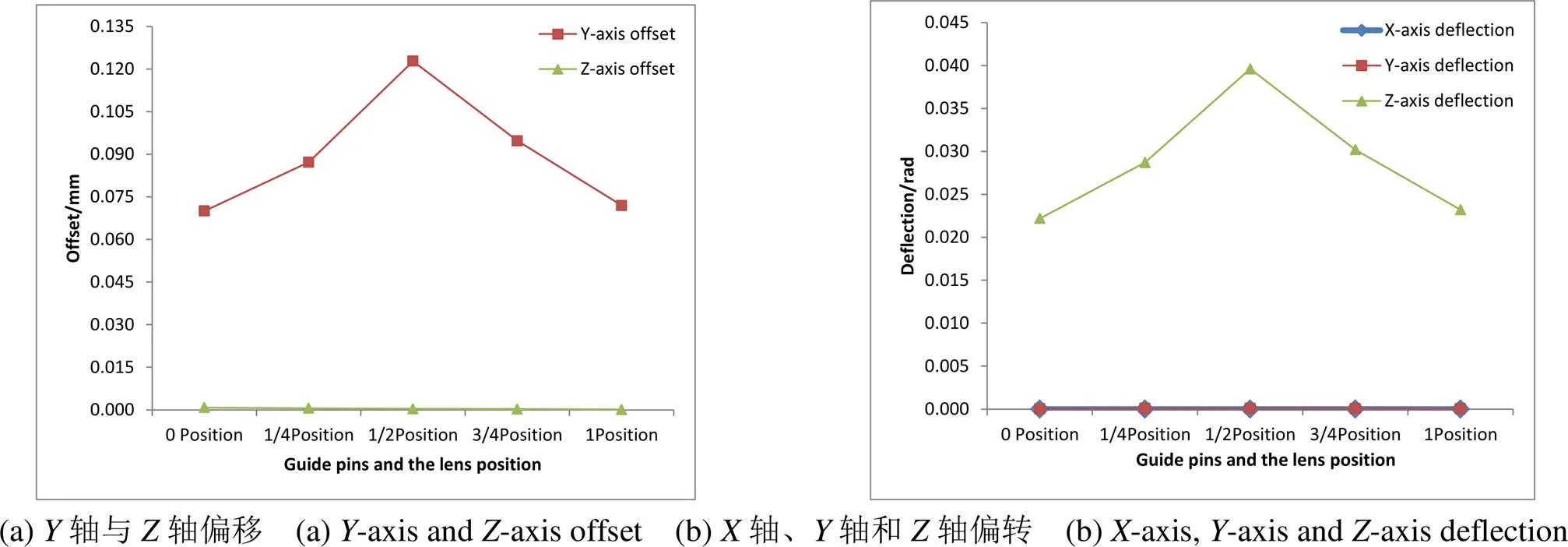
图5 横姿态镜片与导向钉不同位置镜片的偏移与偏转
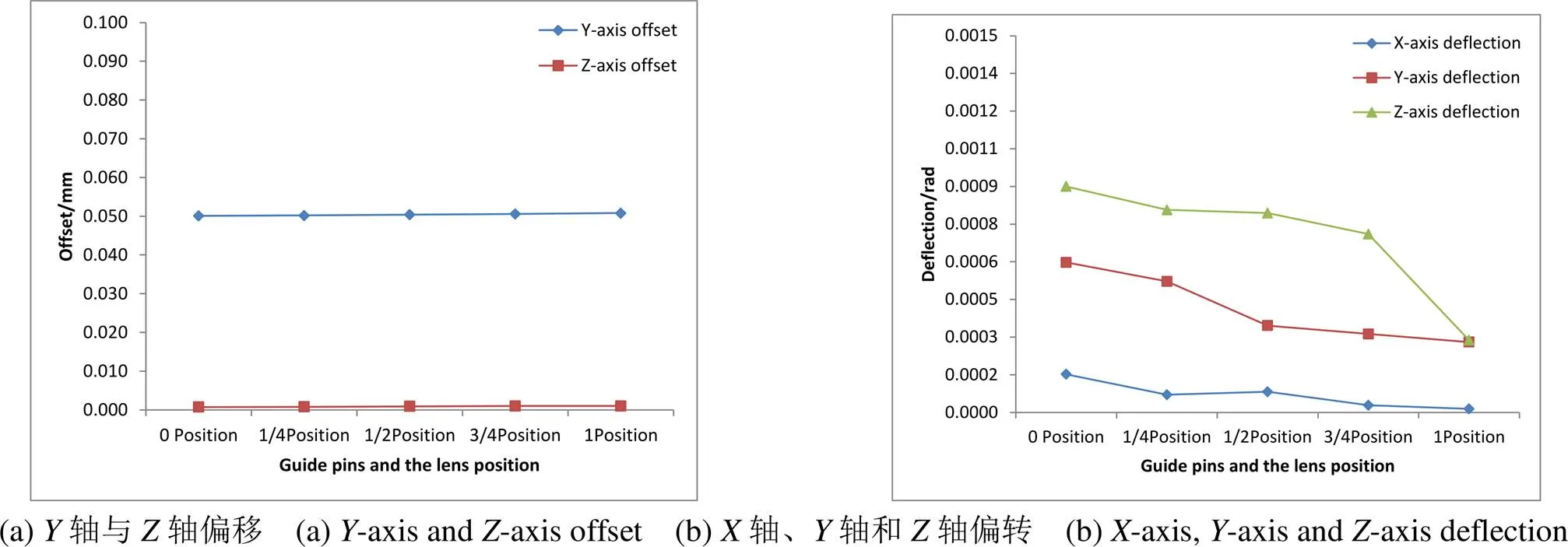
图6 竖姿态镜片与导向钉不同位置镜片的偏移与偏转
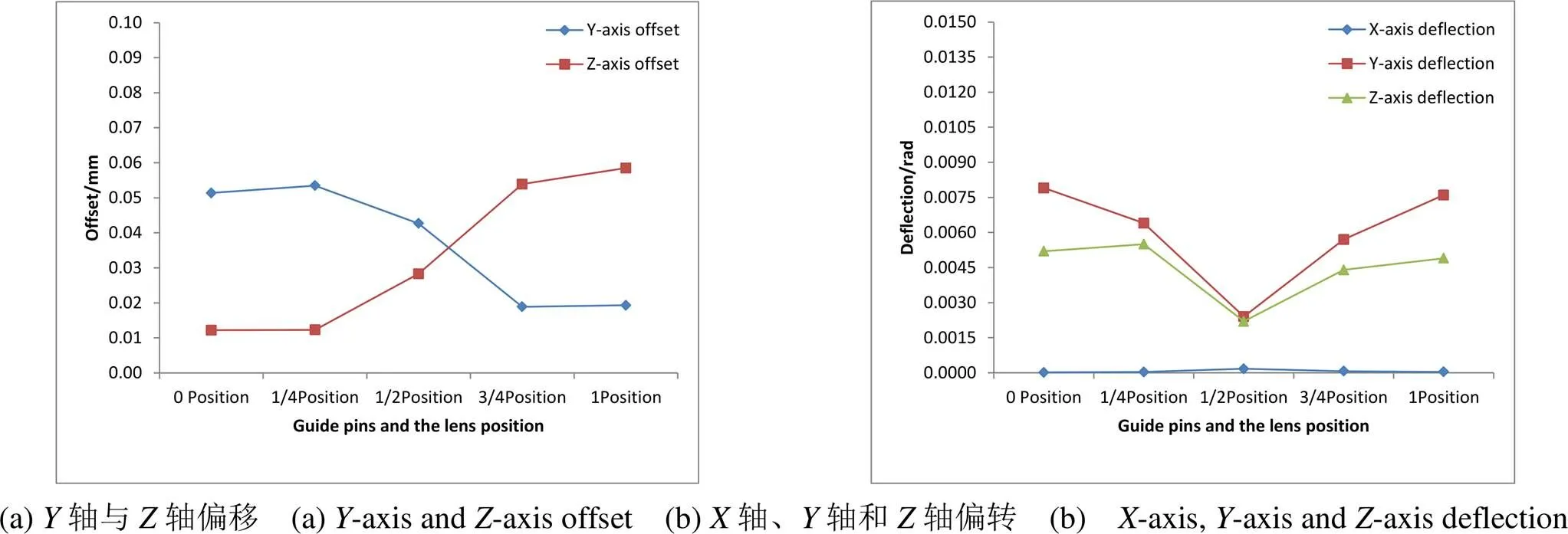
图7 斜45°姿态镜片与导向钉不同位置镜片的偏移与偏转
1)横姿态分析
导向钉和镜片在运动镜架位置一致时,在镜架0位置对镜片的影响最小,通过固定镜片改变导向钉的位置进行分析,如图8所示为镜片与导向钉在运动镜架布置位置关系示意图。
由图9可知,运动镜架运动主要影响镜片轴的偏移与轴的偏转,其中当导向钉移动到镜架1/2位置处对镜片影响最大,相较于导向钉布置在0位置与1位置处的影响最小。
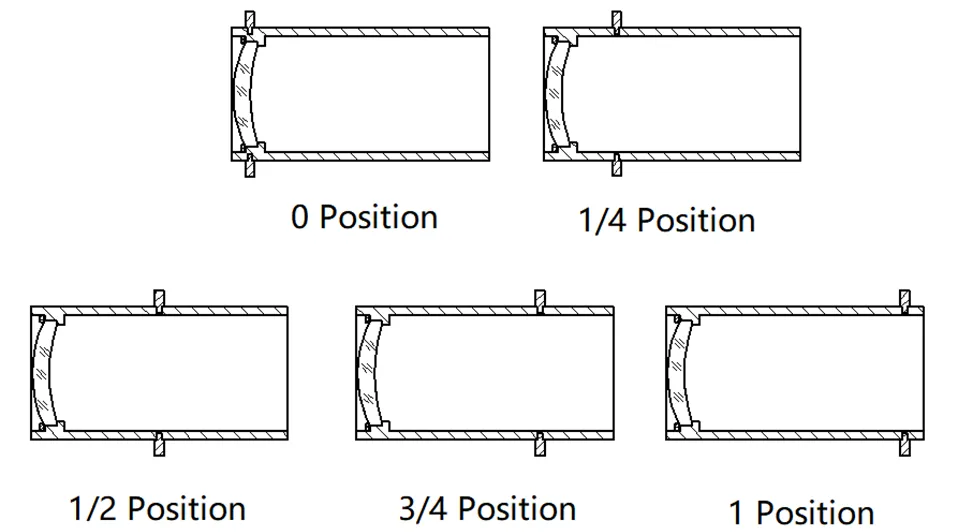
图8 横姿态导向钉与镜片位置不一致示意图
2)竖姿态分析
导向钉和镜片在运动镜架位置一致时,布置在运动镜架任何一处,对镜片的影响都相对较小,因此,采用镜片在0位置处固定,导向钉移动到其它位置的情况下进行分析。其分析模型示意图如图10所示。
由图11可知,当导向钉与镜片在运动镜架位置不一致的情况下,影响镜片的依然是轴的偏移;其中镜片的偏转均小于0.0009,可以忽略不计。因此导向钉位置的移动对镜片的偏移与偏转影响微乎其微。
3)斜45°姿态分析
导向钉和镜片在运动镜架位置一致时,在镜架1/2位置运动镜架运动对镜片的影响最小,通过固定镜片在1/2位置处,改变导向钉的位置,来进一步分析导向钉与镜片位置不一致时运动镜架运动对镜片的影响。如图12所示斜45°姿态导向钉与镜片位置关系示意图。
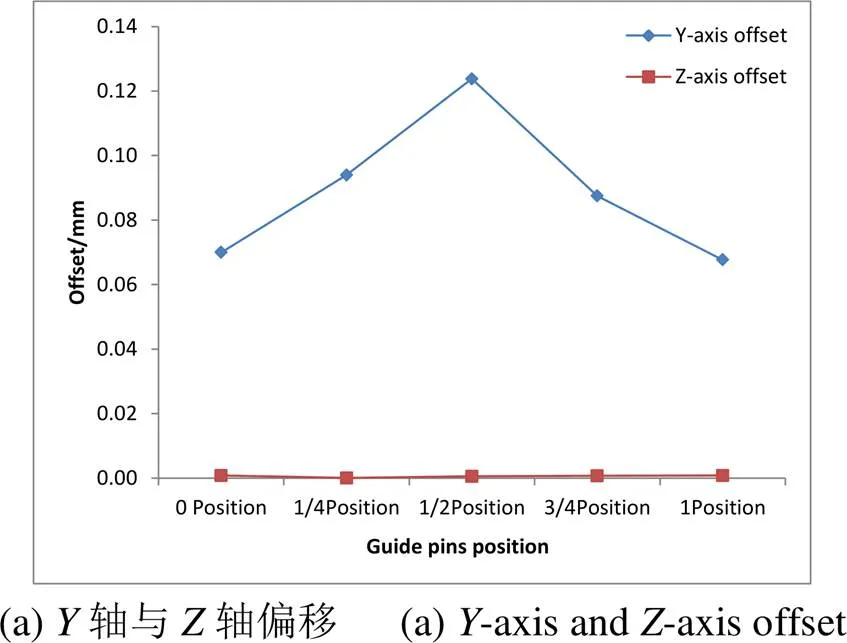
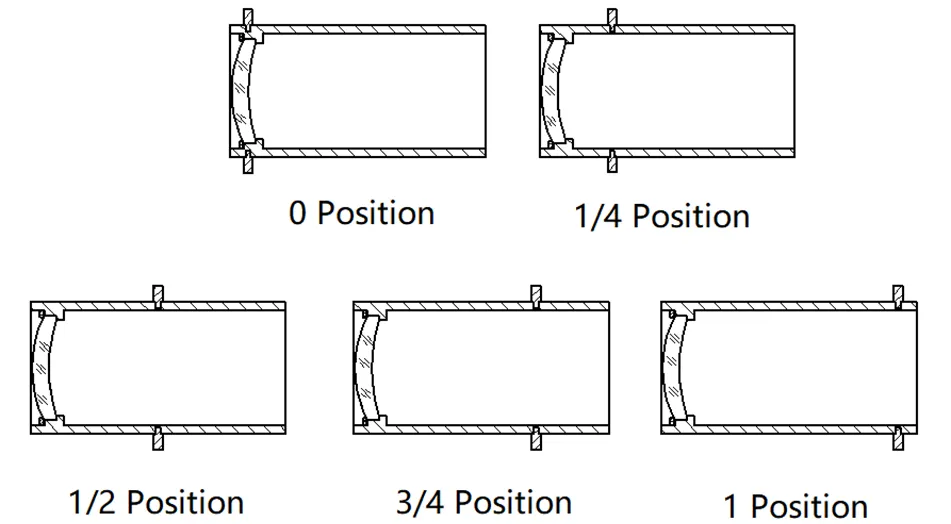
图10 竖姿态导向钉与为镜片位置不一致示意图
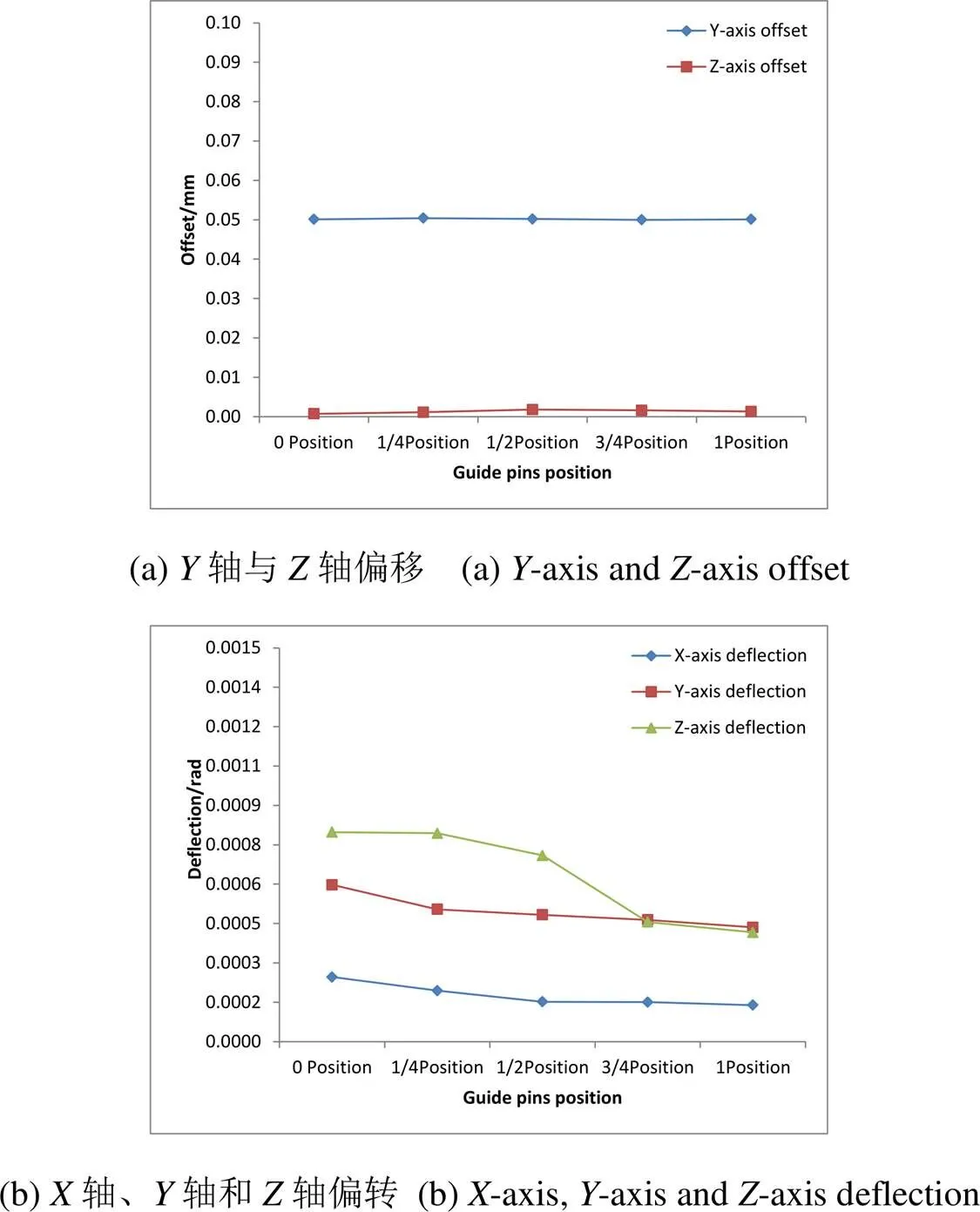
图11 竖姿态不同导向钉位置镜片的偏移与偏转
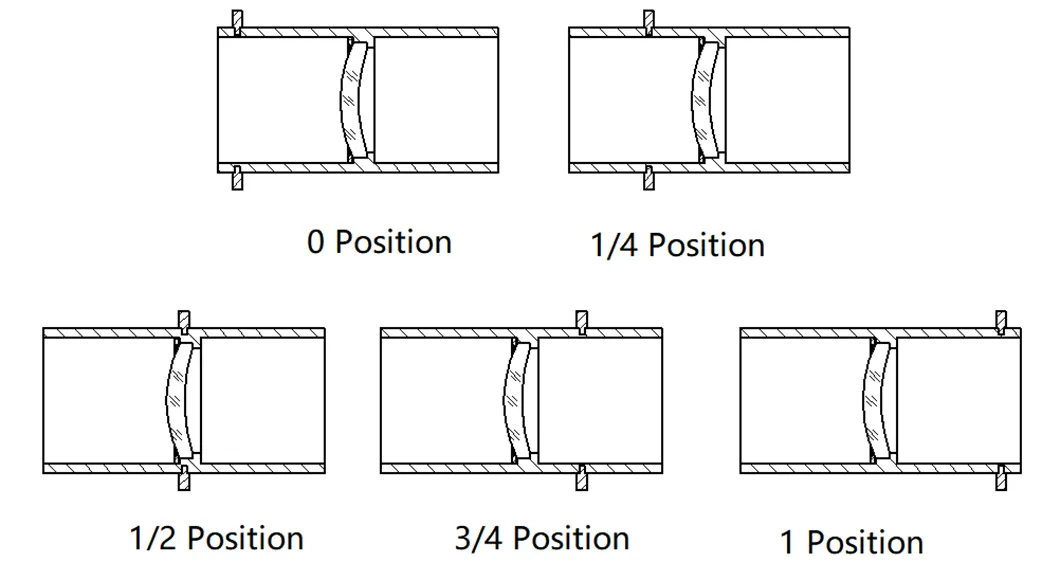
图12 斜45°姿态导向钉与为镜片位置不一致示意图
从图13中可以看镜片轴偏移与轴偏移量趋势曲线成交叉分布,而焦点处就在运动镜架中部;与此同时,观察镜片偏转图可以发现,运动镜架运行时对镜片的偏转影响无论是沿轴、轴或是轴,其偏转最小的位置均在运动镜架的中部。因此应将镜片与导向钉尽可能布置在运动镜架中部。
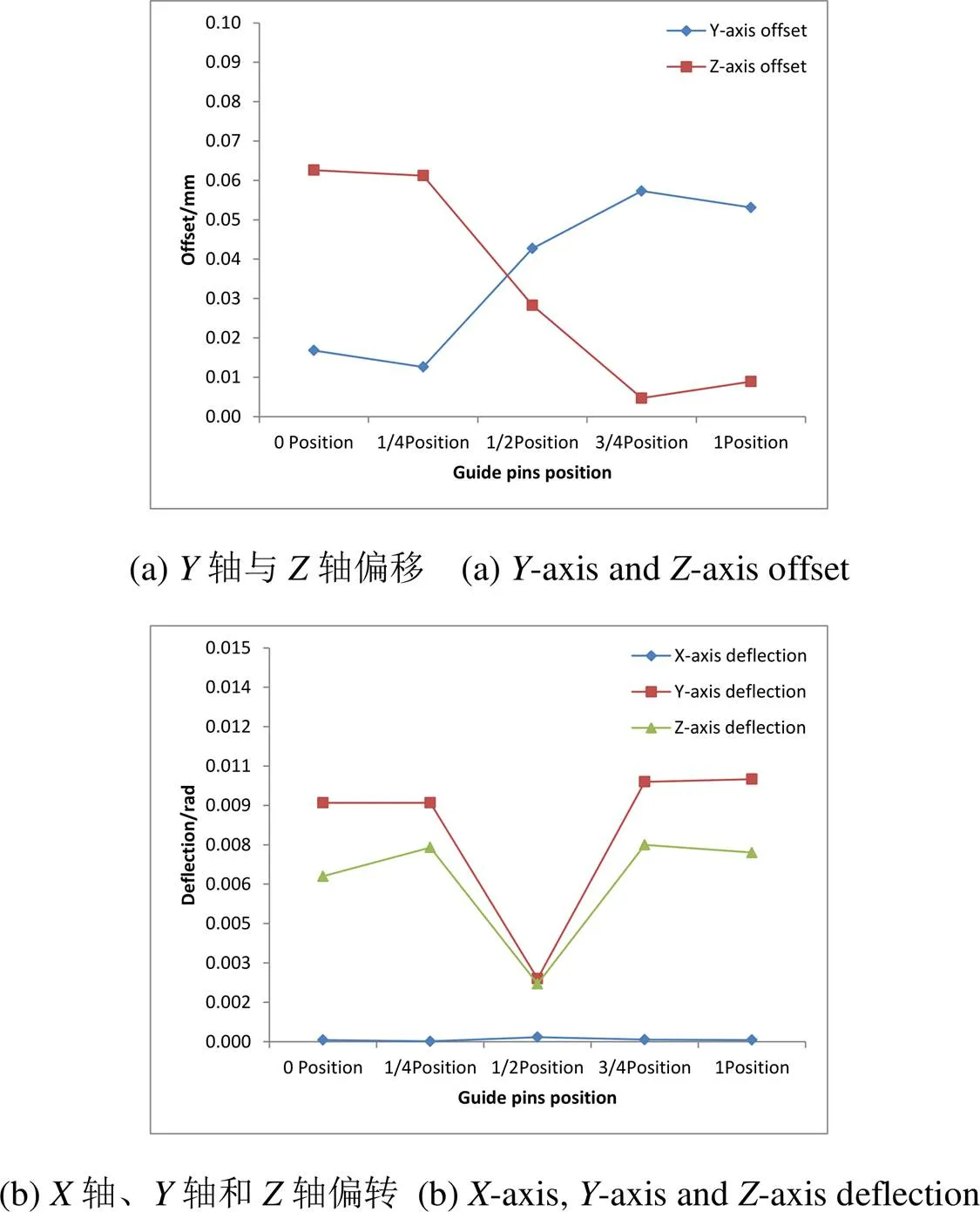
图13 斜45°姿态不同导向钉位置镜片的偏移与偏转
3 嵌套式导向机构运动分析
根据以上分析结果,了解了运动镜架在运动过程中对镜片的影响,但将以上分析结果直接应用在实际运动镜架设计当中,会出现如下问题:
1)在连续变焦镜头当中,各个镜片之间的距离已经被严格确定,在结构设计时,为了降低运动镜架运动过程中对镜片的影响使运动镜架加长,导致运动镜架之间发生干涉现象。
2)虽然运动镜架加长可以使镜片在运动过程更加平稳,但是随着长度的增加镜架重量增加,启动所需要的转矩也随之增大。
3)由于镜架的加长不当,也会导致镜头在变焦过程当中,镜架发生遮光现象,镜头无法正常使用。
针对以上问题,采用相互嵌套形式的变焦运动镜架,如图14所示。
对于嵌套形式运动镜架设计是否合理,仍然需要以运动镜架运动对镜片造成的影响来判断。通过对改进后的镜架与改进前的进行比较分析,来判断运动镜架改进是否成功。
为了充分说明改进运动镜架的优劣,选取每种姿态下的最优形式进行对比分析。其分析数据如表2~4所示。
通过对改进前后运动镜架在不同姿态运动对镜片的影响对比分析可以发现,相比较横姿态与竖姿态,对于运动镜架的改进后,对镜片的影响基本上不变;但在改进后的镜架以斜45°姿态运动时,其对镜片的偏移与偏转都有不同程度增大,但也均在光机系统设计所规定的公差内。因此可以判断,改进后的运动镜架满足使用需求。
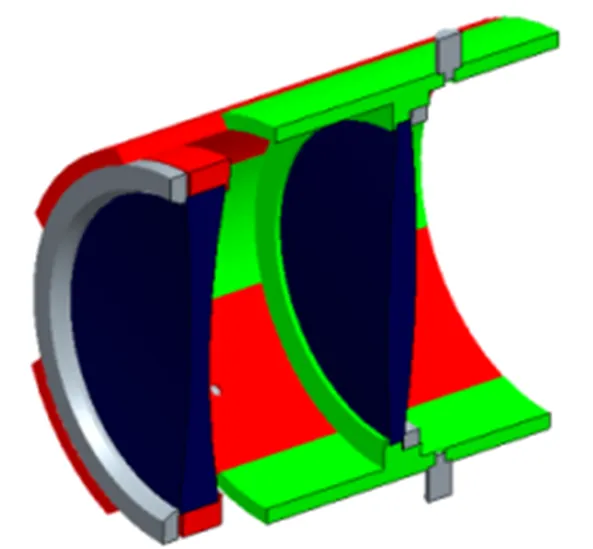
图14 嵌套结构示意图

表2 横姿态运动镜架改进对比

表3 竖姿态运动镜架改进对比

表4 斜45°姿态运动镜架改进对比
而对于镜架加长所带来的另为一个问题就是运动镜架启动所需的转矩增大,以横姿态启动转矩为例,如图15所示为改进前后的运动镜架所需要启动转矩,可以发现运动镜架在改进后,运动镜架启动时所需要的转矩大幅降低,从225N×mm降低到了140N×mm。因此也可以说明运动镜架在改进后,满足预期设想要求。
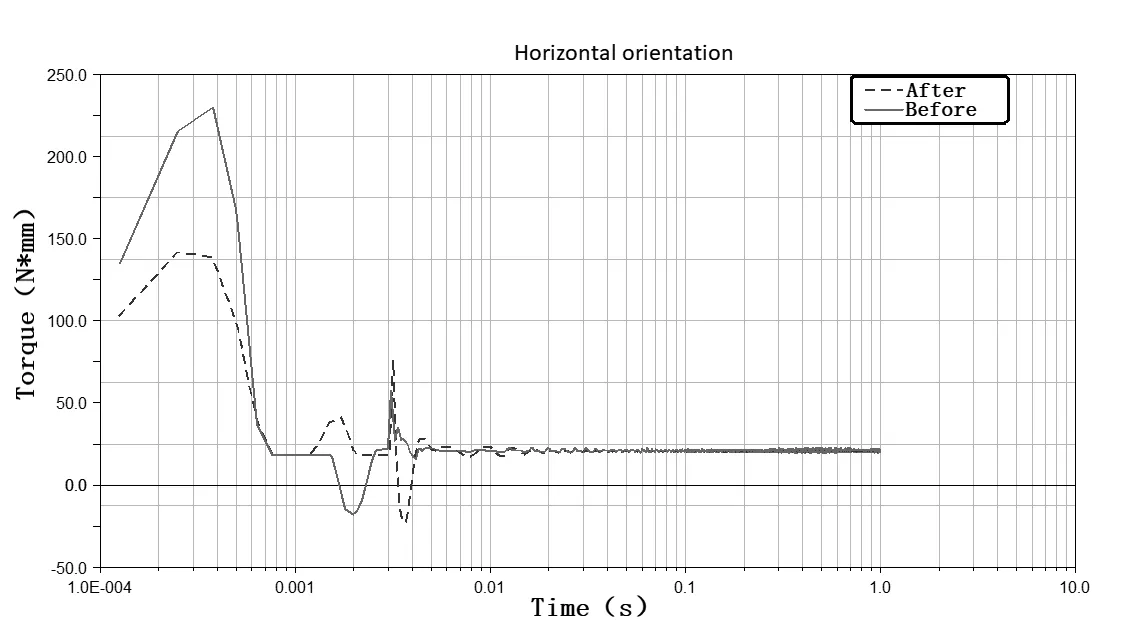
图15 运动镜架改进前后启动转矩对比
通过以上对导向机构的分析可以发现,嵌套式运动镜架可以满足设计要求,在运动镜架设计时可以采用嵌套形式,以避免运动镜架加长所带来的相关问题。
4 红外连续变焦镜头变焦分析
根据光学系统要求,并依照上述分析结果对红外连续变焦镜头进行相关设计。将镜头变倍组运动镜架设计为竖姿态运动,补偿组运动镜架设计为斜45°姿态运动,调焦组设计为运动镜架竖姿态运动,导向钉与镜片按分析结论布置。连续变焦镜头的整体装配以及三维剖视图如图16~17所示。
将变焦镜头模型导入多体动力学软件ADAMS,对所设计的镜头进行运动学仿真分析,并记录镜头在运动过程当中,变倍组镜片、补偿组镜片以及调焦组镜片在运动过程当中的偏移量与偏转量,以验真是否满足使用要求。经过仿真得出如下结果,如表5所示。

图16 连续变焦镜头的整体装配图
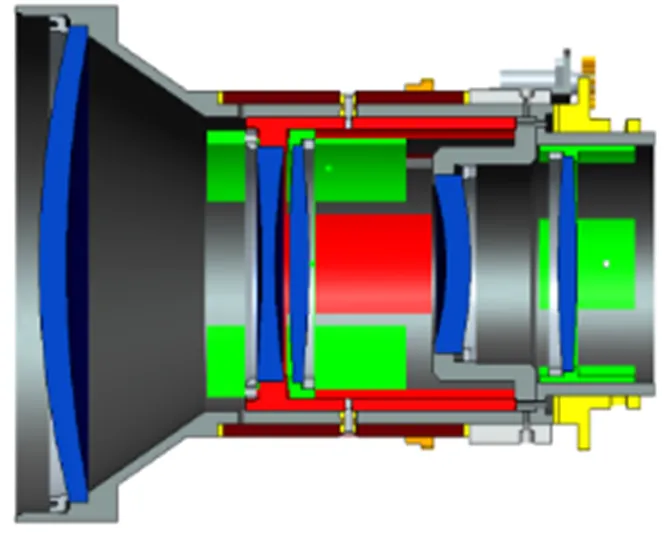
图17 红外连续变焦镜头整体结构剖视图
由表5可知,变倍组、补偿组和调焦组在变焦过程中偏移量均在0.1mm以内,偏转量均在0.05以内,导向机构满足设计要求。
光学系统的好坏可以通过MTF来衡量,若调制传递接近60%即满足光学系统基本使用要求。因此将红外连续变焦镜头在变焦过程当中镜片的偏移量与偏转量导入CODE V光学设计软件,生成MTF来判断镜头的设计成功与否。如图18所示,为镜头结构设计后在30mm、80mm和150mm焦距下的MTF图与成像图。
通过对所生成MTF观察可知,均在60%左右,同时在相同焦距下成像保持清晰,最终可以认为本次对红外连续变焦镜头导向设计满足使用要求。
5 总结
本文基于ADAMS多体动力学分析软件对红外连续变焦镜头滑动导向机构的运动姿态、长径比、镜片与导向钉位置以及嵌套结构形式导向机构进行运动仿真分析,得出以下结论:
1)对运动镜架在横姿态、竖姿态和斜45°姿态长径比运动分析,发现竖姿态相比较其它两种姿态来说对镜片的影响相对较小,斜45°姿态其次;同时运动镜架的长径比应尽量满足0.9:1以上,才能基本满足成像要求,由此为设计导向机构提供相关依据。
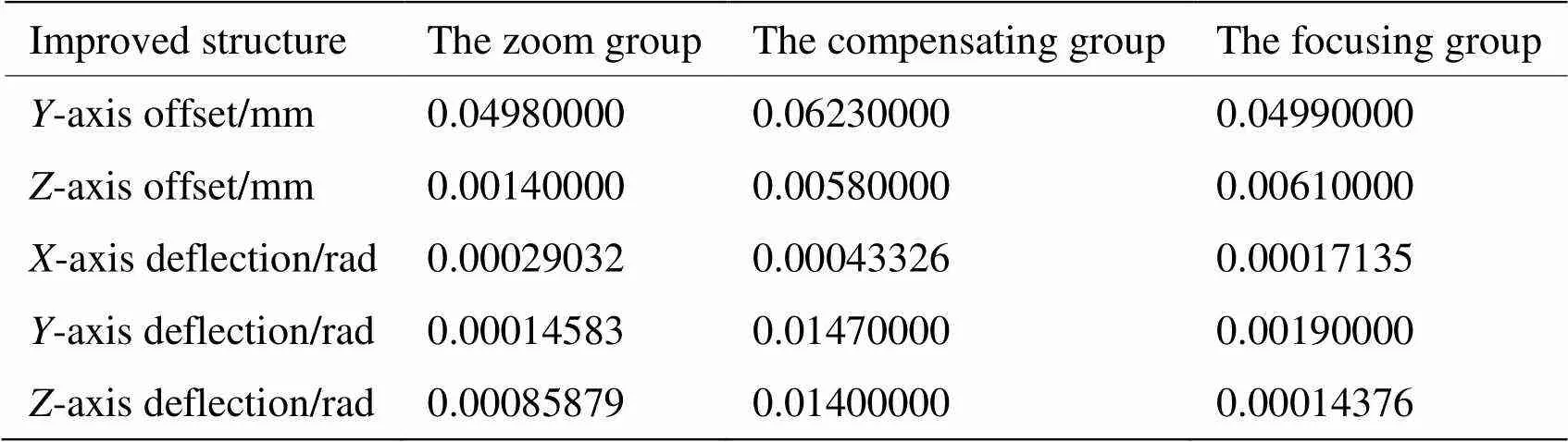
表5 红外连续变焦镜头运动过程镜片偏移与偏转
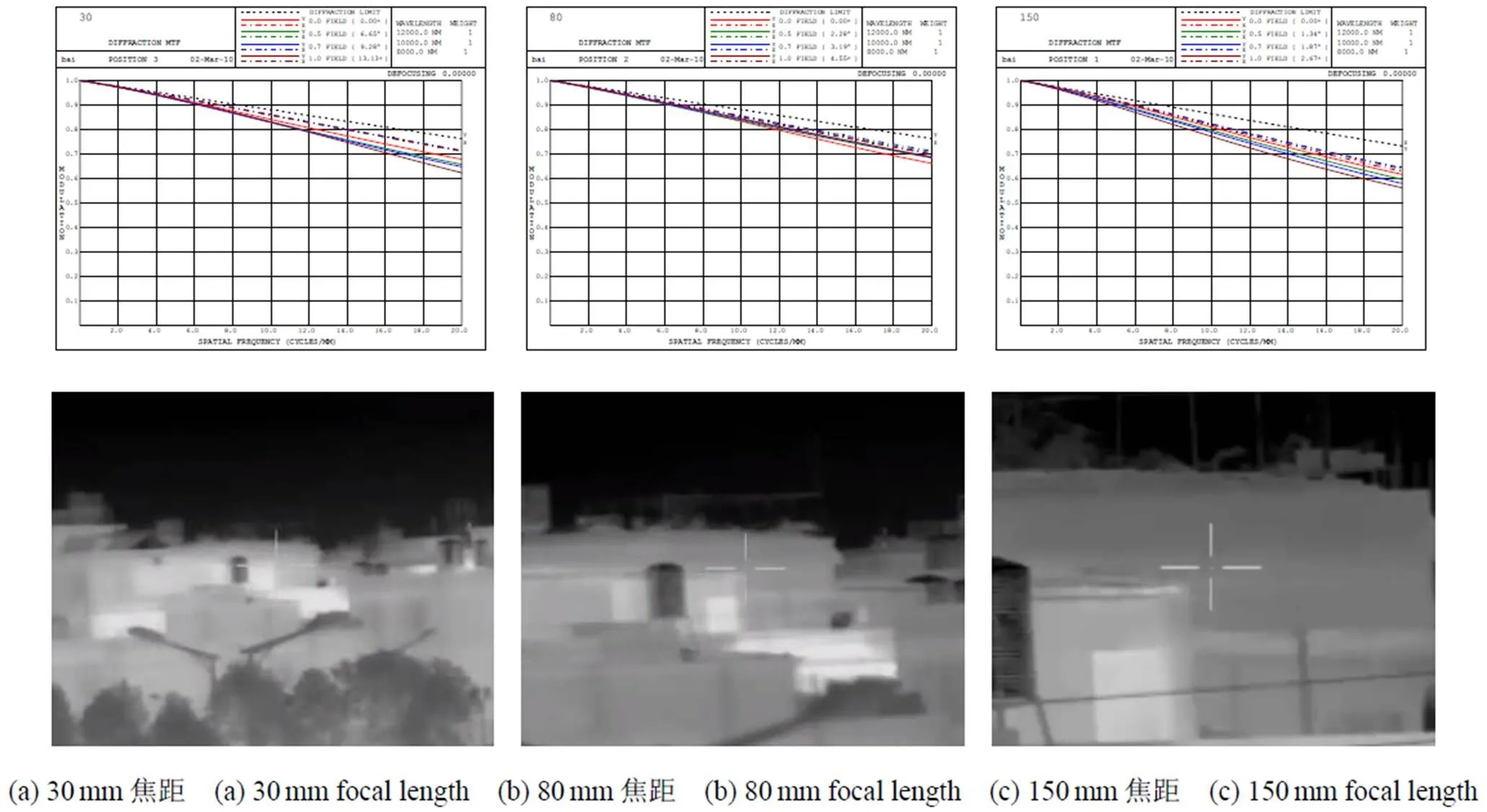
图18 不同焦距下调制传递函数与成像图
2)在加长的运动镜框分析基础上,对镜片与导向钉在运动镜框上不同位置时,运动镜框运动对镜片的影响进行分析发现:当横姿态时,镜片与导向钉布置在运动镜框的两端对成像的影响较小;当竖姿态时,镜片与导向钉的布置位置为镜片的影响较小;当斜45°姿态时导向钉与镜片应尽量保证同时布置在运动镜框的中部,以提高成像质量。因此可以根据以上分析结果对镜片与导向钉的位置进行布置。
3)通过对嵌套结构形式与普通形式导向机构进行对比,发现嵌套形式导向机构,满足运动过程对镜片的影响小而且不会发生遮光现象,同时降低了运动镜框在启动时所需转矩;并通过对采用嵌套结构形式导向机构连续变焦镜头MTF进行证明了嵌套结构的可行性,因此嵌套结构形式导向机构具有一定的推广应用价值。
[1] 张治中, 李晓惕. 变焦距镜头导向机构的类型[J]. 光学精密工程, 1991(5): 50-55.ZHANG Zhizhong, LI Xiaoti. Types of guide devices of the zoom lenses[J]., 1991(5): 50-55.
[2] 刘铁军, 孙宝玉. 滑动摩擦式变焦距镜头结构误差分析[J]. 航空精密制造技术, 2011, 47(3): 16-19. LIU Tiejun, SUN Baoyu. Error Analysis of glide friction structure for zoom lens[J]., 2011, 47(3): 16-19.
[3] 陈立平. 机械系统动力学分析及ADAMS应用教程[M]. 北京: 清华大学出版社, 2005.
CHEN Liping.[M]. Beijing: Tsinghua University Press, 2005.
[4] 杨亮. 紧凑型连续变焦红外镜头的结构设计及分析[D]. 昆明: 昆明理工大学, 2013.
YANG Liang. Structural design and analysis of compact continuous zoom infrared lens[D]. Kunming: Kunming University of Science and Technology, 2005.
[5] 李增刚. ADAMS入门详解与实例[M]. 第2版, 北京: 国防工业出版社, 2014.
LI Zenggang.[M]. 2nd, Beijing: National Defense Industry Press, 2014.
[6] Paul R Yoder, 约德, 周海宪, 等. 光机系统设计[M]. 北京: 机械工业出版社, 2008.
Paul R Yoder, YUE De, ZHOU Haixian, et al.[M]. Beijing: Mechanical Industry Press, 2008.
Kinematic Analysis of Sliding Guide Mechanism of Infrared Continuous Zoom Lens
LU Wenlong1,LI Shan2,JIA Yuchao1,LI Hongbing1,LUO Hong1,WANG Caiping1,SUN Xing1,ZHU Jun1
(1. Yunnan KIRO-CH Photonics Co. Ltd, Kunming 650217, China; 2. Faculty of Mechanical and Electrical, Kunming University of Science and Technology, Kunming 650500, China)
The movement of the sliding guide mechanism causes an offset and deflection of the lens due to the clearance fit between the sliding guide mechanism and drawtube. Based on the theory of flexible body kinematics, the motion simulation of the sliding guide mechanism at different motion postures, length-diameter ratios and arrangement positions of the guide pin and lens, was analyzed, which influenced the lens offset and deflection. The nested steering mechanism was simulated and analyzed to verify the feasibility and meet the practical requirements of the zoom optical system. Accordingly, the infrared continuous zoom lens sliding guide mechanism was designed and fabricated. Subsequently, the zoom process of the lens was imaged. It was demonstrated that this simulation analysis provides an effective method to enable the structural design and research of infrared zoom lens.
infrared continuous zoom lens,the sliding guide mechanism,kinematics simulation
TH216
A
1001-8891(2020)05-0447-08
2018-09-01;
2019-05-10.
路文龙(1991-),男,助理工程师,硕士,主要从事红外光电系统总体设计方面的研究,E-mail:luwlchn@163.com。
猜你喜欢
大电机技术(2022年3期)2022-08-06
兵器装备工程学报(2021年12期)2022-01-11
黑龙江八一农垦大学学报(2021年6期)2021-12-30
河南建材(2021年9期)2021-08-27
小资CHIC!ELEGANCE(2021年18期)2021-07-28
农村百事通(2018年4期)2018-05-25
摄影之友(影像视觉)(2018年1期)2018-03-22
航空模型(2016年10期)2017-05-09
大众摄影(2014年9期)2014-09-17
英语学习·新锐空间(2013年2期)2013-05-23
