
黄灯启亮时的驾驶行为及影响因素研究
2020-06-03 01:10:48吴伟坤
交通工程 2020年2期
石 京, 罗 灵, 吴伟坤
(清华大学交通研究所, 北京 100084)
0 引言
城市道路交通拥堵和交通事故集中分布在平面交叉口处,且主要发生在黄灯期间[1]. 过往的数据和研究表明,道路交通事故是由人、车、路和环境因素引起的,而驾驶员的不当驾驶行为是其最主要原因[2-4]. 平面交叉口处存在着多种冲突,道路环境更为复杂,车辆在黄灯启亮时接近交叉口,由于驾驶员需要在极短的时间内接收和处理大量的交通信息,容易决策失误,出现抢行、闯红灯等不当驾驶行为. 而当人的行为风险因素与其他风险因素叠加,事故风险将显著增大[4]. 对交叉口处黄灯启亮时的驾驶行为决策进行研究,可为交叉口规模和信号控制等的设计、交通法规制定提供参考依据,有利于降低风险,改善交叉口的交通安全和通行效率.
目前,国内外对交叉口处驾驶行为的研究已取得了不少成果. Rakha. H等[5]根据车辆到停车线的时间距离建立了黄灯期间的停车概率模型. Tim J. Gates等[6]利用黄灯剩余时长建立了黄灯期间驾驶行为决策模型. 龙科军等[7]利用黄灯启亮时车辆位置、速度因素进行了Logistic回归,构建了驾驶员行为模型. 在此基础上,研究者们扩大了影响因素的研究范围,Elmitiny N[8]基于分类决策树分析了黄灯启亮时车辆速度、车辆到停车线的距离、车辆车型等因素对黄灯期间驾驶行为决策的影响. Panagiotis. P[9]考虑了驾驶员性别、年龄等因素对黄灯期间驾驶行为决策的影响,将驾驶员分为激进型、普通型、保守型3类,并建立了停车概率模型. 在数据采集方法上,龙科军等[7]和 David S. Hurwitz等[10]的研究都采用了视频拍摄来获取车辆行驶数据. 总体上,已有研究主要分析了黄灯时长、车辆位置和速度,对驾驶员的行为决策的影响,但对道路环境因素(如有无前车、后车)的考虑不足,且还需要进一步把握行为决策和数学模型的关联.
本文选取黄灯启亮时接近交叉口停车线而需要做出行驶决策的车辆为研究对象,分析驾驶员的决策过程,建立黄灯启亮时的驾驶行为决策模型;通过视频观测,采集分析黄灯启亮时的车辆行驶数据;最后,对模型进行了标定验证,分析影响黄灯启亮时驾驶员决策的关键因素. 本研究的主要贡献包括:①将交通环境因素加入模型的因变量,量化分析了前车、后车的有无对黄灯启亮时驾驶员决策的影响;②将加速度决策纳入了黄灯启亮时的驾驶行为决策内容,可更好地描述驾驶员在黄灯启亮时的驾驶行为.
1 黄灯启亮时的驾驶行为决策过程
假设车辆在限定车速内驶向交叉口,此时交通信号灯由绿灯变为黄灯(黄灯启亮),驾驶员需要对交通信号变化做出即时的驾驶行为决策. 本文将该决策过程分为3个阶段:
1)状态判明阶段. 驾驶员在决策前需判断路况和车辆行驶特征,如交叉口几何尺寸、黄灯时长、车辆速度、距停车线距离等.
2)目标决策阶段. 基于路况和车辆行驶特征,驾驶员需决定通过交叉口或在停车线前停车.
3)加速度决策阶段. 完成目标决策后,驾驶员进一步选择不同数值的加速度.
在状态判明阶段,驾驶员对路况和车辆行驶特征的判断,是做出进一步决策的基础. 孙志强等根据黄灯启亮时车辆到停车线的距离,划分了4种行驶状态[11],本文对这一划分方法进行了改进. 首先定义紧急通过距离和紧急停车距离. 用L1表示紧急通过距离,即黄灯启亮时驾驶员采取加速操作,加速度最大时恰好能通过交叉口的距离;用L2表示紧急停车距离,即黄灯启亮时驾驶员采取减速操作(加速度为负值),加速度最小时恰好能停在停车线前的距离. 用a表示车辆加速度,最大加速度即为最大值amax,最小加速度即为最小值amin. 由于在第2节的视频观测中,摄像机架设于进道口上游,因此本文统一以车尾到停车线距离表示车辆到停车线距离. 则有式(1)(2):
(1)
(2)
式中,v0为黄灯启亮时车辆的速度;vt为交叉口限速值;tp为驾驶员的感知反应时间,即从黄灯启亮到车辆行驶特征发生改变的时间;ty为黄灯信号时长;W为进口道停车线到对侧停车线的距离;Lv为机动车车长.
根据车辆到停车线的距离L0与L1、L2的大小关系,对黄灯启亮时车辆的行驶状态划分如下:
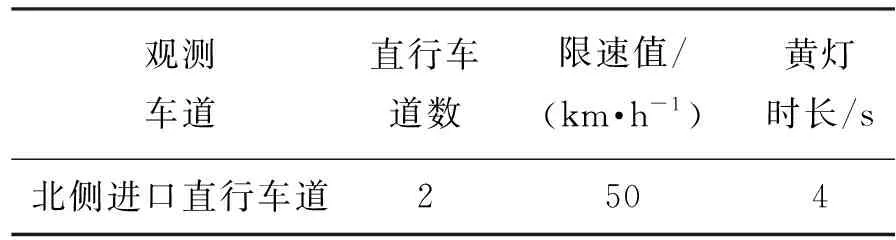
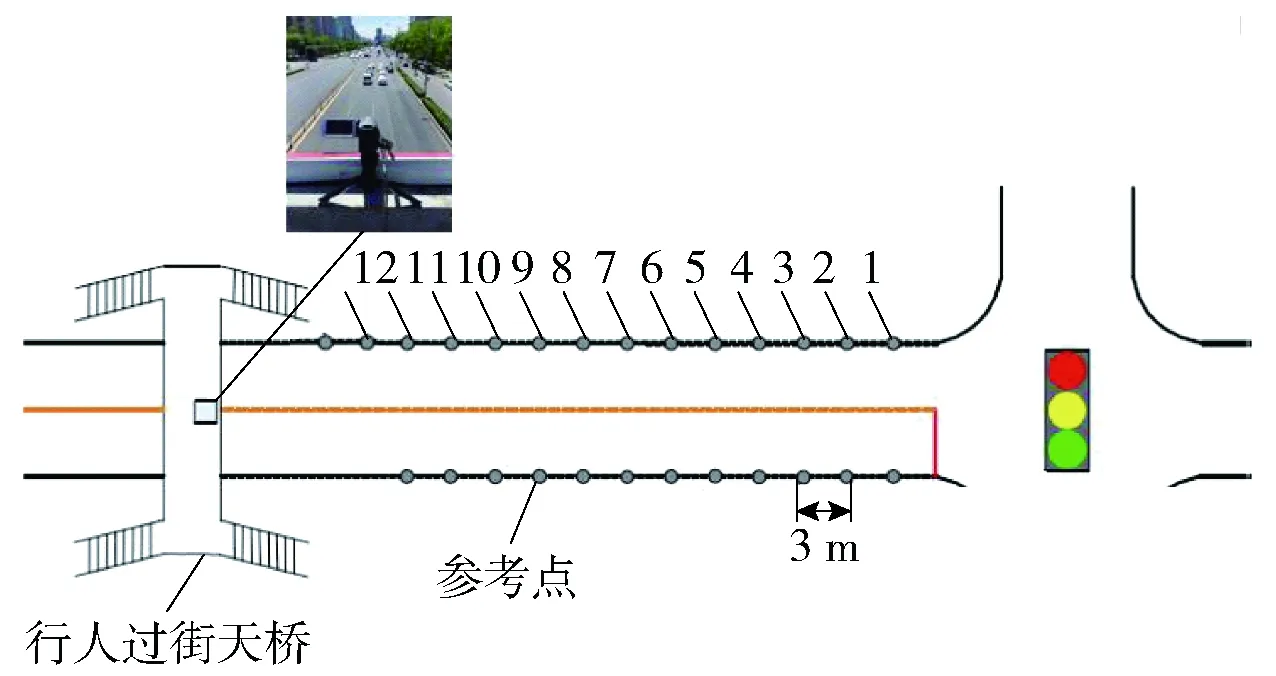
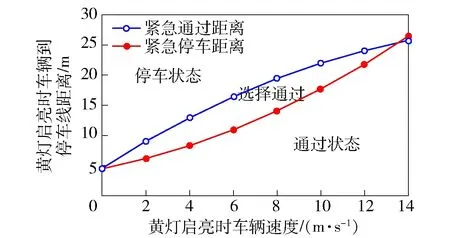
1)通过状态(L0≤L1且L0 2)停车状态(L0≥L2且L0>L1):车辆在黄灯期间可在停车线前停住,但是不能通过交叉口; 3)选择通过状态(L2≤L0≤L1):车辆在黄灯期间可通过交叉口,也可停在停车线前[12]; 4)进退两难状态(L1 通过状态和停车状态下对应的正确决策分别为通过交叉口、减速停车. 选择通过状态下,通过交叉口和减速停车都是正确决策. 进退两难状态是道路设计缺陷导致的,该状态下两种决策都不能达到目标[13]. 基于上述的驾驶行为决策过程,以及各阶段之间的关系,以决策树的形式表示黄灯启亮时的驾驶行为决策过程,如图1所示. 在实际情况中,驾驶员的决策不仅取决于车辆行驶状态,还受到交通环境等的影响,是多因素叠加的结果. 图1 黄灯启亮时驾驶员决策树 为了获取黄灯启亮时的车辆行驶数据,本研究选择北京市海淀区的中关村大街与双榆树北路交叉口进行实地视频观测. 拍摄画面内包括交通信号灯、北侧进口道停车线前50 m的范围和其他相关设施,观测只针对一般小客车,不包括其他类型车辆. 黄灯启亮时车身已越过停车线的车辆和黄灯期间第一个选择停车的车辆(下文称作首停车)之后的车辆不参与决策,故不计入样本. 交叉口的基本特征如表1. 表1 观测交叉口的特征 同时,为了从视频中提取车辆行驶参数,以道路中心分隔栏杆的支撑桩作为距离参考点,桩间距离为3 m,拍摄范围内道路两侧各16个参考点,每侧道路的参考点对应临近车道. 由于从进道口上游向交叉口拍摄,因此在测量车辆到停车线的距离时,采用车尾到停车线的距离. 交叉口及摄像机架设点如图2所示. 图2 交叉口及摄像机架设点示意图 将观测交叉口的特征数据(表1)和其他参数代入式(1)(2),计算不同车速下的L1和L2. 其中,驾驶员感知反应时间tp取1.0 s[14];最大加速度amax取1.6排量机动车的百公里加速度8.5 m/s2;最小加速度amin取干路面上有ABS装置的机动车的最小加速度-8.17 m/s2[15];车长Lv采用一般小客车车长4.5 m. 计算结果如图3,根据车辆到停车线的距离L0与L1、L2的大小关系可看出,在黄灯启亮时,观测交叉口的车辆存在通过状态、停车状态和选择通过状态,不存在进退两难状态. 图3 黄灯启亮时的车辆行驶状态划分值 现场拍摄时段选择在天气晴朗的10:00—11:00和16:00—17:00,累计获得10 h的视频数据,剔除不符合要求的车辆(非小客车或不参与决策的小客车)后,有效样本315辆. 采用人工方法对样本车辆的相关参数进行提取,包括:黄灯启亮时车尾到停车线的距离,目标决策结果(通过/停车),所在车道是否有行人或非机动车,近距离内是否有前后车等. 基于提取出的数据,进一步计算车辆速度、加速度. 基于视频观测记录驾驶员的目标决策结果(通过交叉口或减速停车),并根据L0与L1,L2的大小关系得到车辆的行驶状态,将目标决策结果与图1中黄灯启亮时驾驶员决策树进行比较,判断驾驶员的目标决策是否正确. 具体来说,如果在L0 表2列出了对样本车辆目标决策的统计结果. 其中,决策正确的车辆有255辆,占80.95%;决策错误的车辆有60辆,占19.05%. 在决策错误的车辆中,错误选择通过的车辆有58辆,占96.67%,说明驾驶员群体在目标决策中做出激进决策的比例更高. 表2 样本车辆的目标决策结果统计 加速度决策的结果用a0表示,a0为黄灯启亮后第2 s内的平均车速与第1 s内的平均车速的差值. 由于驾驶员存在1.0 s的知觉反应时间[18],本研究认为a0能较准确地反映出驾驶员在黄灯启亮时的第一反应. 在174辆选择通过交叉口的样本车辆中,加速度为负(即减速通过)的有117辆,占67.24%,比例最高. 在选择通过交叉口的样本中,有158辆在红灯启亮后仍滞留在交叉口内. 此外,在视频观测中还发现了在停车线外停车、闯红灯、急刹车等不当驾驶行为. 为了分析黄灯启亮时的驾驶行为与影响因素之间的关系,进一步建立黄灯启亮时的驾驶行为决策模型,模型由目标决策模型和加速度决策模型2部分组成. 黄灯启亮时驾驶员的目标决策包括:通过交叉口和减速停车. 用二分变量Y表示目标决策结果,Y=1表示驾驶员选择通过交叉口,Y=0表示驾驶员选择停车. 根据变量特征,选取二分类Logistic回归模型进行分析,可表示为: (3) 式中PY=1为黄灯启亮时驾驶员选择通过交叉口的概率. 此模型共设置5个自变量,其中,车辆到停车线距离变量L0、速度变量v0为连续变量;其他3个自变量为01变量,反映对应因素是否存在:前车变量F表示样本车辆前方10 m内有无前车;后车变量C表示样本车辆后方10 m内有无后车;行人或非机动车变量表示是否存在妨碍样本车辆正常通行的行人或非机动车. 利用SPSS软件拟合模型,行人或非机动车变量、后车变量在显著性检验中不满足要求,不作为模型的自变量. 因此,二分类Logistic回归模型可表示为: (4) 再次拟合观测数据,可得到: (5) 完成目标决策后,驾驶员需进一步决策加减速操作对应的加速度,以完成通过或停车的决策目标. 用a表示驾驶员加速度决策的结果. 为了简化研究,本文假定黄灯启亮后,驾驶员只做出一次加速度决策,并保持该加速度直到黄灯结束. 采用多元线性回归模型,可表示为: (6) 此模型中共设置6个自变量,其中车辆到停车线距离变量L0、速度变量v0、前车变量F、后车变量C、行人或非机动车变量的定义与3.1节相同,目标决策变量D是指驾驶员目标决策的结果. 利用SPSS软件的多元线性回归功能对模型进行拟合,行人或非机动车变量、前车变量在显著性检验中不满足要求,不作为模型的自变量. 因此,模型可表示为: a=γ+λ1L0+λ2v0+λ3C+λ4D (7) 再次拟合观测数据,可得到式(8): a=0.78+0.12L0-0.62v0-0.49C+1.88D (8) 对拟合优度进行检验,得到Sig.=0.000<0.05,表明在95%置信水平下,模型整体检验是显著的.R2=0.409,表示该模型拟合优度一般. 方程中L0的系数为正,说明车辆到停车线的距离越大,驾驶员加速时的加速度绝对值越大,减速时的加速度绝对值越小.v0的系数为负,表明速度越大,驾驶员加速时的加速度绝对值越小,减速时的加速度绝对值越大. 目标决策变量D的系数为正,表明驾驶员选择通过交叉口时,加速时的加速度绝对值更大,减速时的加速度绝对值更小. 后车变量C的系数为负,说明在无后车的情况下,驾驶员选择加速时的加速度绝对值更大,选择减速时加速度绝对值更小. 1)根据黄灯启亮时的目标决策模型可发现,黄灯启亮时车辆到停车线的距离、车速以及是否有前车对驾驶员目标决策的影响很大. 车辆到停车线的距离越大,驾驶员选择通过交叉口的概率越小. 车速越大,驾驶员选择通过交叉口的概率越大. 相比没有前车的情况,有前车时驾驶员更倾向于选择通过交叉口. 这可能是因为有前车时驾驶员放大了通过交叉口的效益,在目标决策中表现得更为激进. 2)根据黄灯启亮时的速度决策模型可发现,黄灯启亮时车辆到停车线的距离、车速以及是否有后车对驾驶员速度决策的影响很大. 车辆到停车线的距离越大,驾驶员在加速时加速度越大,减速时加速度绝对值越小. 车速越大,驾驶员加速时加速度越小,减速时加速度绝对值越大. 相比有后车的情况,无后车时,即位于排队队尾时,驾驶员加速时加速度更大,减速时加速度绝对值更小. 这可能是因为在车辆无后车时,即位于排队队尾时,驾驶员更倾向于紧跟前车,在加速度决策中表现得更为激进. 3)根据视频观测的结果发现,样本车辆中在黄灯启亮时选择减速通过交叉口的比例最高,且在选择通过交叉口的174辆样本车辆中,有158辆在红灯启亮时仍滞留在交叉口内. 这主要有2方面原因:一方面,黄灯信号时长的设置只考虑驾驶员在停车线前安全停车所需的最短时间,而不考虑车辆能否在黄灯期间通过交叉口,因此在黄灯信号期间越过停车线的大部分车辆没有足够的时间通过交叉口;另一方面,由于目前交管部门不处罚黄灯信号期间进入交叉口的车辆,而红灯启亮时车身已越过停车线的车辆可继续通行,因此驾驶员在红灯启亮前无法通过交叉口的情况下,仍可能选择驶入交叉口. 驾驶员在黄灯启亮时的驾驶行为受到许多因素的影响,且易出现不当驾驶行为,比如在红灯启亮前无法通过交叉口的情况下驶入交叉口. 由于红灯启亮后,滞留在交叉口内的车辆将与另一方向的车流争抢道路通行权,这种驾驶行为实际上是一种抢行行为[16]. 交通管理部门可根据驾驶员在黄灯启亮时的驾驶行为特征,制定有效的管理措施以减少不当驾驶行为,进而减少交叉口黄灯期间的交通事故. 本文研究了接近交叉路口停车线的车辆驾驶员在黄灯启亮时的驾驶行为及其影响因素. 在本文的研究范围内,通过分析黄灯启亮时驾驶员的行为决策过程,对交叉口车辆进行视频观测,建立了黄灯启亮时的驾驶行为决策模型,包括目标决策模型和加速度决策模型,进而得到车速、离停车线距离、交通环境等变量对黄灯启亮时驾驶行为的影响程度. 研究结果表明驾驶员在黄灯启亮时的驾驶行为受到许多因素的影响,且易出现不当驾驶行为,该结果对于改善目前我国的交通安全现状有重要意义. 目前我国交通法律法规对于如何处理黄灯期间的一些不当驾驶行为仍然存在空白,有待更为深入地研究.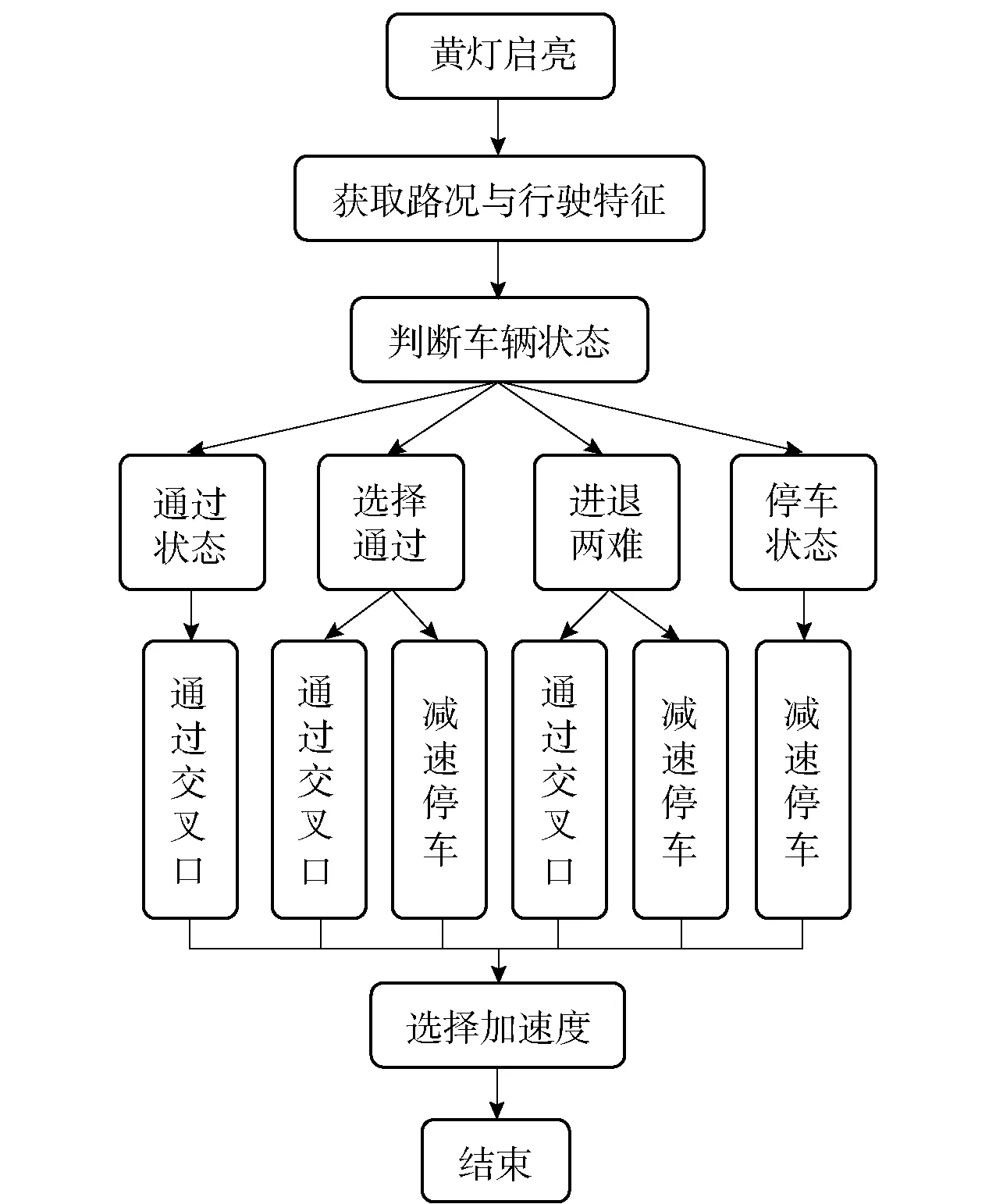
2 数据采集与分析
2.1 基于视频观测的数据采集
2.2 视频数据分析

3 黄灯启亮时的驾驶行为决策模型
3.1 黄灯启亮时的目标决策模型

3.2 黄灯启亮时的加速度决策模型
4 黄灯启亮时的驾驶行为特征分析
5 结论
猜你喜欢
城市轨道交通研究(2022年4期)2022-04-16 02:59:18山东科学(2021年3期)2021-06-10 06:50:56重庆交通大学学报(自然科学版)(2017年3期)2017-05-17 03:37:32城市道桥与防洪(2016年7期)2016-11-18 02:28:44中国房地产业(2016年2期)2016-03-01 01:25:37燕山大学学报(哲学社会科学版)(2015年3期)2016-01-05 17:28:45伴侣(2015年5期)2015-09-10 07:22:44系统工程学报(2015年3期)2015-02-28 19:54:01河南科技(2014年14期)2014-02-27 14:12:02物理教学探讨(2009年12期)2009-06-02 03:12:18
