
基于阿基米德螺线的三导线环形磁导引*
2020-06-04 09:45凌云龙汪川张海潮
物理学报 2020年10期
凌云龙 汪川 张海潮†
1) (中国科学院上海光学精密机械研究所, 量子光学重点实验室, 上海 201800)2) (中国科学院大学, 北京 100049)(2020年2月25日收到; 2020年3月20日收到修改稿)
提出了一种三线阿基米德螺线结构产生环形磁势阱以囚禁中性原子的导引方案. 该结构具有 π /3 旋转对称性, 由三根导线组成. 每根导线包含一对由圆弧连接的阿基米德螺线, 且具有中心对称性. 这种结构能够避免电流引线端导致的导引缺口问题. 当加载直流电时, 可以形成闭合的环形磁导引, 但导引中心存在磁场零点. 利用时间轨道平均势原理, 在直流电的基础上再加载交流调制, 对调制电流的参数进行分析和讨论后给出优化方案, 使环形磁导引中心无磁场零点, 同时平滑了环形磁导引中心磁场强度在角向上的起伏变化. 该结构可以刻蚀在芯片表面, 具有生产工艺简单、调制稳定等优点, 有利于实现导引型原子芯片陀螺仪.
1 引 言
原子陀螺仪是用于测量旋转角速度[1−3]的原子干涉仪, 其原理是利用Sagnac 效应[4]和原子干涉实现在惯性空间内对载体角速度信息的探测, 具有高精度、高灵敏度和高分辨率的特点, 在惯性导航领域的发展前景十分广阔. 作为原子陀螺仪重要的发展方向之一, 导引型原子陀螺仪[5−7]利用物质波导约束原子, 避免了重力及其他杂散场的影响,相比自由空间型原子陀螺仪[8−11]具有更长的探询时间. 实现中性原子的囚禁势阱主要有两种方式,即光势阱和磁势阱. 因为基于磁势阱的原子导引可刻蚀在半导体芯片上, 所以磁导引型原子陀螺仪有望在更小尺寸上实现, 在小型化和集成化方面颇具潜力.
磁导引型原子陀螺仪面临的首要问题是如何形成导引中心无零点且闭合光滑的环形磁导引. 为此, 国内外研究者提出了很多环形磁导引方案.2001年, Sauer 等[12]利用同轴圆环导线产生了直径为 2cm 的环形磁导引, 实现了冷原子的装载.2004年, Wu 等[13]利用导线、箔纸等材料制作了“跑道型”磁导引结构, 实现了数量为 107量级的冷原子在导引中的双向传播. 2005年, Gupta 等[14]利用四个同轴磁场线圈产生直径为 1.2—3 mm 的环形四 极磁阱, 原子 在导引中传播了 1 s . 2006年,Arnold 等[15]利用两对线圈配合一根轴向直导线产生了直径为 10 cm 的环形磁导引, 并利用磁阱将原子团分束. 2009年, 美国Baker 等[16]提出七线布局的双层原子芯片方案, 理论上通过切换上下两层芯片的电流可以实现无缺口的环形磁导引.2012年, Pritchard 等[17]利用均匀的交变磁场在铜环上诱导产生了半径为 5mm 的环形磁导引.2012年, West 等[18]提出压电驱动纳米磁性材料结构产生环形磁导引的方案. 2014年, Garraway小组提出了利用缀饰诱导产生环形磁导引[19]和准一维磁导引[20]的方案. 2015年, 我们小组提出了基于原子芯片的单线阿基米德螺线方案[21,22]和基于垂直引线和交流调制的三环线方案[23]. 这两种方案都存在不完善的地方: 单线阿基米德螺线方案涉及到的偏置线圈体积和电感很大, 使得整个系统的尺寸、功耗很大, 对电路也提出了很高的要求,不利于小型化和工程化; 垂直引线的三环线方案涉及到硅通孔技术, 在国内发展尚不成熟, 原子芯片[24,25]的垂直引线存在加工难度. 所以, 需要设计一种新的环形磁导引结构.
本文提出一种三线阿基米德螺线环形磁导引结构, 解决了通常环形磁导引中由于引线端所导致的导引缺口问题. 基于时间轨道平均势原理(timeaveraged-orbiting potential, TOP)[26], 对三线阿基米德螺线结构加载交流调制, 使导引中心的磁场强度不为零, 解决了环形磁导引中心的磁场零点问题; 同时平滑了环形磁导引在角向的磁场起伏, 形成了闭合光滑且中心无零点的环形磁导引.
本文的组织结构如下. 首先介绍了基于原子芯片的三线阿基米德螺线环形磁导引的布线结构, 分析了三线阿基米德螺线布线结构的优势; 其次, 基于时间轨道平均势的原理, 讨论了交流调制对环形磁导引的物理作用; 之后, 对三线阿基米德螺线结构加载交流调制产生的环形磁导引的参数进行具体的分析和讨论; 最后给出本文的主要结论.
2 三线阿基米德螺线结构
理想的环形磁导引可以基于理想同心三环线或四环线结构[27], 通过对导线加载相应的交流调制[28], 可以产生闭合光滑的且势阱中心无零点的环形势阱, 如图1 所示. 图1(a)是理想的三环线布线结构, 图1(b)是相应的磁势阱.
显然, 图1(a)所示的三环线布线结构实际上是难以实现的. 在真实的实验过程中, 如果要加载电流, 总是需要引线端的. 于是, 简单的布线结构往往会由于三根引线端集中在一处而导致相应的环形势阱有缺口, 很难形成封闭的环形导引. 尽管文献[23]采用垂直引线的方法使得电流的流入端和流出端靠近而避免了环形势阱的缺口, 但是该方案涉及到微米尺度的硅通孔技术, 这增加了半导体芯片的加工难度. 因此, 我们需要设计一种新的环形磁导引结构, 既可以避免导引的缺口问题, 又易于芯片加工. 我们的研究发现, 引入相互错位的阿基米德螺线的布线结构就能够达到上述目的.

图1 (a)理想三环线结构, 其中箭头表示电流方向;(b)理想环形磁导引的磁场分布示意图, 图中的蓝色圆环部分为环形磁导引Fig. 1. (a) The ideal structure of the three concentric ring wires. The arrows represent the direction of currents;(b) The magnetic field intensity distribution of the ideal ring magnetic guide. The blue circle marks the ring magnetic guide.
阿基米德螺线在极坐标系 (θ,r) 下的表达式为

其中a为阿基米德螺线的起始半径,b为螺线半径相对于角度的变化率, 即 dr/dθ. 采用阿基米德螺线结构可以避免引线端集中分布导致的缺口问题.当按照特定的方式排列, 阿基米德螺线可以形成类似三环线的结构, 产生环形势阱[21,22].

图2 三线阿基米德螺线环形磁导引的布线结构, 其中黑色实线、红色点划线和蓝色虚线分别表示三根不同的导线,每根导线的引线端分别用1, 2, 3 表示, 箭头表示电流方向,阿基米德螺线起始半径 a =5 mm , 相邻螺线的间距d =0.1 mmFig. 2. Archimedean-spiral-based three wires structure of the ring waveguide. The black solid line, the red chain-dotted line and the blue dashed line denote three different wires respectively. The input and output ports of each wire are marked by 1, 2, 3 and the arrows represent the direction of currents. The initial radius of Archimedean spirals is a=5 mm and the distance between neighboring spirals is d=0.1 mm.
我们设计的三线阿基米德螺线结构如图2 所示. 该结构主要包括三根相同的具有中心对称性构型的导线, 每根导线包含一对由圆弧连接的阿基米德螺线和两条直导线引线端, 每根导线间隔 π /3 的旋转角度交错排列在一起, 使得相邻两根阿基米德螺线的间隔相同, 且使整个结构具有以 π /3 为周期的旋转对称性. 于是, 这便巧妙地构成了六段首尾相接的三导线布局, 当加载电流后该结构便能够形成 约束中性原子的环形磁势阱.
3 形成光滑环形磁势阱的物理分析
首先分析讨论三线阿基米德螺线的几何参数.理论上, 在同样的环路面积条件下, 原子陀螺仪的灵敏度比光学陀螺仪至少高10个量级. 因此, 基于Sagnac 效应的物质波干涉仪原则上可实现独立于全球定位系统(GPS)的自主导航. 粗略的估算表明, 独立于GPS 的原子陀螺仪可测量的最小转动角速度为 2.3×10−11rad/s . 以87Rb 原子为例, 大约 7.9 mm2的环路面积即可达到最低要求. 因此,我们以10 倍于最小环路面积, 即 79 mm2作为设计三线阿基米德螺线结构的出发点. 于是选择这样的参数, 即阿基米德螺线的起始半径a=5 mm . 考虑到在距离半导体芯片表面大约 100 μm 的平面内形成环形势阱, 选择相邻螺线的间距d=0.1 mm .
数值计算表明, 对图2 所示的布线结构加载直流电后能够形成环形势阱, 详细的计算结果将在第4 节给出. 这里主要讨论采用TOP 技术的必要性. 原子在环形势阱中沿角向传播时, 环形导引中心的磁场起伏和零点都会造成原子数目的损失和物质波的退相干, 所以最理想的情况是环形势阱中心没有磁场零点并且在角向光滑. 对于理想的圆环导线结构而言(参见图1), 由于电流密度只有角向分量而无径向分量, 所以在加载直流电后理想三环线形成的环形势阱中心磁场为零. 但对于我们设计的三线阿基米德螺线结构来说, 从(1)式可看到,随着角度θ的变化, 导线在径向上有伸缩变化, 所以相应的电流密度除了在角向有分量外, 在径向也有分量. 这使得三线阿基米德螺线结构形成的环形势阱中心在绝大部分角度处具有非零的磁场值.
但是, 遗憾的是, 在加载直流电的情况下, 三线阿基米德螺线的布线方式并不能完全消除环形导引中心的磁场零点. 由于三线阿基米德螺线结构在角度方向上以 π /3 为周期变化, 使得理论上存在六个零点. 因此利用TOP方法移去导引中心的磁场零点以避免原子的损失. TOP 阱的原理是利用外加调制场, 使磁场零点沿某种轨迹旋转, 从而使环形磁导引中心的磁场不为零. 当外加的调制场频率满足特定的条件, 即远小于原子进动的拉莫频率并远大于磁阱频率时, 原子在导引中心附近沿径向感受到的是简谐势阱且导引中心的磁场强度不为零.
对三线阿基米德螺线结构同时加载直流电流和交变电流, 三根导线上加载的总电流分别为:

其中Ii和Ij分别为所加载电流的直流成分和交流调制的幅度,ωb为调制频率,ϕ为不同导线加载的交变电流的相位差. 随着角度θ的变化, 三线阿基米德螺线结构的三根导线的相对位置不断变化, 为保证三根导线的电流相位差在一个环路内的变化相同, 我们设定电流相位差ϕ=2π/3 .
我们发现, TOP 方法不但能够移除导引中心的磁场零点, 而且也可以平滑在直流情况下环形势阱极小值在角度方向上的起伏. 这就是说, 在电流值给定的情况下, 尽管环形势阱中心是磁场强度的极小值, 但在不同的角度方向上该磁场极小值并不同. 因此, 在角度方向上导引中心的磁场强度存在极大值和极小值, 两者的差值即磁场强度起伏 ∆B,可以用来表征导引中心沿角度方向的平滑度. 物理分析和数值计算表明, 在布线结构确定的情况下,平滑程度 ∆B主要由调制深度Ij/Ii决定, 如图3 所示.
从图3 中可以看到, 随着调制深度Ij/Ii的增加, 导引中心的磁场强度起伏 ∆B呈现先减后增的变化趋势. 当调制深度在Ij/Ii=0.1 左右时, 导引中心的磁场强度起伏最小: ∆B ≈0.007 mT . 这是由于调制深度Ij/Ii过小, 会导致交流调制效果不明显; 调制深度Ij/Ii过大, 会导致磁阱消失. 只有选取合适的调制深度Ij/Ii, 才能最有效地抑制导引中心的角向磁场起伏, 导引的交流调制效果才能最好.所以, 在后续的计算中将选择调制深度Ij/Ii=0.1 .根据原子芯片导线可承受的安全电流以及实验上囚禁原子的阱深需要, 作为计算例子, 选择直流电流值Ii=1 A . 于是, 调制电流的幅度自然应该选取为Ij=0.1 A .

图3 当调制频率 ω b =2π×10 kHz , 电流位相 ϕ =2π/3 ,电流直流成分 I i =1 A时, 导引中心的角向磁场起伏∆B与调制深度 I j/Ii 的关系. 当 I j/Ii =0.1时, 环形磁导引中心磁场强度的起伏最小: ∆B ≈0.007 mTFig. 3. The relation of the angular magnetic field intensity∆B of the guide center with the modulation depth Ij/Ii when the modulation frequency is ω b =2π×10 kHz , the current phase is ϕ =2π/3 and the DC part of the currents is I i =1 A . When the modulation depth is I j/Ii =0.1 , the variation of the angular magnetic field intensity is the minimum: ∆ B ≈0.007 mT .
由于加载交流调制后, 原子在环形磁导引中感受到的磁阱是时间平均势阱, 所以不同的调制频率ωb不会影响导引中心磁场强度的起伏范围. 但原子运动的绝热近似条件要求调制频率ωb应远小于原子 的拉莫频率ωL并远大于磁阱频率ωt[26], 即

其中γ为原子的旋磁比,m为原子的质量,Ui=µBmF gF Bi为对于第i个坐标轴的势能,µB为玻尔磁子,mF为磁量子数,gF为朗德因子,Bi为磁场强度在第i个坐标轴方向的分量. 当选取Ii=1 A ,Ij=0.1 A时, 导引中心的磁场强度约为B ≈0.25 mT. 在这种电流条件下, 由(3)式可知,对于|F=2,mF=2的87Rb 原子, 其拉莫频率约为ωL≈2π×5.2 MHz, 原子在磁阱中r方向和z方向上的最大振荡频率分别约为ωtr=2π×36.8 Hz ,ωtz=2π×29.3 Hz . 所以, 根据(3)式, 调制频率ωb的选择余地还是很大的, 比如可选ωb=2π×10 kHz.
综上所述, 为满足势阱在角度方向光滑的要求和原子运动的绝热近似条件, 最终确定所加载的电流的几个参数为:Ii=1 A,Ij=0.1 A ,ωb=2π×10 kHz,ϕ=2π/3 .
4 计算结果
在上述参数的条件下, 以三线阿基米德螺线结构中心为原点, 采用柱坐标系 (r,θ,z) , 对加载交流调制的三线阿基米德螺线结构产生的磁势阱进行计算和分析.
首先研究方位角固定时导引横截面的势阱情况. 不失一般性, 选定方位角度θ=π/2 .
图4 是形成TOP 阱的示意图. 加载交流调制使得导引中心的极小值(对有些方位角即为磁场零点)沿虚线轨迹旋转, 旋转轨迹在水平和竖直方向上的变化幅度分别为 0.02 和 0.03 mm .

图4 三线阿基米德螺线结构产生的环形磁导引在θ =π/2 截面上的磁场分布. 调制电流的直流成分 I i =1 A ,交 流 成 分 I j =0.1 A , 调制频率 ω b =2π×10 kHz , 电流相位差 ϕ =2π/3 . 加载交流调制后, 磁场的瞬时极小值(磁场零点)沿红色虚线旋转, 旋转轨迹在水平和竖直方向上的变化幅度分别为 0 .02 和0.03 mmFig. 4. The distribution of the magnetic field intensity in the θ =π/2 cross section of the ring magnetic guide generated by the Archimedean-spiral-based three wires structure.The DC part and the AC part of the modulation currents are I i =1 A and I j =0.1 A , respectively. The modulation frequency is ω b =2π×10 kHz . The current phase is ϕ=2π/3. After loading AC modulation, the minimum(zero point) of the magnetic field rotates along the red dashed line. The variation amplitude of the path along r and z direction are respectively 0 .02 and 0 .03 mm .
图5 给出交流调制对导引横截面磁场强度的影响. 可以看到, 加载交流调制后, 导引中心附近的磁场强度的时间平均值的改变非常明显. 在上述参数条件下, 导引中心的磁场强度由 0.12 mT 变为0.26 mT. 在导引的横截面上磁势阱在加载交流调制后从尖锐变得平缓, 即在r方向和z方向上实现了TOP 阱约束. 对于|F=2,mF=2的87Rb 原子,导引在r方向和z方向上的阱深分别约为∆Ur=739 µK 和 ∆Uz=195 μK , 磁阱频率的最大值分别约为ωtr=2π×36.8 Hz 和ωtz=2π×29.3 Hz .
现在讨论环形导引在交流调制下势阱在角向的改变情况.

图5 (a) 环形磁导引加载交流调制前(黑色实线)和加载交流调制后(红色虚线)在 θ =π/2 截面上磁场在r 方向上的分布; (b) 环形磁导引加载交流调制前(黑色实线)和加载交流调制后(红色虚线)在 θ =π/2 截面上磁场在z 方向上的分布. 加载电流的直流成分 I i =1 A , 交流成分Ij =0.1 A , 调制频率 ω b =2π×10 kHz , 电流相位差ϕ=2π/3. 加载交流调制后, 截面上的磁场最小值由0.12 mT 变为0.26 mTFig. 5. (a) The magnetic field distribution in the cross section with θ =π/2 of the ring magnetic guide along r direction before (black solid line) and after (red dashed line)loading AC modulation; (b) The magnetic field distribution in the cross section with θ =π/2 of the ring magnetic guide along z direction before (black solid line) and after(red dashed line) loading AC modulation. The DC part and the AC part of the AC modulation currents are Ii =1 A and I j =0.1 A , respectively. The modulation frequency is ωb =2π×10 kHz . The current phase is ϕ =2π/3 . After loading AC modulation, the minimum of the magnetic field intensity in the cross section changes from 0 .12 mT to 0.26 mT.
图6 为导引中心磁场强度在加载调制与否时的对比图. 在未加载交流调制而仅仅加载直流电的情况下, 随着角度θ的变化, 导引中心的磁场强度存在较大的起伏, 其变化范围大约为0.025—0.120 mT, 极大值和极小值之差为 0.095 mT . 当加上上述交流调制后, 随着角度θ的变化, 导引中心的磁场强度起伏明显变小, 导引中心的磁场强度B ≈0.25 mT , 极大值和极小值之差∆B ≈0.007 mT, 磁场起伏 的 相 对 变化约为∆B/B=2.88%. 可见交流调制改变了环形磁导引的导引中心磁场强度, 从而在本质上移除了导引中心存在磁场零点的可能性; 同时有效地抑制了环形磁导引的角向磁场起伏, 使得导引更光滑.
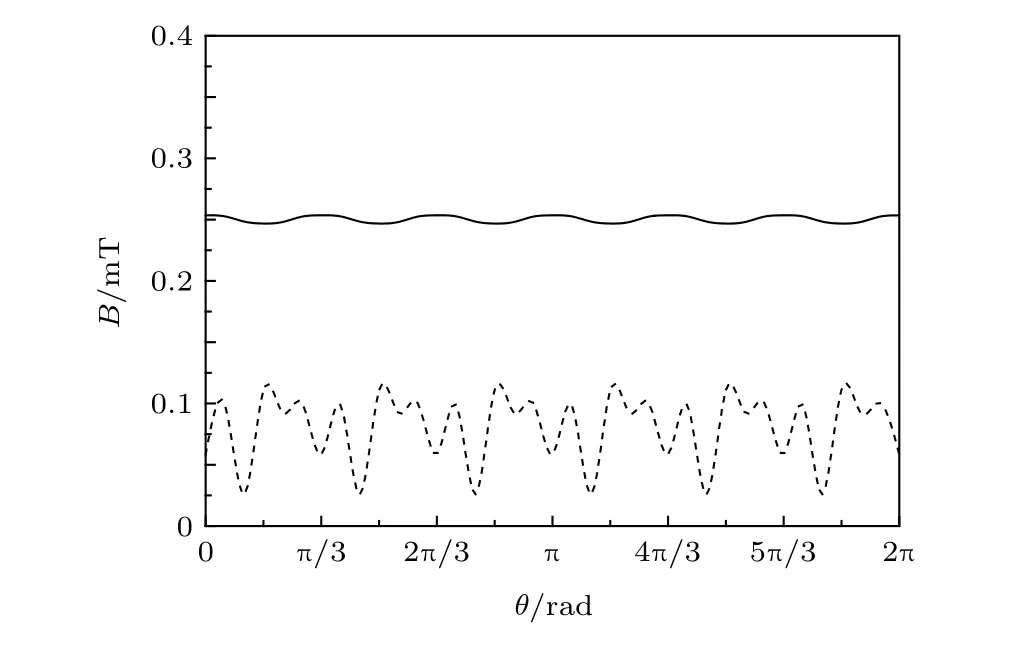
图6 在三线阿基米德螺线上单独加载直流电流时的环形磁导引(虚线)和加载交流调制(实线)后导引中心的磁场强度随着角度 θ 的变化. 图中虚线情形: 三根导线上加载的直流电流分别为 I 1 =1 A , I 2 =−1 A , I 3 =1 A , 导引中心的磁场强度的变化范围约为 0 .025—0.120 mT , 最大值和最小值之差为 0 .095 mT . 图中实线情形: 三根导线上加载电流 的直 流成分 I i =1 A , 交流成分 I j =0.1 A , 调制频率 ω b =2π×10 kHz , 电流相位差 ϕ =2π/3 , 导引中心的磁场强度 B ≈0.25 mT , 磁场起伏∆B ≈0.007 mTFig. 6. The magnetic field intensity of the guide center versus azimuthal angle θ for loading DC currents only(dashed line) and loading AC modulation (solid line), respectively. The dashed line: The DC currents applied to the three wires respectively are I 1 =1 A , I 2 =−1 A ,I3 =1 A. The variation of the magnetic field is about 0.025—0.120 mT. The difference between the maximum and the minimum is 0 .095 mT . The solid line: The DC part and the AC part of the AC modulation currents applied to the three wires are I i =1 A and I j =0.1 A , respectively.The modulation frequency is ω b =2π×10 kHz . The current phase is ϕ =2π/3 . The magnetic field intensity of the guide center is about B ≈0.25 mT . The variation of the magnetic field is ∆ B ≈0.007 mT .
为了完整起见, 图7 给出导引中心位置的空间起伏. 物理上空间起伏是由三线阿基米德螺线的布线结构决定, 与交流调制无关. 数值计算也证明了这一点. 由图7 可知, 角度θ每变化 π /3 , 导引中心的位置在r=5.15 mm ,z=0.12 mm 附近变化, 变化幅度约为 ∆r=0.015 mm , ∆z=0.005 mm , 相对于导引长度l≈2πa/6≈5.236 mm 的变化约为∆r/l=0.3% , ∆z/l=0.1% .
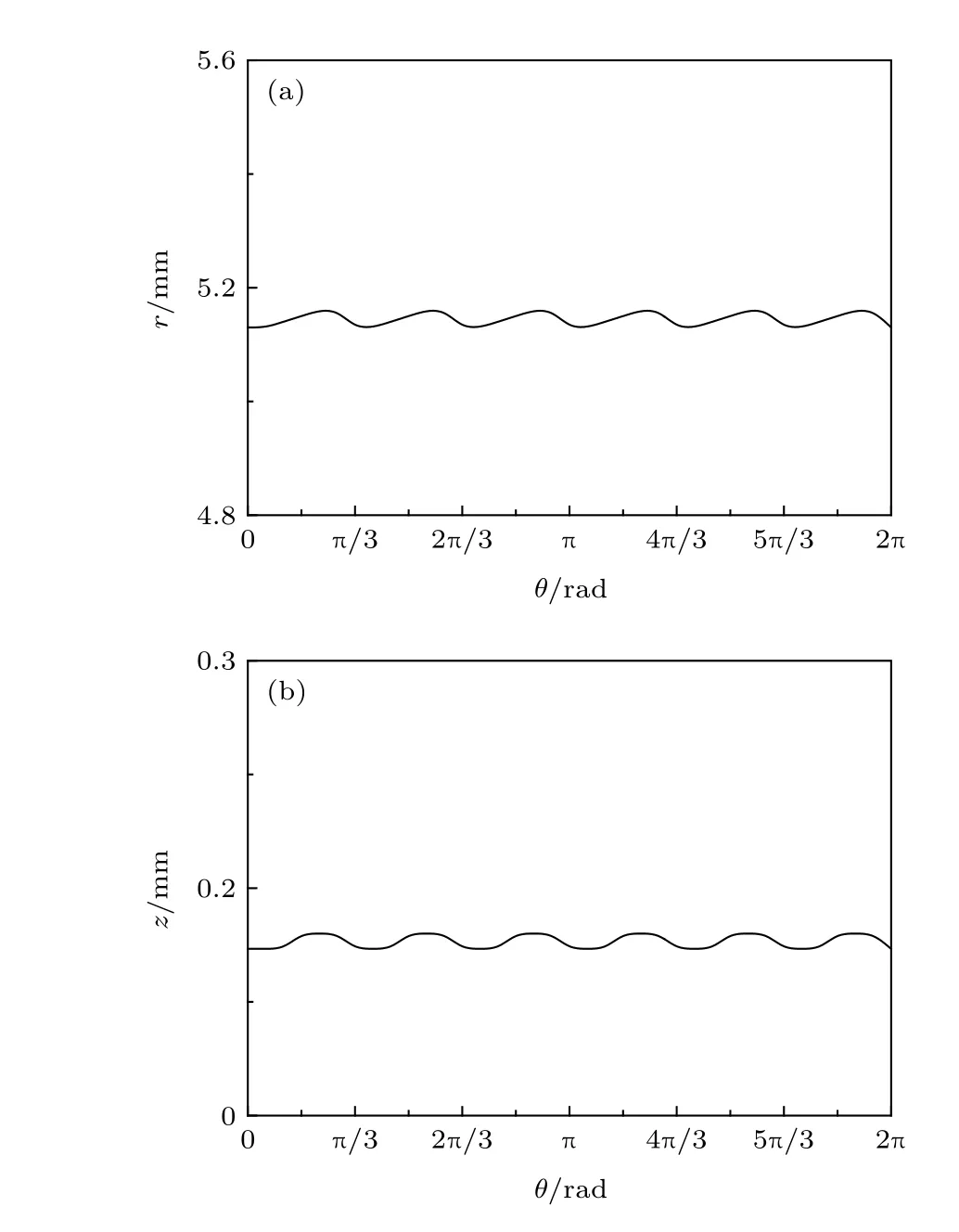
图7 对三线阿基米德螺线加载交流调制. 加载调制电流的直流成分 I i =1 A , 交流成分 I j =0.1 A , 调制频率ωb =2π×10 kHz , 电流相位差 ϕ =2π/3 . (a) (b)分别为加载交流调制后导引中心空间位置在半径r 方向和竖直z 方向上的起伏变化, 起伏变化的幅度分别为∆r =0.015 mm和∆z =0.005 mmFig. 7. Applying AC modulation to the three-wires Archimedean spirals structure. The DC part and the AC part of the AC modulation currents are I i =1 A and Ij =0.1 A, respectively. The modulation frequency is ωb =2π×10 kHz . The current phase is ϕ =2π/3 . (a) and(b) are respectively the spatial position in r direction and z direction of the ring magnetic guide after loading AC modulation. The amplitudes of variation along r direction and z direction are ∆ r =0.015 mm and ∆ z =0.005 mm , re- spectively.
图8 是加载交流调制后的三线阿基米德螺线环形磁导引在高度z=115 μm 处的磁场分布. 由三线阿基米德螺线结构形成的环形势阱即为图8 中蓝色圆环部分, 其中心强度约为 0.25 mT . 可以看出此三线阿基米德螺线环形磁导引是闭合光滑且中心无零点的环形导引, 可以导引处于|F=2,mF=2态的87Rb 原子.

图8 加载交流调制后的三线阿基米德螺线环形磁导引在高度 z =115µm 处的磁场分布. 图中的蓝色圆环部分为环形磁导引, 导引中心的磁场强度约为 0 .25 mT . 加载电流的直流成分 I i =1 A , 交流成分 I j =0.1 A , 调制频率ωb =2π×10 kHz , 电流相位差ϕ=2π/3Fig. 8. The magnetic field intensity distribution of the three-wires Archimedean spirals structure of the ring magnetic guide at z =115µm when both DC and AC modulation are loaded. The blue circle marks the ring magnetic guide and the magnetic field intensity of the guide center is about 0 .25 mT . The DC part and the AC part of the currents are I i =1 A and I j =0.1 A , respectively. The modulation frequency is ω b =2π×10 kHz . The current phase isϕ=2π/3.
5 结 论
为了实现导引中心无零点的闭合光滑环形磁导引, 提出了三线阿基米德螺线环形磁导引结构.该结构是由三根包含阿基米德螺线和圆弧的导线间隔交错在一起形成的, 具有 π /3 旋转对称性. 每根导线具有中心对称性, 其中阿基米德螺线用于形成磁导引, 圆弧导线穿过对称中心用于导通电流.这种结构避免了引线端的集中分布, 解决了导引的缺口问题, 可刻蚀于半导体芯片表面. 加载直流电流后, 可以在芯片表面产生闭合的环形磁导引. 但是导引中心在角向的磁场起伏不平, 有些角度处甚至存在磁场零点. 我们基于时间轨道平均势原理对三线阿基米德螺线结构加载交流调制, 既平滑了角向的磁场起伏, 又使得导引在横截面上获得了平缓的谐振子势阱约束. 相比国内外的环形磁导引方案, 三线阿基米德螺线结构简单, 便于在半导体芯片表面刻蚀. 三导线结构不需要设计偏置线圈, 减少了系统的体积和功耗, 有利于集成化和工程化.产生的环形磁导引对原子的束缚效果好, 对电流的要求和对原子芯片的散热要求不高, 在实验上具有可行性, 有利于实现大闭合环路面积的高精度、高可靠、小型化和低功耗的导引型原子芯片陀螺仪.
猜你喜欢
当代陕西(2022年6期)2022-04-19
娃娃乐园·综合智能(2021年12期)2022-01-18
少儿科学周刊·儿童版(2021年22期)2021-12-11
少儿科学周刊·儿童版(2021年22期)2021-12-11
少儿科学周刊·儿童版(2021年22期)2021-12-11
中学生数理化(高中版.高二数学)(2021年3期)2021-06-09
中学生数理化·高二版(2016年12期)2017-02-28
中学生数理化·八年级物理人教版(2016年4期)2016-08-24
中学数学杂志(高中版)(2016年1期)2016-02-23
Coco薇(2016年1期)2016-01-11
