采用TRIZ理论的豌豆割晒机械装备设计与试验
2020-06-04 01:32李金凤赵继云侯秀宁刘思瑶张学敏
农业工程学报 2020年8期
李金凤,赵继云,侯秀宁,刘思瑶,张学敏
采用TRIZ理论的豌豆割晒机械装备设计与试验
李金凤,赵继云,侯秀宁,刘思瑶,张学敏※
(中国农业大学工学院,北京 100083)
针对目前豌豆收获机械化技术在国内研究较少,为实现中国豌豆收获机械化配套作业,减轻劳动力投入,设计了一款豌豆割晒机械装备。首先对豌豆特性进行研究,分析了豌豆收获作业存在的问题。然后基于TRIZ理论中“物-场模型”分析方法进行了切割系统及输送系统的“物-场模型”功能分析,同时采用“冲突解决原理”解决割晒系统中涉及的矛盾冲突,获得合适的解决方案,并依据豌豆植物特性对割晒机主要机构进行了创新设计。完成了豌豆割晒系统中割晒装置、防缠绕拨禾装置、输送铺放装置等关键设计方案求解。最后基于虚拟样机技术建立豌豆割晒机模型结构,并加工出样机,在河南南阳、内蒙古商都、北京平谷3处试验田进行田间试验。田间试验结果1表明,割晒机有较强的适应性,割茬高度小于40 mm,收割效率达到0.13~0.19 hm2/h,北京平谷区试验中收割损失率仅4.96%,漏割率为4.78%。所设计豌豆割晒机作业效果满足农户需求,可为后续豌豆相关收获作业机械装备研究提供参考。
农业机械;试验;设计;割晒机;豌豆;TRIZ理论
0 引 言
豌豆是中国重要的食用豆类和动物蛋白饲料,国内豌豆种植面积和总产量均居世界第二位[1-2]。中国豌豆生产机械化水平极低,尚未有任何成熟可靠的豌豆收获机械,豌豆收获主要依靠人工,生产成本高,极大限制了国内豌豆产业的发展[3-4]。国外豌豆机械研究较早,技术较为成熟,然而国外的豌豆收获机械庞大复杂、成本高、转弯半径大[5],并不适合中国豌豆耕作国情。近年来,国内专家学者针对油菜、水稻作物的割晒机装备进行了深入研究。廖宜涛等[6]针对油菜联合收获机械对油菜成熟度要求高、收获损失率大、作业能耗高等问题,设计了4SY-1.8型手扶式油菜割晒机,可实现南方小田块油菜分段收获作业;金诚谦等[7]对拨指输送链式输送装置进行了结构设计,研制了一种油菜割晒机拨指输送链式输送装置,可以高效流畅完成输送铺放作业,试验验证作业总损失率小于0.85%;楚智伟等[8]对分段收获的水稻割晒机铺放效果及损失率进行研究,针对倒伏水稻的顺割及逆割进行了正交试验分析,得到各因素参数值均符合割晒铺放效果;石增祥[9]设计出一种油菜割晒机可挂接于现有联合收获机底盘,具有较好的切割、分禾、铺放性能。
上述割晒机研究对直立生长作物有较好的收获效果,但对蔓状爬伏生长的豌豆作物收获效果并不理想。本文采用TRIZ(Theory of the Solution of Inventive Problems)理论对豌豆割晒机械各结构功能进行研究分析,寻找适合的“物-场模型”,为豌豆收割机械的研究提供新思路;同时借助“冲突解决原理”,化解系统研制过程中遇到的一个参数改善引起另一个参数恶化的技术矛盾[10-13],实现豌豆割晒机械的创新设计,填补国内豌豆作物机械化收获的空白。
1 豌豆植物特性及TRIZ理论创新设计流程
1.1 豌豆植物特性
对种植较广泛的中豌8号进行物理特性研究,按照豌豆种植农艺标准机播豌豆。当豌豆的生长状态为自然黄叶比例不低于80%,且植株上部荚果变黄(60%~70%),豌豆成熟度处于80%~90%范围内时,表明豌豆处于最佳收获期。选取这一时期内的豌豆作为样本进行物理特性测量,其基本物理特性如表1所示。
豌豆属于攀援性草本植物,在大田种植时,往往不进行搭架引蔓处理,任由豌豆植株自由爬伏生长。豌豆茎为草质茎,木质部不发达,茎秆柔软,易被割台推倒,导致豌豆植株被压在割台下端,普通割晒机械收获豌豆作物状态如图1所示。蔓状爬伏生长特性使得一般割晒机械难以进行有效收割,同时也会因为收割过程中割台喂入量不稳定使机具产生堵塞,而且在豌豆植株输送过程中,植株相互缠绕,极易形成输送堵塞,使得机器可靠性大大降低,连续性收获难度增大。
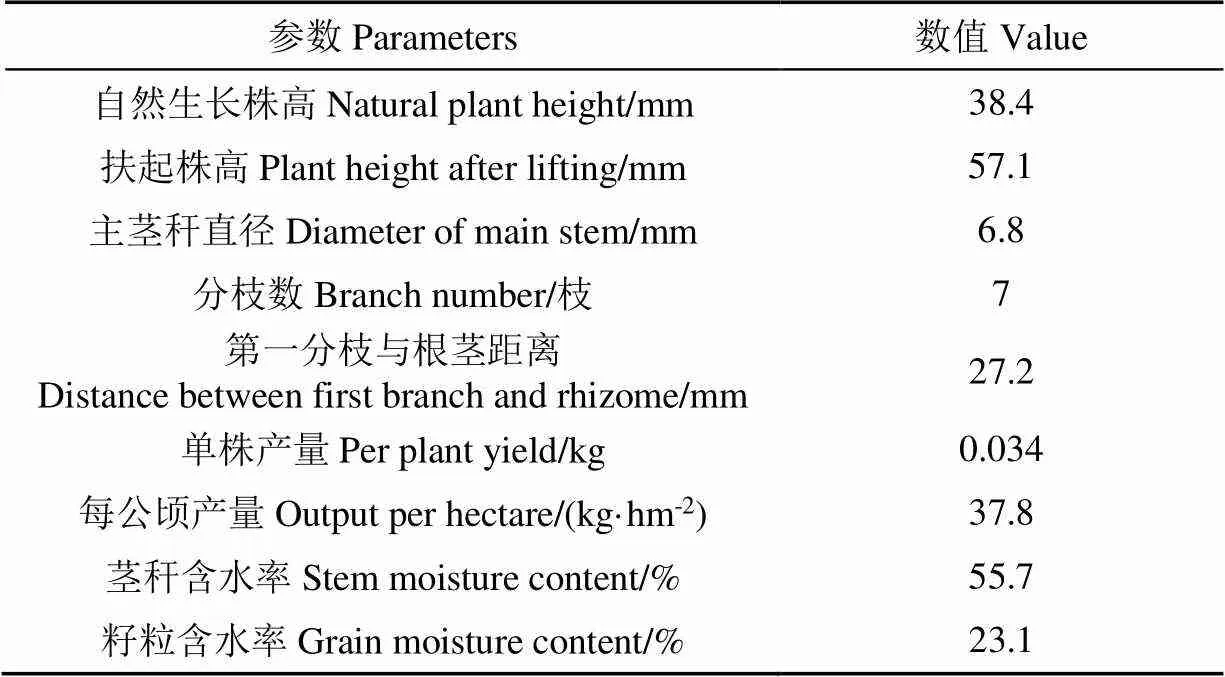
表1 豌豆基本特性
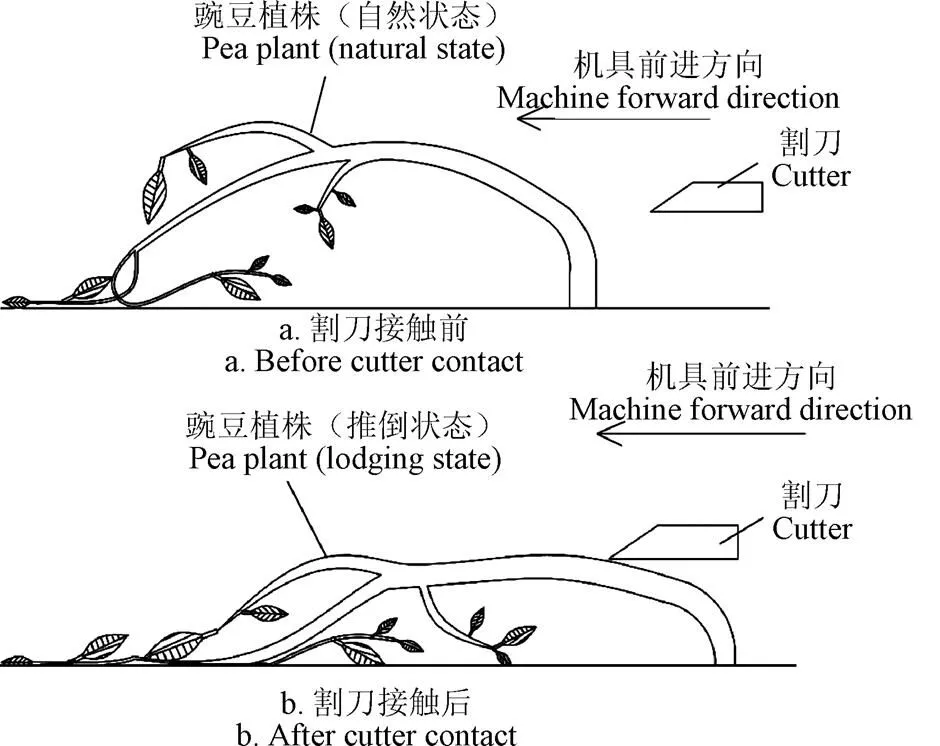
图1 普通割晒机切割情况示意图
1.2 TRIZ理论创新设计流程
由于豌豆作物特殊的植物特性,普通割晒机难以满足该类作物的割晒作业。为实现豌豆收割机械的创新设计,采用TRIZ理论进行研究分析。首先要将问题转化为问题模型,然后利用TRIZ中解决问题的工具找到解决方案模型,最后将解决方案模型转化为具体的解决方案[14-15]。本文采用经典TRIZ解决问题的一般流程如图2所示。
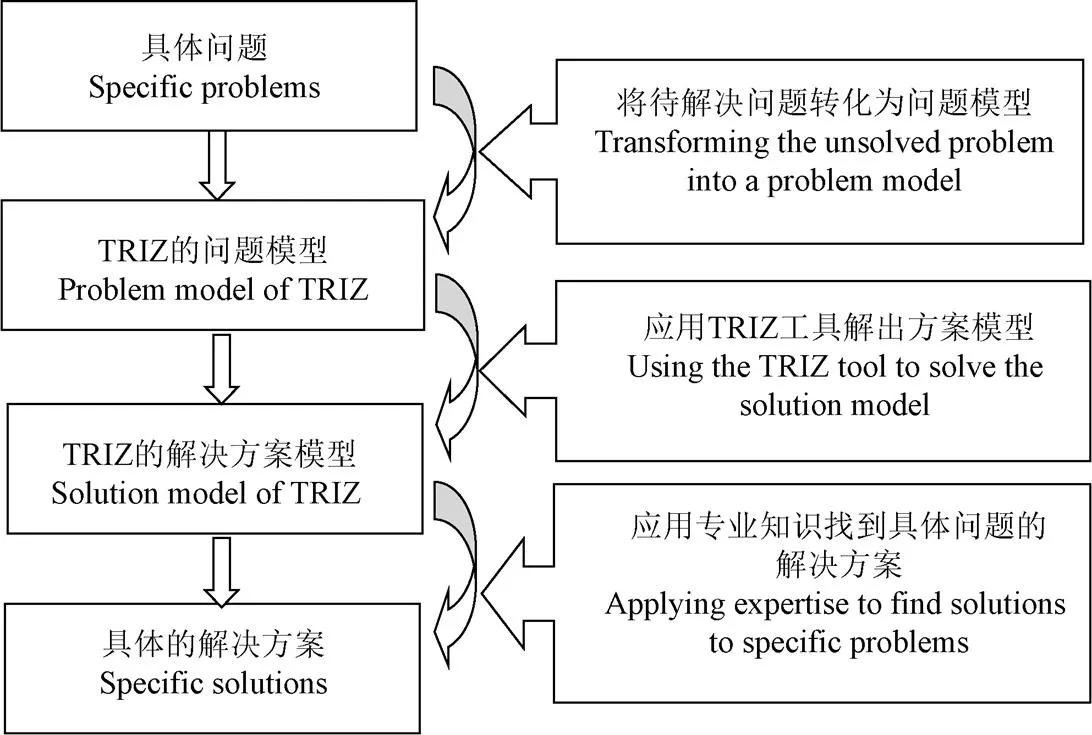
图2 经典TRIZ理论解决问题流程
2 基于“物-场模型”方法的割晒系统功能研究
“物-场模型”分析方法是TRIZ理论的一个重要工具,在对产品功能分析的基础上,对有害作用、不足作用及过剩作用进行优化或删减,从而达到功能升级、完善作用的目的[16-17]。要实现割晒机整套割晒系统协调工作,必须保证该系统各主要组成部分的效能完好。整套割晒过程的实现以整机各个装置协调配合为基础,本文将割晒机划分为切割、输送系统2个相互独立的部分,并针对每个系统进行深入研究,以寻求各部件最佳功能,从而实现整个割晒系统的协调运作[18-19]。
2.1 切割系统的功能研究
切割过程在收获过程中担任重要角色,豌豆作物自下而上第一颗豌豆荚结荚高度较低,为保证收割质量,切割高度应尽可能靠近根茎底端。通过拉拽形成的拉应力场,能够保证较高的植株完整性,收获质量较好,但从机械作用形式上分析,拉拽动作的实施难度高于剪切动作,因此可以借助机械场在豌豆根茎底部形成1个剪切应力场,高效快速切断豌豆根部。该剪切力场可以以常见的往复切割式、圆盘刀式、甩刀回转式等剪切方式实现,其中,往复式切割器结构简单、纵向尺寸小、适应性较广,目前在各类收割机上采用较多;圆盘刀式工作幅宽小、运转平稳,但集禾机构较复杂,消耗功率大,在收割机上应用较少;甩刀回转式切割器为无支承切割,所需作物要求切割速度较快或茎杆刚度较大,不适合豌豆作物的收割。因此,往复式切割器的优势更为突出。
要实现豌豆的收割作业,需使豌豆保持直立状态,辅以扶喂动作,单一的剪切力场不具备剪切和扶喂双重功能,需增加“场”功能,通过复合场的作用,使切割系统兼备“剪切”、“扶喂”功能;同时切割系统需保证根茬一致,并减少豌豆损伤,而田间地形高低不平,很难保证豌豆根茬统一,切割系统需强化剪切力场,使剪切力场能够依据地形调整高低状态,保证割刀始终距离地面一定高度。普通的切割系统模型如图3a所示,“物-场模型”元素完整,但仅依靠切割装置S2产生的切割力场F2难以实现豌豆收获作业,属于效应不足的场。而增强后的切割装置S’2能够适应田间高低不平的作业环境,同时插入扶喂装置S3进行拨动扶喂作业,辅以拨动力场F3来强化提高有用效应(图3b)。
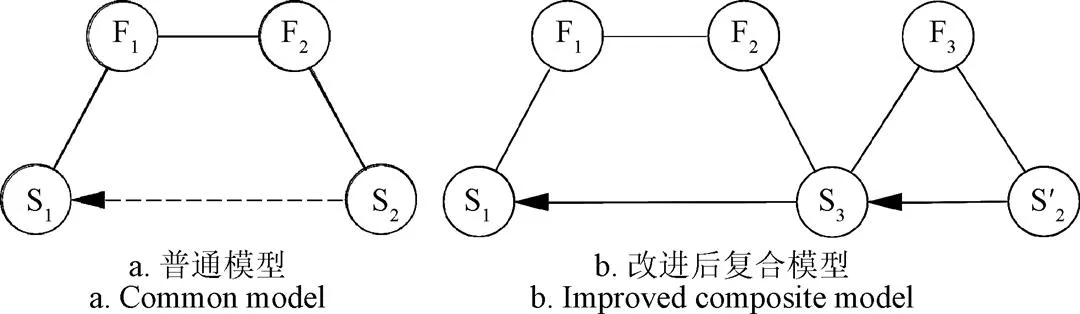
注:F1为重力场;F2为切割力场;F3为拨动力场;S1为豌豆;S2为切割装置;S′2为增强后的切割装置;S3为扶喂装置。下同。
依据切割系统的“物-场模型”,要实现理想切割,整个剪切过程必须保证合适的根茬高度并减少豌豆荚及豌豆作物损伤。本研究拟采用往复式切割器,并辅之浮动切割、扶禾推送的收获方式。通过附加的拨动力场对倒伏和缠绕在一起豌豆作物进行梳理,在收割前使豌豆作物处于挑起状态,并露出根部,保证在切割过程中,割刀仅能接触豌豆根茎。改进后的切割装置如图4所示,豌豆作物在拨动装置的影响下脱离割刀的剪切应力场,所附加拨动装置可以施加拨动力场,拨动装置将蔓生的豌豆挑起,与割刀共同完成切割作业;浮动割台可以保证割茬一致性,提升机具适应性,满足收割要求,固定支架与固定轴连接,固定轴可在限位滑槽里上下移动,故浮动机架可以上下浮动,实现割台浮动作业。
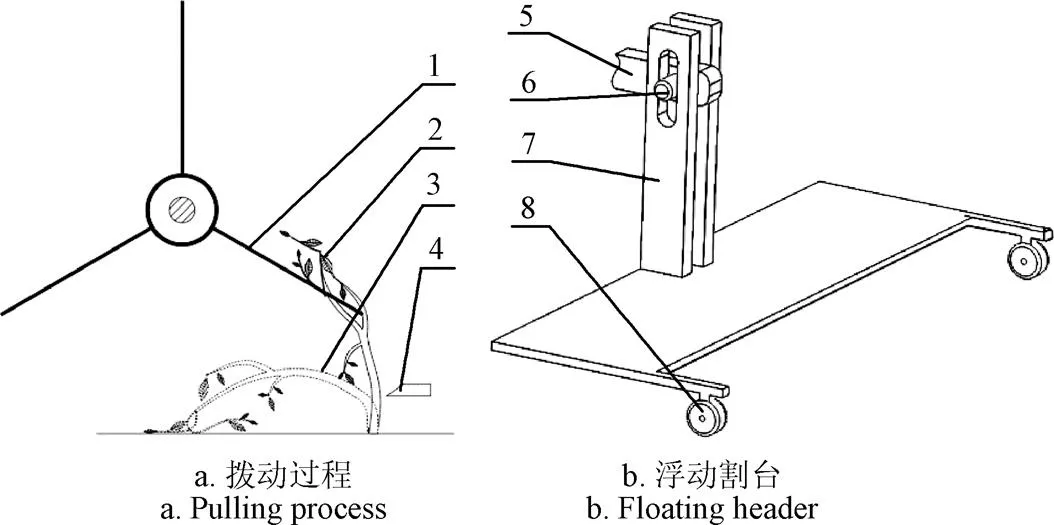
1.拨动装置 2.豌豆挑起状态 3.豌豆攀爬状态 4.割刀 5.固定支架 6.固定轴 7.浮动机架 8.割台滚轮
2.2 输送系统的功能研究
豌豆作物被切割后,落于割台后部,完整的割晒机需具有收集功能,即将切割后的豌豆作物进行收集聚拢至割晒机一侧,以便于后续分段收获[20-21]。收集系统需要有输送结构,通过推动力或者拉拽力形成的输送力场,能够实现较好的聚集输送作用。由于豌豆茎蔓相互缠绕状态,拉拽力场形成及作业方式不利于实现快速、高效输送,而推动力场采用板状结构、齿状结构等不同结构,可以实现豌豆的推动输送作用。板状结构的尺寸偏大,在进行豌豆推动输送过程中,较长的侧边会对输入的豌豆作物造成阻挡,影响持续输送作业,而齿状结构可穿插在豌豆作物中进行拨动输送;输送结构运动方式有旋转运动、直线运动2种方式。考虑到豌豆易缠绕特性,应尽量避免使用旋转运动装置,直线运动方式较为合理。直线运动式齿状输送机构可以布置在割台所在平面、割台上部平行平面和割台后部垂直平面,考虑到前2种布置方式齿状结构会对作物持续输入形成阻碍,形成喂入堵塞,可采取第3种布置方式。
输送机构必须有高效、快速的输送效能,才能满足前端割台较大的喂入量。单一的输送力场难以保证彻底、快速输送,从而造成拥堵。要实现豌豆作物的快速、高效输送作业,避免缠绕,拟设置导流装置,增加导流场,辅助完成输送作业。完善输送系统的复合“物-场模型”,增加“场”功能——通过复合“场”的作用,可实现输送作业高效、彻底。普通的输送系统模型如图5a所示,“物-场模型”系统元素完备,但输送拨齿装置S4产生的输送力场F4效应不足,容易造成输送堵塞,输送拨齿装置S4在系统中属于效应不足的场,增加辅助导流装置S5,“物-场模型”增加导流场F5(图5b),对于完善输送系统的复合“物-场模型”大有益处,能够提升输送效率。
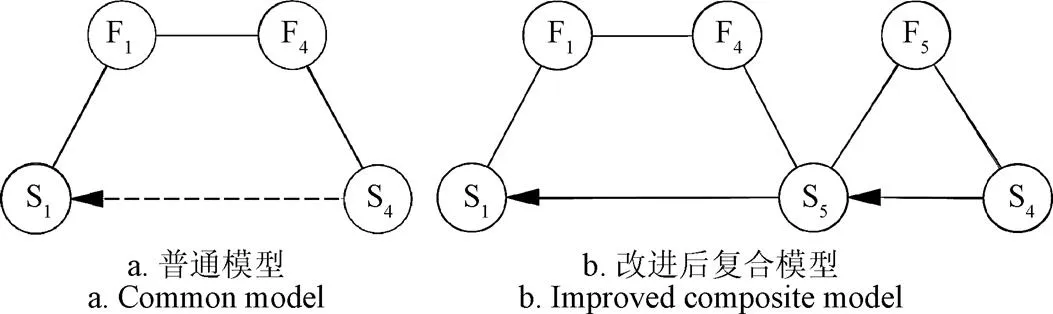
注:F4为输送力场;F5为导流场;S4为输送拨齿装置;S5为辅助导流装置。
依据输送系统“物-场模型”,为实现高效、彻底的输送效能,整个输送结构必须快速协调配合作用,该系统输送原理如图6所示。采用输送拨齿装置,由链条带动作业,拨齿结构能够快速运动,带动豌豆作物推移输送至割晒机一侧;在输送部分下端设置导流板,导流板产生导流场能够辅助输送拨齿将豌豆作物推送至一侧。为更好地实现导流作业,使导流板产生抖动作用,模仿“筛”的动作以使豌豆作物处于抖动状态,抖动导流方式不但可以降低豌豆作物之间的相互缠绕,还可以实现辅助输送,避免豌豆作物的堆叠拥堵。抖动导流板及输送拨齿组成豌豆割晒机的输送系统能够满足豌豆的输送作业。
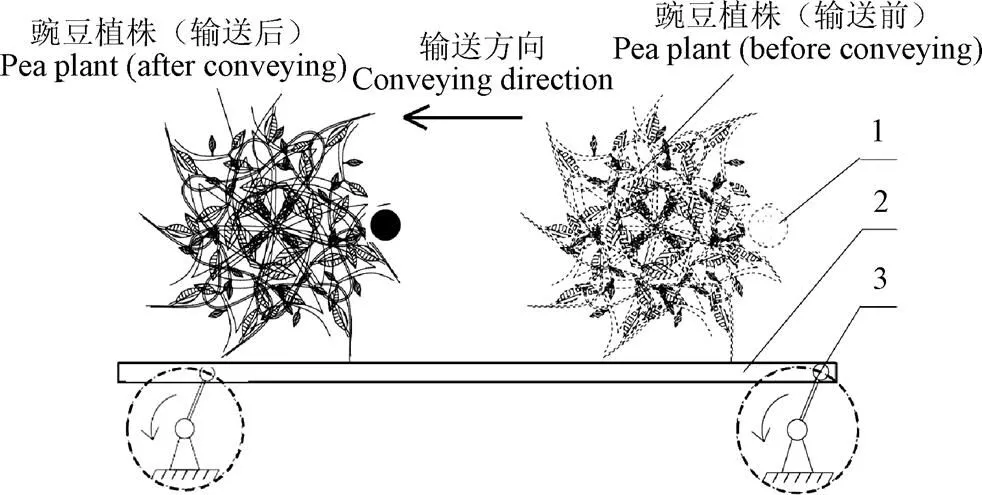
1.输送拨齿 2.抖动导流板 3.曲柄
3 基于“冲突解决原理”的关键部件创新设计
豌豆割晒系统是一个多功能、复合型系统,系统中可能会出现多个功能单元受到同一个物理参数控制和影响的情况,即发生物理参数优化方向的矛盾冲突,同时系统中也可能出现多个因素相互促进、相互制约的情况,即诸技术细节之间的矛盾冲突[22-25]。TRIZ理论的核心是解决矛盾,任何一个系统都是通过克服不断产生的矛盾来发展的,因此本文拟借助“冲突解决原理”化解豌豆割晒系统中可能出现的物理矛盾和技术冲突,辅助完成整套割晒系统的创新设计。
3.1 切割系统关键部件创新设计
3.1.1 切割装置创新设计
结合2.1节分析情况,为提升机具可靠性,将割台设置为浮动结构,采用增加浮动结构方法降低了矛盾冲突,但增加了装置的复杂性,同时给装置的可维修性、可操作性增加了困难。在切割系统切割过程中,切割刀具对根茬产生剪切作用,切割器受外部有害因素作用的敏感性较高,仅通过优化切割器难以协调作业性能和外部有害因素作用敏感性之间的矛盾,可以外加结构消除收割区与待割区豌豆缠绕现象,但提高了装置复杂性。根据上述分析,首先将上述矛盾冲突问题归纳为:27可靠性(收割可靠)、30物体外部有害因素作用的敏感性(收割区与待割区豌豆缠绕)与34可维修性(结构增加)、33可操作性(系统复杂)、36装置复杂性(增加浮动、消缠绕结构)之间的矛盾;然后在阿奇舒勒矛盾矩阵中定位改善和恶化通用工程参数交叉的单元,确定符合条件的发明原理;最后参考发明原理,根据所面临具体问题,找到解决方案。在矛盾矩阵中截取适合于本问题的子矩阵,如表2所示。

表2 切割装置的矛盾冲突矩阵
在阿奇舒勒矛盾矩阵中定位改善和恶化通用工程参数交叉的单元后,首先对表2中的所有发明原理进行分析,了解各个发明原理的具体描述;然后根据所面临具体问题,筛选有价值的发明原理,对于可靠性工程参数有价值的发明原理有1(分割)、11(预先防范),对于物体外部有害因素作用的敏感性工程参数有价值的发明原理有2(抽取)、10(预先作用);最后依据有价值的发明原理提取有价值内容详解,参考内容提示进行发明原理的分析应用,即采取技术手段解决对应难点。表3所示为可靠性工程参数所选2个有价值发明原理的分析应用,表4所示为物体外部有害因素作用的敏感性工程参数所选2个有价值发明原理的分析应用。
参考对上述发明原理分析,根据具体问题,找到解决方案。依据表3,采用往复式切割器进行切割作业,容易组装拆卸、便于替换调整,符合上述发明原理1(分割);在地面高低不平的情况下,为保证统一的割茬高度,通过发明原理11(预先防范)将切割结构设为浮动结构,提升可靠性。依据表4,由发明原理2(抽取)提示,获取往复式切割器切割高效优点,拟在割台左侧(驾驶员视角)设置立式割刀,在工作过程中割断收割区域与待收割区域处缠绕的豌豆;根据发明原理10(预先作用),预先对相互缠绕的豌豆进行切割处理,降低割台受待收割区豌豆有害因素作用的敏感性。
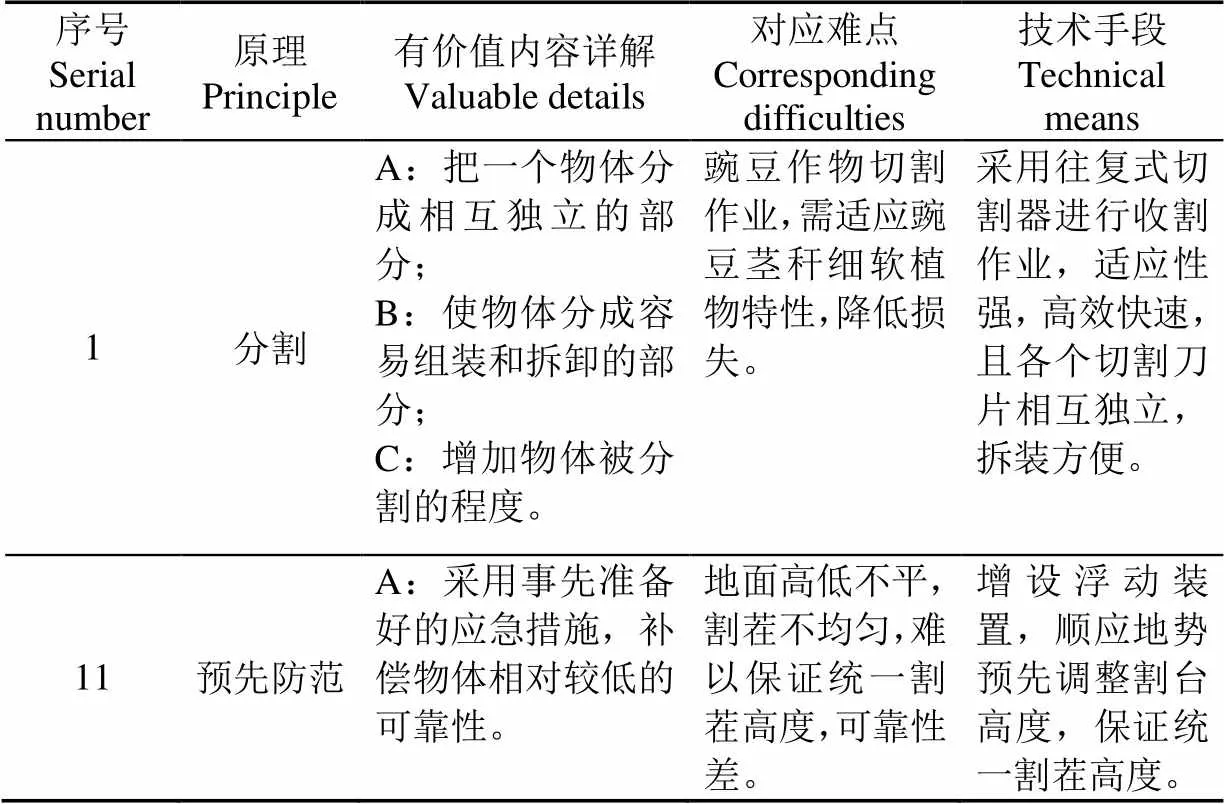
表3 可靠性工程参数有价值的发明原理分析应用
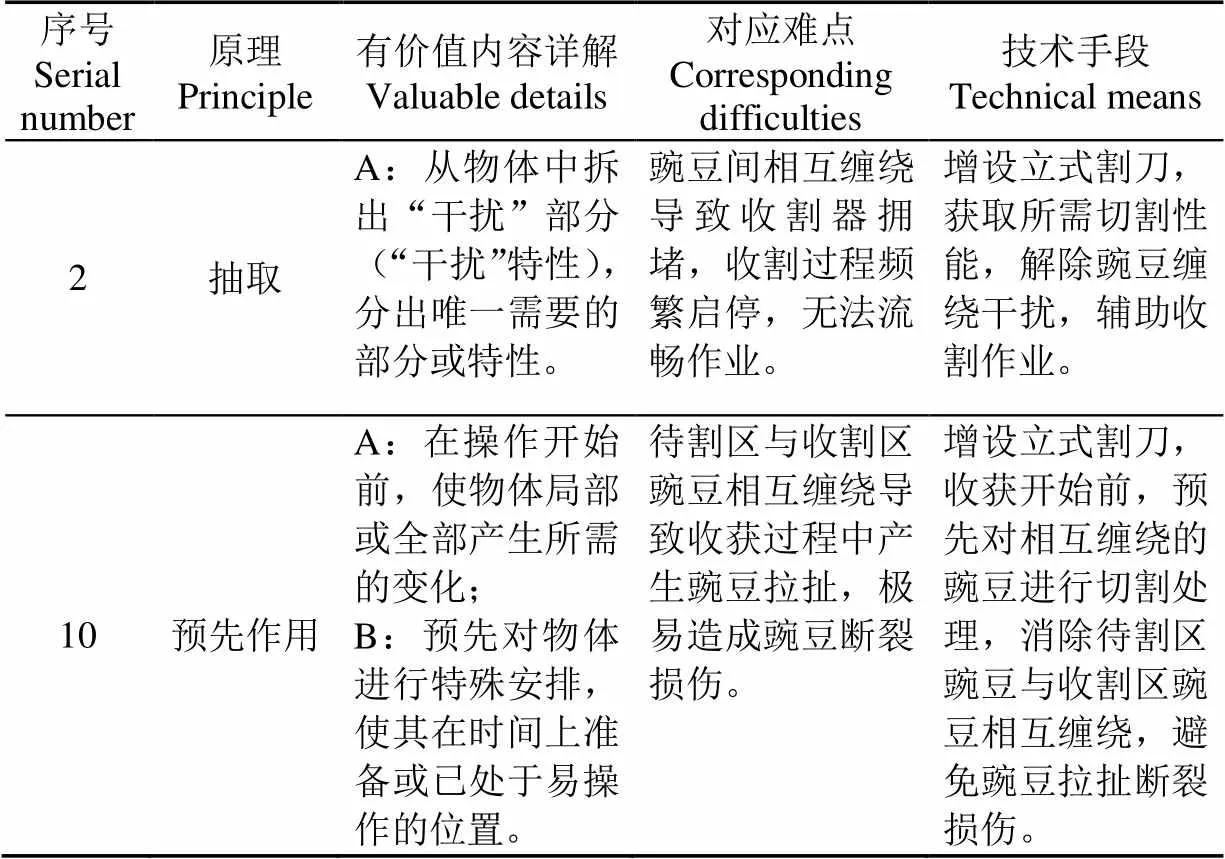
表4 物体外部有害因素作用的敏感性工程参数有价值的发明原理分析应用
通过上述分析,并结合2.1节中的分析,所设计割台结构与实物如图7所示。切割装置创新设计方案如下:选用往复式切割器,横式电机为往复切割器提供动力,适应性强且结构简单;将刚性割台改进为可浮动式割台,在割台前端两侧各设1个浮动轮,整套机具悬挂处设置浮动悬挂架,两侧导轨上安置的2个限位滑块与前端割台部分固定连接,在浮动过程中,限位滑块随着割台起伏而在导轨上滑移,与浮动限位槽连接处形成3点连接,降低机具浮动摇摆现象。浮动限位槽的槽长决定浮动程度,由于豌豆种植地块都会经过耙平整细作业,田间起伏均匀、起伏幅值较小,故设计槽长为6 cm,最大能满足地形起伏幅值为±6 cm的豌豆收获作业。在农作物收获作业中,应保证作物收获质量、统一留茬高度,所以在进行豌豆割晒工作时,要根据地形起伏程度适当提升或降低割台,使之处于适宜的仿形高度(浮动限位槽中限位轴处于槽内中间位置),工作中割台滚轮依据田间高低不平的地面状况上下滚动,保证整个割晒机装备实现浮动作业。
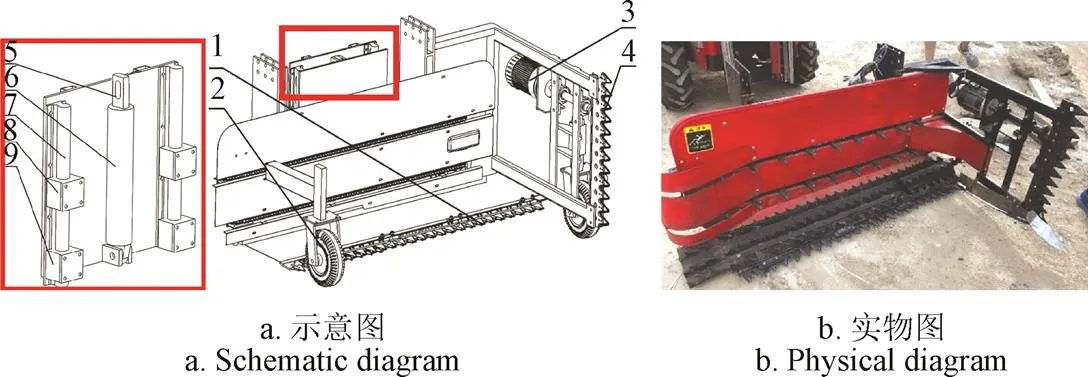
1.往复式切割器 2.割台滚轮 3.电机 4.立式割刀 5.浮动限位槽 6.液压缸 7.导轨 8.限位滑 9.固定块
3.1.2 防缠绕拨禾轮创新设计
结合2.1节分析情况,须在切割装置前端安装拨禾轮,将豌豆梳理挑起以便切割,并能完成推送作物的作用,提升割晒机作业适应性;同时该结构能够将割下的作物推向里侧,以免茎杆堆积在割刀上,体现了结构的多用性特征;为避免缠绕,外加安装防缠绕装置,在1个旋转机构上添加额外的防缠绕装置,会增加机构的复杂性,给拨禾轮维修工作增加困难,同时因机具复杂导致结构稳定性降低。将上述矛盾冲突问题归纳为:35适应性及多用性(扶持茎秆、保证切割、输送作物)与36装置复杂性(添加防缠绕装置)、13结构的稳定性(结构形状)、34可维修性(装置复杂)之间的矛盾,在矛盾冲突矩阵中截取适合于本问题的子矩阵,如表5所示。
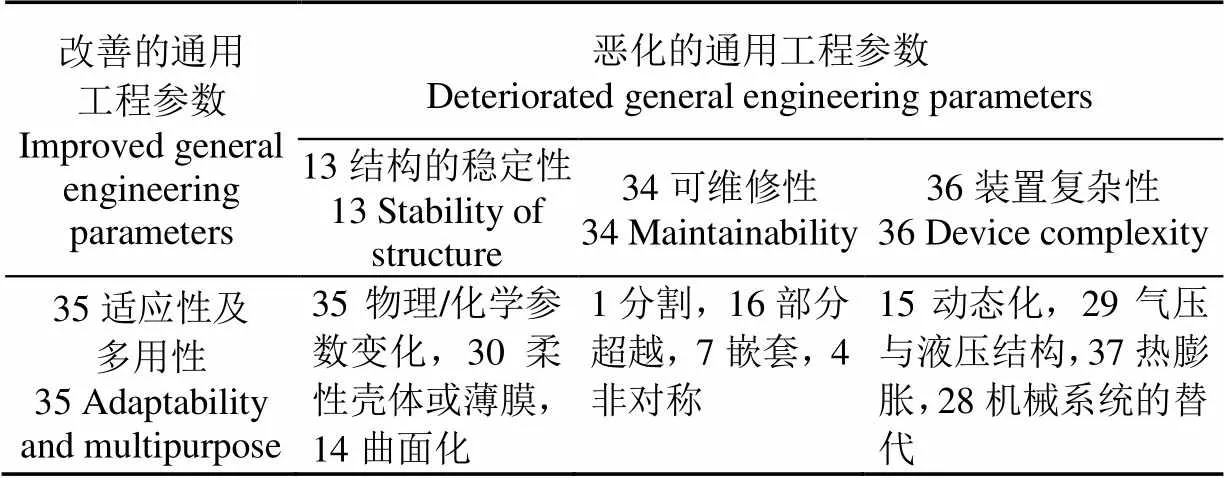
表5 防缠绕拨禾轮的矛盾冲突矩阵
在阿奇舒勒矛盾矩阵中定位改善和恶化通用工程参数交叉的单元,对表5中的发明原理进行分析筛选,对于适应性及多用性工程参数有价值的发明原理有:1(分割)、7(嵌套)、14(曲面化)。表6所示为适应性及多用性工程参数所选的3个有价值发明原理的分析应用。
参考对发明原理的描述,根据具体问题,找到具体解决方案。依据表6具体描述分析,设置拨禾轮机构,且具有防缠绕功能,通过发明原理1(分割),将拨禾轮与防缠绕装置分为两个容易组装拆卸、相互独立的部分,采取搂齿式拨禾轮,该装置适用于收获倒伏作物;通过发明原理7(嵌套)提示,拟采用嵌套的方式将拨禾轮嵌套在防缠绕装置空腔,这需要在防缠绕装置上均匀设有多个出杆间隙,搂齿挑拨作物后顺着出杆间隙收回至空腔;根据发明原理14(曲面化),将防缠绕装置设为滚筒形式,滚筒结构形式内部形成空腔放置拨禾轮。
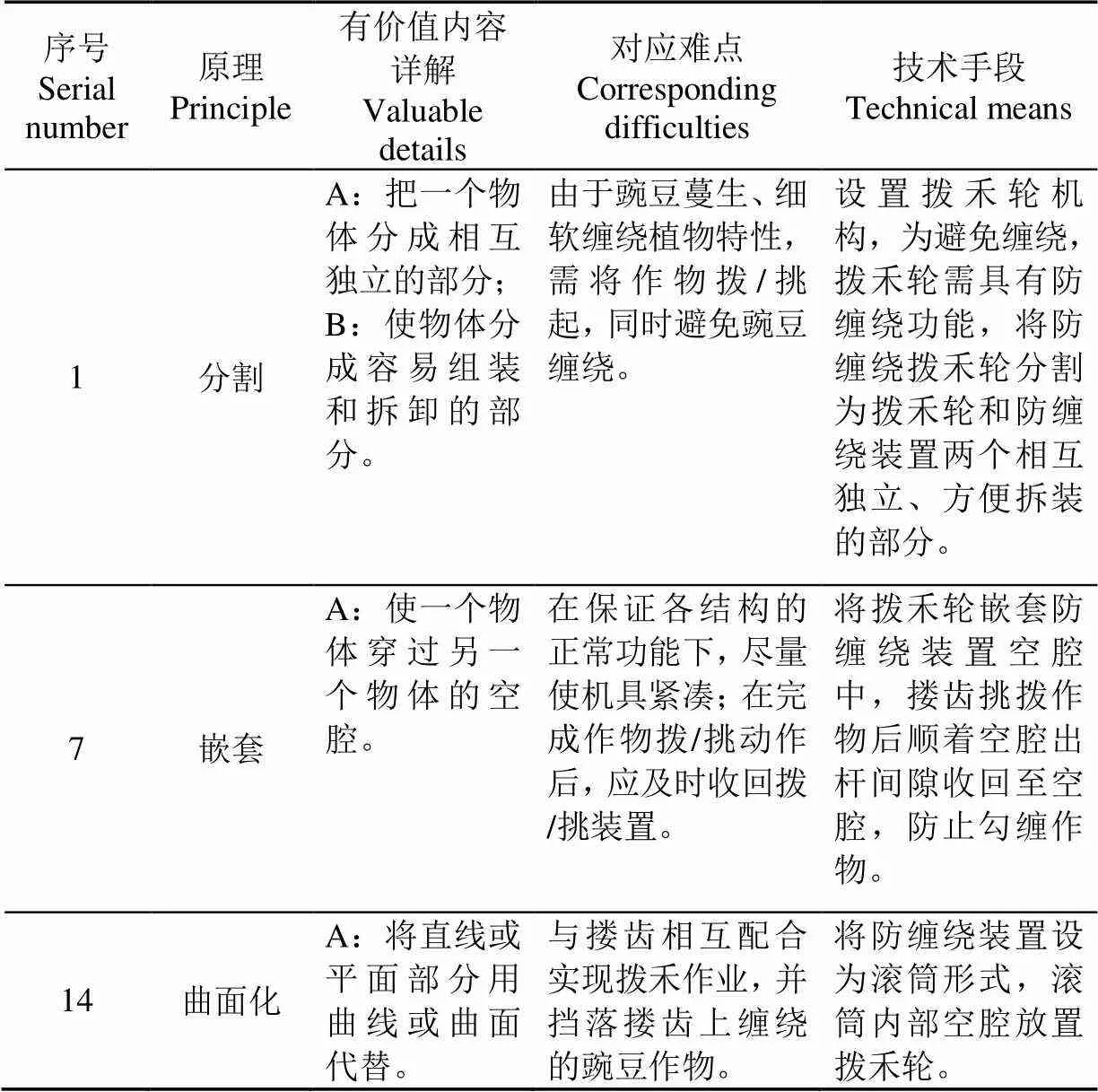
表6 适应性及多用性工程参数有价值的发明原理分析应用
通过上述分析,所设计防缠绕拨禾轮结构与实物如图8所示,防缠绕拨禾轮创新设计方案如下:增设拨禾轮与防缠绕装置以保证切割的顺畅性、有效性,将拨禾轮与防缠绕装置设为可拆卸式结构。拨禾轮由拨禾轮电机带动拨禾旋转轴进行旋转,旋转轴上四周均匀分布搂齿,搂齿将错杂交织在一起的豌豆作物进行挑起梳理,使得横向刀片切割更加的顺畅、充分[26-27];防缠绕转置通过嵌套方式环绕在拨禾轮外侧,并设置出杆间隙为方便搂齿出杆挑起作物,防缠绕装置设置为滚筒形式,搂齿和防缠绕装置相互配合完成挑拨、收回动作,挡落缠绕的豌豆作物。拨禾轮可以辅助切割作业,并把割断的禾秆推向割台,清除切割器上的残留茎秆,提高了作物喂入量、利于切割作业的正常进行。
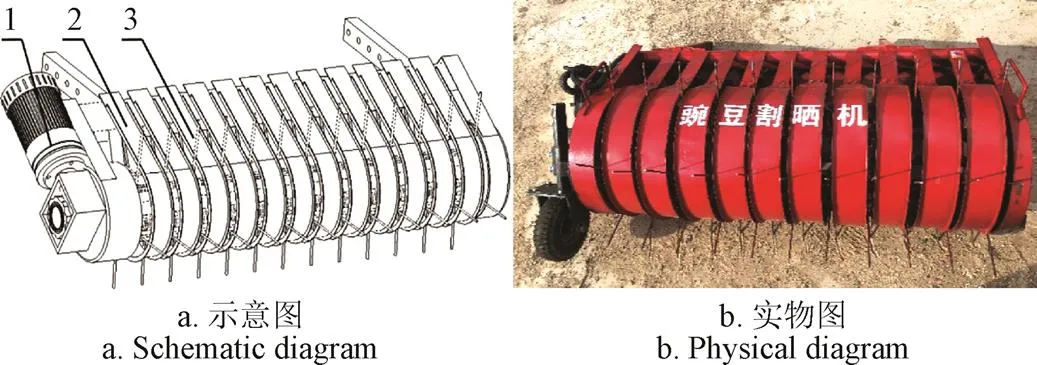
1.拨禾轮电机 2.防缠绕装置 3.搂齿
3.2 输送铺放装置创新设计
结合2.2节分析情况,本输送方案中27可靠性和39生产率是技术矛盾中要改善的参数,可外加装置(抖动导流板)使豌豆作物降低缠绕程度,并具备一定辅助输送功能,而外加装置又会使系统变得复杂;同时为保证高效输送及排净率,输送链条上安置的输送拨齿,应设置不小于2排的输送链条,同时适当增加输送链条上拨齿的数量,该方案给加工带来了一定困难。在该技术矛盾中,36装置的复杂性(外加装置)、26物质或事物的数量(增设链条数量)、32可制造性(复杂装置制造困难)是恶化的参数。在矛盾冲突矩阵中截取适合于本问题的子矩阵,如表7所示。
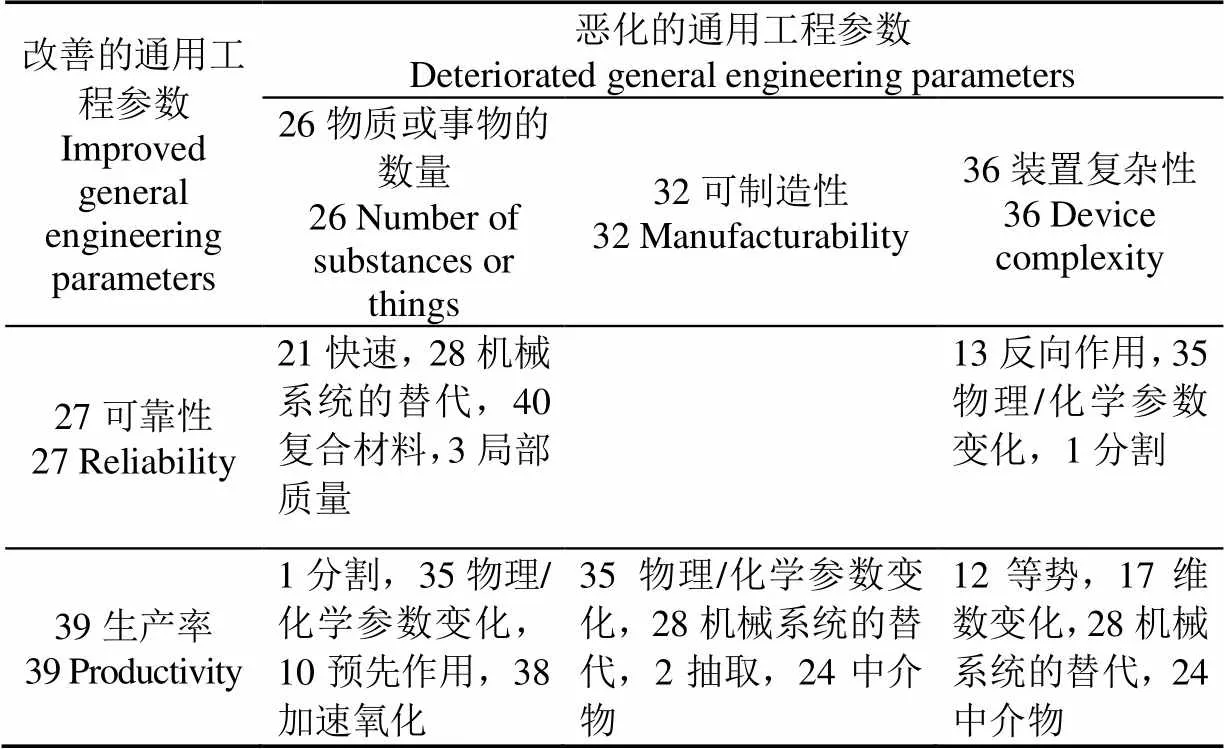
表7 输送铺放装置的矛盾冲突矩阵
在阿奇舒勒矛盾矩阵中定位改善和恶化通用工程参数交叉的单元,对表7中的发明原理进行分析筛选,对于可靠性工程参数有价值的发明原理有:1(分割)、3(局部质量)、35(物理/化学参数变化);对于生产率工程参数有价值的发明原理有:1(分割)、10(预先作用)、24(中介物)、35(物理/化学参数变化)。表8所示为可靠性工程参数所选3个有价值发明原理的分析应用,表9所示为生产率工程参数所选4个有价值发明原理的分析应用。
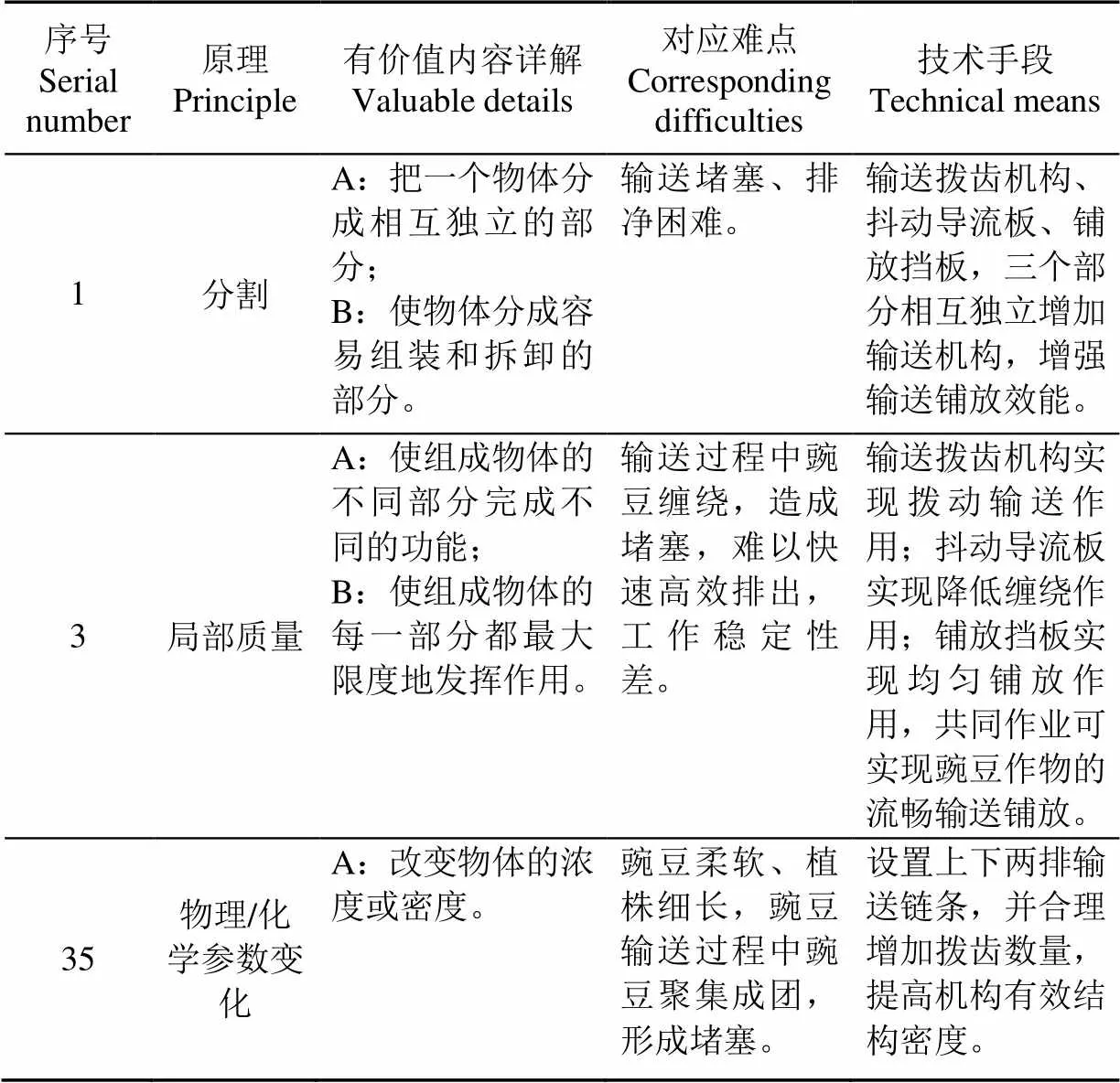
表8 可靠性工程参数有价值的发明原理分析应用
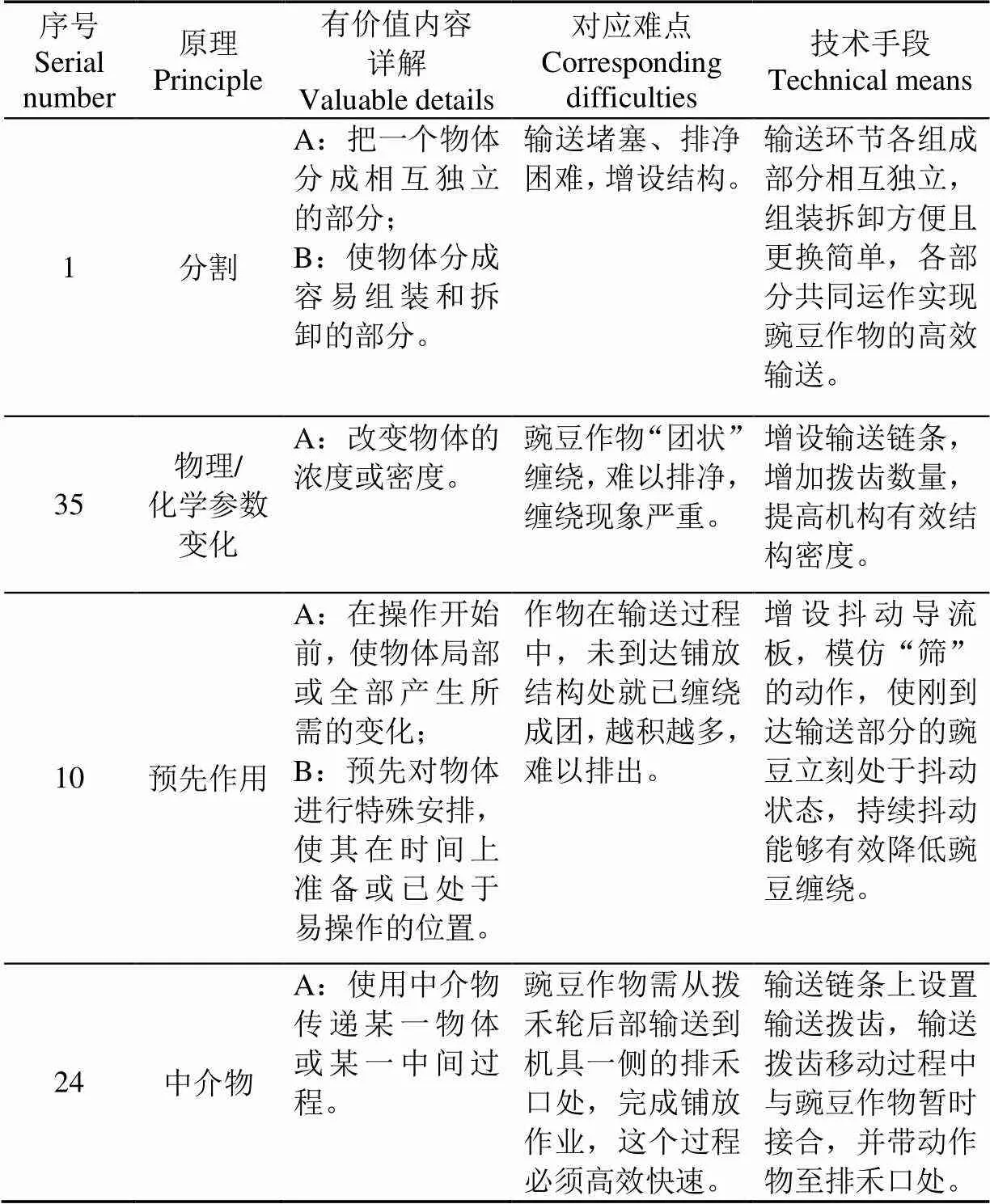
表9 生产率工程参数有价值的发明原理分析应用
依据表8对发明原理的具体描述分析,通过发明原理1(分割)提示,将输送铺放装置分为输送拨齿机构、抖动导流板、铺放挡板3个独立部分;根据发明原理3(局部质量)提示,输送铺放装置的3个部分各自完成不同功能;根据发明原理35(物理/化学参数变化),可设置两排输送链条,分为上下输送部分,使输送链条部分最大限度地发挥输送效能。依据表9具体描述分析,根据发明原理1(分割),输送铺放各部分设为可拆卸式,组装拆卸方便且更换简单;根据发明原理35(物理/化学参数变化),合理增加输送装置中机构有效结构密度;根据发明原理10(预先作用),在输送部分下端设置抖动导流板,为最大限度提升导流作用,抖动导流板上设置3排振动锯齿;根据发明原理24(中介物),利用中介物对豌豆作物进行传递输送,在输送链条上设置输送拨齿,输送拨齿移动过程中与豌豆作物暂时接合,并带动豌豆作物至排禾口处。
通过上述分析,所设计输送铺放机构结构与实物如图9所示,输送铺放装置创新设计方案如下:将输送装置拆分为3个独立部分,分别为输送拨齿输送部分、抖动导流板辅助输送部分和铺放挡板部分;为保证快速输送作业,拟安装上下两条输送链条,输送链条上设置输送拨齿,可带动豌豆作物快速移至排禾口[28];在输送部分下端设置抖动导流板,模仿“筛”的动作以使豌豆作物处于抖动状态,降低缠绕并实现辅助输送;排禾口处设置曲面铺放挡板,在输送链条所在平面延伸形成曲面结构,输送拨齿带动豌豆作物输送至铺放挡板处时,豌豆作物压紧铺放挡板,铺放挡板会剥落输送拨齿上的豌豆作物,剥落后的豌豆作物绕着弯曲的铺放挡板落至地面。
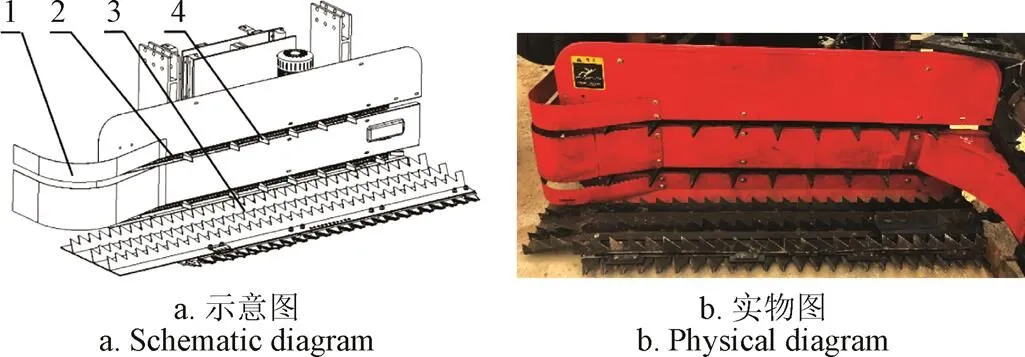
1.铺放挡板 2.输送链条 3.抖动导流板 4.输送拨齿
3.3 豌豆割晒机整机创新设计
本次设计的豌豆割晒机搭载于混合动力农机驱动装备,采用液压系统大幅度调整割台高度,拨禾轮及割刀等装置采用电机驱动,简化机械传动系统,助力农用机械向着节能环保方向发展。结合“物-场模型”确定的系统功能模式与“冲突解决原理”完成的部件创新设计有机整合,形成了豌豆整体割晒系统,基于虚拟样机技术建立的豌豆割晒机模型结构如图10a所示,进行样机试制加工,所得样机尺寸参数为3 300 cm×1 665 cm×1 285 cm,割台质量为140 kg,拨禾轮质量为110 kg,割晒机整机样机如图10b所示。
豌豆割晒机整机系统工作过程可分为以下几步:1)将割刀调整到一个合适的高度,割晒机在动力机具的推动下前进,仿形轮根据地形变化带动割晒系统上下仿形运动;2)立刀解除待割区与收割区的豌豆缠绕,拨禾轮挑起伏地的豌豆辅助割台切割豌豆根部,使割茬高度保持一致;3)豌豆作物被切割后,被拨禾轮推至后部输送机构,输送链条上的输送拨齿拨动豌豆作物快速移动,底部抖动导流板进行“筛”的动作以降低豌豆作物缠绕并实现辅助输送;4)输送拨齿带动豌豆作物输送至排禾口,排禾口处铺放挡板剥落输送拨齿上的作物完成铺放作业。

图10 整机结构设计
4 田间试验
对所设计的豌豆割晒机进行田间试验验证,研究确定豌豆割晒机的最佳工作方案,从而提升收割作业质量,推进豌豆收获机械化进程。分别于2019年8月在北京平谷区(117°02′E,40°20′N)、2019年5月在河南省南阳市镇平县(112°09′E,32°97′N)、2019年9月在内蒙古商都县小刘盆地(113°49′E,41°78′N)3个不同地区的地点进行了豌豆割晒机田间试验。测定割晒机实际作业的割茬高度、收割损失率、漏割率、收割效率性能参数,对豌豆割晒机的适应性、可靠性、生产率、收获质量等进行综合评价分析。田间试验现场及收割效果如图11所示,试验结果如表10所示。
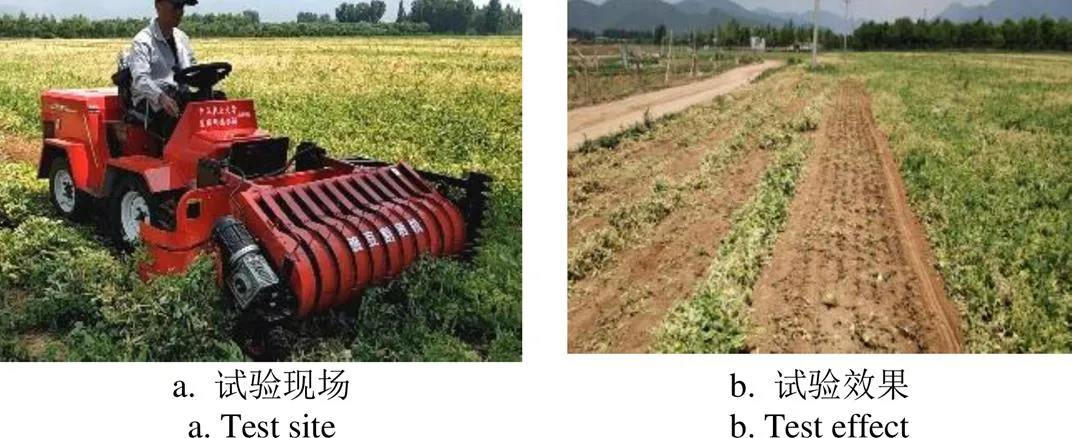
图11 田间试验
河南省南阳市镇平县试验田属于林间套作种植模式,分为2个区域,一部分为桂树豌豆套种,另一部分为核桃树豌豆套种,种植品种为奇珍76,农户按需收获青豌豆,豌豆成熟度为60%;内蒙古商都县当地土质属于沙质土,局部地势高低起伏较为严重,豌豆品种为荣涛5号,由于土质特性,豌豆作物矮小结荚率低,杂草较多,豌豆的成熟度达90%以上;北京平谷区豌豆种植规模超过300 hm2,地势平坦,田间管理合理,种植品种为中豌8号,豌豆成熟度为85%。总体来说豌豆割晒机的割茬高度小于40 mm,收割效率可达0.13~0.19 hm2/h。试验结果表明,豌豆割晒机作业效果性能稳定,具有结构精巧、操作简便、高效实用的特点。
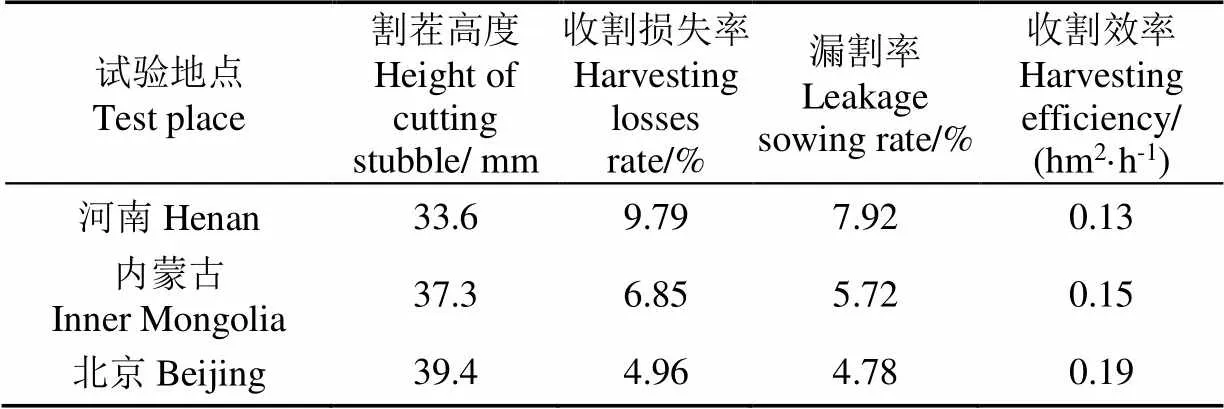
表10 试验田样机试验结果
由表10可知,豌豆割晒机在北京平谷区收获效果最佳,收割损失率仅有4.96%,漏割率为4.78%;河南试验田地表不平坦、田间管理不到位,豌豆成熟度较低导致收割损失率达到9.79%;内蒙古试验田田间杂草众多,沙质土壤并有较多石块,豌豆种植不均匀且存在有炸荚现象,收割损失率达到6.85%,漏割率为5.72%。由于割晒机体型小巧,无堵塞现象,豌豆割晒机能够满足大田作业、林间套作收获作业。在田间管理较好、农艺水平较高的地块表现出较好的收获效果。同时试验也反映了要推进农业机械化,必须坚持农机农艺相互适应、相互促进。只有农机农艺高度相互融合,才能促进建设现代农业机械化发展。
5 结 论
1)本文采用TRIZ理论对豌豆割晒系统进行研究,分析了割晒系统的基本组成、功能模式以及关键技术创新设计,提升了设计方案的可行性,成功设计并研制出国内第一台豌豆割晒机。
2)运用TRIZ理论进行了切割系统、输送系统的“物-场模型”功能分析,并根据豌豆收获的特点提出了能够实现多物理场有效耦合的机械结构形式,为割晒作业过程的流畅、可靠、高效动作提供了保障;基于“冲突解决原理”对切割系统、防缠绕拨禾轮装置、输送铺放装置进行了创新设计,解决了系统在执行过程中可能出现的低效、损失大、可靠性不足等方面的问题,并借助虚拟样机技术完成了豌豆割晒系统的结构设计。
3)在3个地区进行了田间试验验证,试验表明所设计的豌豆割晒机有较强的适应性,可以满足豌豆不同生长阶段、不同生长模式下的收获作业,条铺整齐,割茬统一,输送堵塞现象少,在田间管理较好地段收割损失率仅为4.96%,漏割率为4.78%。试验证明只有农机农艺高度结合才能实现较高农机化水平。本文研究为后续的豌豆收获机械理论研究及试验优化设计提供了良好基础。
[1] 崔再兴,李玲. 豌豆的特征特性及开发利用价值[J]. 杂粮作物,2010,30(2):154-155.
[2] 沈红芬. 菜用豌豆“温豌1号”的选育及推广[D]. 杭州:浙江大学,2010.
Shen Hongfen. Breeding and Application of Newsweet Bea Variety “wenwan1”[D]. Hangzhou: Zhejiang University, 2010. (in Chinese with English abstract)
[3] 李达炎,叶惠仪,谢玉威,等. 华南地区冬种荷兰豆的高产优质栽培技术[J]. 现代农业,2018(5):10-12.
[4] 李武. 荷兰豆采收、保鲜技术规程[J]. 蔬菜,2000(7):21.
[5] 赵继云,王晓燕,王杰,等. 豌豆机械化收获技术研究现状与研究趋势[J]. 农机化研究,2020,42(5):1-6.
Zhao Jiyun, Wang Xiaoyan, Wang Jie, et al. Research status and prospect of pea mechanized harvesting technology[J]. Journal of Agricultural Mechanization Research, 2020, 42(5): 1-6. (in Chinese with English abstract)
[6] 廖宜涛,陈传节,舒彩霞,等. 4SY-1.8型手扶式油菜割晒机设计与试验[J]. 农业机械学报,2014,45(S1):94-100.
Liao Yitao, Chen Chuanjie, Shu Caixia, et al. Design and experiment of 4SY-1.8 rape walking windrower[J]. Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(S1): 94-100. (in Chinese with English abstract)
[7] 金诚谦,尹文庆,吴崇友. 油菜割晒机拨指输送链式输送装置研制与试验[J]. 农业工程学报,2013,29(21):11-18.
Jin Chengqian,Yin Wenqing,Wu Chongyou.Development and experiment of rape windrower transportation device with poke finger conveyor chain[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2013, 29(21): 11-18. (in Chinese with English abstract)
[8] 楚智伟. 水稻割晒机割台设计与试验研究[D]. 大庆:黑龙江八一农垦大学,2016.
Chu Zhiwei. The Design and Experimental Research of the Rice Windrower[D]. Daqing:Heilongjiang Bayi Agricultural University, 2016. (in Chinese with English abstract)
[9] 石增祥. 4SY-2.2型油菜割晒机的设计与试验研究[D]. 长沙:湖南农业大学,2017.
Shi Zhengxiang. Design and Experiment of 4SY-2.2 Rapeseed Windrower[D]. Changsha: Hunan Agricultural University, 2017. (in Chinese with English abstract)
[10] 檀润华,王庆禹,苑彩云,等. 发明问题解决理论:TRIZ-TRIZ过程、工具及发展趋势[J]. 机械设计,2001(7):7-12,53.
Tan Runhua, Wang Qingyu, Yuan Caiyun, et al. Theory for solving the inventive problems (TRIZ)-the process, tools and developing trends of TRIZ[J]. Journal of Machine Design, 2001(7): 7-12, 53. (in Chinese with English abstract)
[11] 檀润华,杨伯军,张建辉. 基于TRIZ的产品创新模糊前端设想产生模式研究[J]. 中国机械工程,2008,19(16):1990-1995.
Tan Runhua,Yang Bojun,Zhang Jianhui.Study on patterns of idea generation for fuzzy front end using TRIZ[J].China Mechanical Engineering, 2008,19(16): 1990-1995. (in Chinese with English abstract)
[12] 张简一,郭艳玲,杨树财,等. 基于TRIZ理论的产品创新设计[J]. 机械设计,2009,26(2):35-38.
Zhang Jianyi, Guo Yanling, Yang Shucai, et al. Innovation design of products based on TRIZ theory[J].Journal of Machine Design, 2009, 26(2): 35-38. (in Chinese with English abstract)
[13] 卢希美,张付英,张青青. 基于TRIZ理论和功能分析的产品创新设计[J]. 机械设计与制造,2010(12):255-257.
Lu Ximei, Zhang Fuying, Zhang Qingqing. Product innovation design based on the theory of TRIZ and functional analysis[J]. Machinery Design & Manufacture, 2010(12): 255-257. (in Chinese with English abstract)
[14] 权龙哲,曾百功,马云海,等. 基于TRIZ理论的玉米根茬收获系统设计[J]. 农业工程学报,2012,28(23):26-32.
Quan Longzhe,Zeng Baigong,Ma Yunhai,et al.Design of corn stubble harvester based on TRIZ theory[J].Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2012, 28(23): 26-32. (in Chinese with English abstract)
[15] 高常青,黄克正,王国锋,等. 由TRIZ理论的通用解求问题的特殊解[J]. 中国机械工程,2006,17(1):84-88.
Gao Changqing, Huang Kezheng, Wang Guofeng, et al. From generic solution to specific solution of TRIZ[J]. China Mechanical Engineering, 2006,17(1): 84-88. (in Chinese with English abstract)
[16] 仇成. 创新问题解决理论(TRIZ)在产品设计领域的应用研究[D]. 南京:南京理工大学,2008.
Qiu Cheng. Research on the Theory of Inventive Problem Solving and its Application for the Product Design[D]. Nanjing:Nanjing University of Science and Technology, 2008. (in Chinese with English abstract)
[17] 张卫国,张国全,何海,等. 运用TRIZ理论解决复杂机电产品的创新设计问题[J]. 机械设计与研究,2005,21(3):15-18.
Zhang Weiguo, Zhang Guoquan, He Hai,et al.A study on creative design for nachine product according to TRIZ theory[J]. Machine Design and Research, 2005,21(3): 15-18. (in Chinese with English abstract)
[18] 马赛,李凤鸣,钱旺. 基于TRIZ理论的D型打结器设计与试验[J]. 农业机械学报,2018,49(S1):327-331.
Ma Sai, Li Fengming, Qian Wang. Design of D-type knotter based on TRIZ theory[J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(S1): 327-331. (in Chinese with English abstract)
[19] 金诚谦,吴崇友,金梅,等. 4SY-2型油菜割晒机设计与试验[J]. 农业机械学报,2010,41(10):76-79.
Jin Chengqian, Wu Chongyou, Jin Mei, et al. Design and experiment of 4SY-2 rape windrower[J]. Transactions of the Chinese Society for Agricultural Machinery 2010, 41(10): 76-79. (in Chinese with English abstract)
[20] 吴崇友,肖圣元,金梅. 油菜联合收获与分段收获效果比较[J]. 农业工程学报,2014,30(17):10-16.
Wu Chongyou, Xiao Shengyuan, Jin Mei. Comparation on rape combine harvesting and two-stage harvesting[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2014, 30(17): 10-16. (in Chinese with English abstract)
[21] 石磊,吴崇友,梁苏宁,等. 油菜分段收获齿带式捡拾器的设计与试验[J]. 中国农机化,2011,32(4):75-78,82.
Shi Lei, Wu Chongyou, Liang Suning, et al. Design and experiment on toothed-belt-type pickup device for partition harvesting of oilseed rape[J]. Chinese Agricultural Mechanization, 2011,32(4): 75-78, 82. (in Chinese with English abstract)
[22] 马义东,徐灿,崔永杰,等. 水培生菜整株低损收获装置设计与试验[J]. 农业机械学报,2019,50(1):162-169.
Ma Yidong, Xu Can, Cui Yongjie, et al. Design and test of harvester for whole hydroponic lettuce with low damage[J]. Transactions of the Chinese Society for Agricultural Machinery, 2019, 50(1): 162-169. (in Chinese with English abstract)
[23] 张付英,张林静,王平. 基于TRIZ进化理论的产品创新设计[J]. 农业机械学报,2008,39(2):116-119,166.
Zhang Fuying, Zhang Linjing, Wang Ping. Study on product innovative design based on TRIZ evolution theory[J]. Transactions of the Chinese Society for Agricultural Machinery, 2008,39(2): 116-119, 166. (in Chinese with English abstract)
[24] 曹卫彬,焦灏博,刘姣娣,等. 基于TRIZ理论的红花丝盲采装置设计与试验[J]. 农业机械学报,2018,49(8):76-82.
Cao Weibin, Jiao Haobo, Liu Jiaodi, et al. Design of safflower filament picking device based on TRIZ theory[J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(8): 76-82. (in Chinese with English abstract)
[25] 刘志峰,杨明,张雷. 基于TRIZ的可拆卸连接结构设计研究[J]. 中国机械工程,2010,21(7):852-859.
Liu Zhifeng, Yang Ming, Zhang Lei. TRIZ based design for disassembly of joint structure[J]. China Mechanical Engineering, 2010, 21(7): 852-859. (in Chinese with English abstract)
[26] 徐立章,李耀明,马朝兴,等. 4LYB1-2.0型油菜联合收获机主要部件的设计[J]. 农业机械学报,2008,39(8):54-57,88.
Xu Lizhang, Li Yaoming, Ma Chaoxing, et al. Design of main working parts of 4LYB1-2.0 rape combine harvester[J]. Transactions of the Chinese Society for Agricultural Machinery, 2008, 39(8): 54-57. (in Chinese with English abstract)
[27] 罗海峰,汤楚宙,邹冬生,等. 龙须草茎秆往复式切割试验研究[J]. 农业工程学报,2012,28(2):13-17.
Luo Haifeng, Tang Chuzhou, Zou Dongsheng, et al. Experiment on reciprocating cutting of eulaliopsis binata stem[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2012, 28(2): 13-17. (in Chinese with English abstract)
[28] 赵洪光,张道林. 秸秆切割装置夹持与切割关系的分析[J].山东理工大学学报:自然科学版,2005,19(4):81-84.
Zhao Hongguang, Zhang Daolin. The relationships between clamping and cutting on straw cutting system[J]. Journal of Shandong University of Technology: Natural Science Edition, 2005,19(4): 81-84. (in Chinese with English abstract)
Design and experiment of pea windrower equipment with TRIZ theory
Li Jinfeng, Zhao Jiyun, Hou Xiuning, Liu Siyao, Zhang Xuemin※
(100083,)
In view of the fact that the current mechanization technology of pea harvesting in China is basically blank, in order to realize the matching operation of pea harvesting mechanization and reduce labor input, the first equipment of pea windrower in China was designed. The characteristics of the pea plant with the soft and creeping vines make it difficult for general machines to harvest effectively. At the same time, the machines will be blocked due to the instability of feeding during harvesting. Moreover, the plants are intertwined in the process of pea plant delivery, which is easy to form delivery blockage. These problems greatly reduce the reliability of the machine and increase the difficulty of continuous harvesting. The innovative design of pea windrower equipment was studied for filling the gap of mechanized harvesting of pea crops in China. Firstly, the characteristics of pea were studied and the problems in pea harvesting were analyzed. Then, based on the plant characteristics of pea, “substance-field model” function analysis of cutting system and conveying system was carried out based on “substance-field model” analysis method in TRIZ theory. Meanwhile, “conflict solving principle” was used to analyze and solve the contradictory conflict involved in the overall system. The appropriate solution was obtained and the main mechanism of the windrower was innovated according to the plant characteristics of pea. According to the analysis, the key components such as anti-winding reel and dithering guide plate were designed. The device can solve the intertwined and blocked problem in the harvest process and realize the efficient conveying and laying operation of pea harvester. The equipment of pea windrower was equipped with hybrid power agricultural machinery drive equipment, the usage of hydraulic system to greatly adjust the height of the header. The reel and cutter are driven by electric motor, which simplifies the mechanical transmission system and helps the agricultural machinery to develop towards the direction of energy conservation and environmental protection. Finally, based on the virtual prototype technology, the model of pea windrower was established and the prototype was manufactured. and field experiments were carried out in three experiment places of Henan Nanyang, Inner Mongolia Shangdu, Beijing Pinggu. In the process of the field experiment, windrowers showed strong adaptability, the height of cutting stubble was less than 40 mm and the harvesting efficiency reached 0.13-0.19 hm2/h. In the experiment of Beijing Pinggu, the harvest loss rate was 4.96%, the leakage sowing rate was 4.78%. The results indicated that the pea windrower could meet the requirements of harvesting in different growth stages and different growth modes with neat strips and uniform stubble, and less conveying blockage. The experiments showed that the combination of agricultural machinery and agronomy can achieve a higher level of agricultural mechanization. The study can provide reference for the mechanical equipment research of pea harvest, and it is helpful to break through the bottleneck of mechanization in the key link of pea harvest, realize the popularization and application of pea production technology in China, and accelerate the development speed and quality of pea production mechanization.
agricultural machinery; test; innovative design; windrower; peas; TRIZ theory
李金凤,赵继云,侯秀宁,等. 采用TRIZ理论的豌豆割晒机械装备设计与试验[J]. 农业工程学报,2020,36(8):11-20.doi:10.11975/j.issn.1002-6819.2020.08.002 http://www.tcsae.org
Li Jinfeng, Zhao Jiyun, Hou Xiuning, et al. Design and experiment of pea windrower equipment with TRIZ theory[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2020, 36(8): 11-20. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2020.08.002 http://www.tcsae.org
2019-12-13
2020-04-12
科技部创新方法工作专项(2016IM030200)
李金凤,博士生,主要从事车辆工程研究。Email:lijinfengvip163@163.com
张学敏,副教授,主要从事车辆节能环保与新能源技术研究。Email:xuemin zh@cau.edu.cn
10.11975/j.issn.1002-6819.2020.08.002
S225
A
1002-6819(2020)-08-0011-10
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
一重技术(2021年5期)2022-01-18
西南石油大学学报(自然科学版)(2021年3期)2021-07-16
建材发展导向(2020年2期)2020-07-14
电子制作(2019年22期)2020-01-14
建材发展导向(2019年5期)2019-09-09
课外生活(小学1-3年级)(2017年5期)2017-06-10
故事作文·高年级(2016年9期)2016-10-25
中学数学杂志(高中版)(2006年4期)2006-07-19