
工业机器人应用对我国劳动力就业影响的研究
2020-06-02 12:14:26
工业技术经济 2020年6期
(华中科技大学经济学院,武汉 430000)
引 言
在经济发展的过程中,制造业作为国民经济中的重要支柱产业,一直以来都备受各国重视。自从2008年爆发的金融危机对全球经济产生持久而深远的冲击后,各国也开始重新审视不同经济成分的战略定位,意识到了实体经济的重要性,于是美国、德国等发达国家开始在制造业中进行新一轮布局,陆续提出了 “再工业化”战略,引起了新一轮的工业转型竞赛。面对国际制造业竞争加剧,国内经济进入低速增长的新常态,人口红利逐渐消失等各方面的挑战,中国制造业面临转型升级的巨大压力。为此,我国政府制定了制造强国战略的第一个十年行动纲领 《中国制造2025》,提出要通过机器人产业的发展引领我国制造业行业标准的提升,各地方政策也相继出台了机器人产业扶持政策和 “机器换人”计划。然而鉴于中国低技能劳动力占比偏高, “用工荒”与 “就业难”的结构性矛盾突出等特殊国情,机器换人的政策一出,便引发了人们对工业机器人替代劳动力的广泛研究和讨论。工业机器人的应用是否会对我国劳动力产生明显替代?被替代的就业群体是哪些?替代的程度是多少?在制造业转型升级背景下,如何平衡就业与工业机器人之间的关系?这些都是值得研究的问题。
1 文献综述
关于工业机器人应用对就业影响的研究,最早开始于技术进步对就业影响的讨论。其后,伴随着技术进步和经济发展,生产中的自动化水平不断提高,工业机器人在生产中的应用也越来越广泛,其对就业的影响也逐渐引起了学者们的关注。目前关于工业机器人对就业影响的观点主要分为乐观派和悲观派。乐观派认为工业机器人的应用虽然会对就业产生一定冲击,但同时也会创造一些就业机会,对就业的总体效应是补偿效应。如Guido Bugmann[1]认为,机器人能够提高人类劳动者的生产率,通过人机结合的方式,可以充分将人类劳动者和机器人的长处结合在一起,促进劳动力就业。我国学者邓洲[2]也支持工业机器人促进就业的观点,他认为机器人在替代部分劳动力的同时也创造了大量新的岗位,总体上看,工业机器人对就业有促进效应。
悲观派则认为工业机器人对就业总体存在破坏效应。较早的研究有 David R Howell[3]利用投入产出法来预测1985~1990年间工业机器人对美国不同行业和不同职业就业的直接和间接影响,发现机器人对就业既存在破坏效应也存在补偿效应,但就业破坏效应远大于就业补偿效应。在David R Howell的研究基础上,Dietmar Edler和Tatjana Ribakova[4]对其采用的动态投入产出模型进行了改进,并利用德国1980~2000年之间的经济数据就工业机器人对德国的就业总量和就业结构进行了分析和研究,发现工业机器人对就业的补偿效应在应用初期有所体现,随后机器人对就业的替代效应将会超过补偿效应,总体表现为机器人导致就业总量下降。我国学者许军和董冰冰[5]基于机器人的成本函数与劳动力成本函数进行对比分析后发现工业化的过程必然会导致机器人对劳动力进行替代,这是技术进步的必经过程。
也有部分学者就我国工业机器人的发展趋势与劳动力替代的过程进行了分析,认为我国制造业正处于转型升级的关键时期,劳动力成本的上升导致工业机器人替代劳动力成为一个必然趋势,“机器替人”的进程将不可避免地被推进。如辜胜阻等[6]认为,我国企业面临 “招工难”、“用工荒”等问题,使用机器 “替代”人力劳动从而降低对人工的依赖,是我国制造业实现转型升级不可避免的措施。此外,张慧等[7]从我国劳动力市场现状和机器人产业的发展趋势角度进行了相关分析,认为我国制造业正面临劳动力短缺和劳动力成本上升的困境,随着工业机器人成本的不断降低,机器人替代人类劳动者将成为必然趋势。
综合以上研究可以发现,虽然目前关于工业机器人对就业影响的具体效应没有达成统一看法,但是我国作为一个正处于经济转型升级的制造业大国,随着人口红利消失、劳动力成本上升等矛盾的加剧,工业机器人在生产中的大规模使用已经成为一种必然趋势。与此同时,工业机器人凭借其 “成本低”、 “稳定性高”、 “精度高”等优势,必将引起制造业领域的一系列变革,包括产品标准、生产流程、组织管理、劳动力需求、价值链重塑等,对人类的生产过程和劳动力就业也会产生重要影响。因此,研究我国工业机器人未来发展趋势及其对整个就业市场的具体影响,并就如何平衡工业机器人增长与就业之间的矛盾提出科学、合理建议,对保障我国劳动力就业,提高社会福利来说显得尤为重要。
2 模型设立与数据说明
根据新古典经济学家有关技术进步对就业影响的效应分析,主张通过生产函数来解释技术进步的作用机制,同时将其他的生产要素,如资本、劳动等一起放到函数中,通过要素的份额占比来测量其对就业造成的冲击程度。因此本文基于新古典理论的分析框架及内生技术进步理论,将工业机器人视为技术进步的来源之一,对实证提出两个基本假设:
假设1:生产过程中要素投入和产出之间的关系为柯布-道格拉斯生产函数, 即Y=f(A,K,L)=AKαL1-α,资本和劳动力之间存在替代关系,技术进步加快资本积累的过程,对劳动力产生替代。
假设2:工业机器人作为一种内生的技术进步,对中国制造业生产率的提升具有重要的促进作用,并以生产率提高为主要传导机制,对我国制造业就业市场产生影响。
2.1 模型构建
假设我国企业的生产函数为基本的柯布-道格拉斯生产函数,如式(1)所示:

总产出Y是资本投入(K)、劳动投入(L)和全要素生产率(A)的函数,其中资本的份额为α,劳动的份额为β,全要素生产率A代表厂商的技术水平。假设厂商的利润函数为:

其中,π表示厂商的利润,p、w和r分别表示产品的价格、劳动的工资和资本的成本。根据厂商追求利润最大化的思想,对式(2)分别求偏导可得:

对式(1)求L的偏导,同时带入式(3)中可得:

对式(4)两边同时取对数:

因此劳动需求量可以表示成资本存量(K)、实际工资(W)和全要素生产率(A)的函数,即:

根据王光栋等[8]的研究,全要素生产率受自主研发和技术引进(包括外商直接投资和技术购买)的影响,由于工业机器人的引入也会对生产率产生重要影响,因此本文引入工业机器人指标,全要素生产率可以表示成不同技术进步来源的函数,即:

其中B为常数项,rd、fdi、jss和rb分别代表自主研发、外商直接投资、技术市场购买和工业机器人使用量,ε为随机误差项。假定:

结合式(6)~(8),最终构建的面板数据模型为:
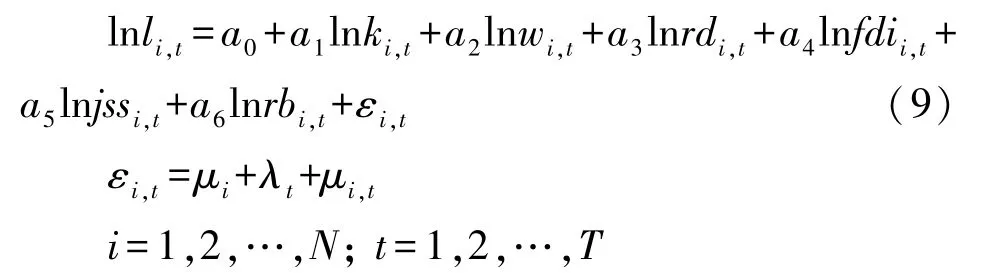
其中,uit为随机误差项,μi和λt分别表示个体效应和时间效应。变量rd表示自主研发,用来衡量自主创新;fdi表示外商直接投资,jss表示技术市场成交额,即技术引进水平;rb表示各省制造业工业机器人保有量。a0表示截距项,ε代表随机误差,i表示第i个省份,t表示第t年。
2.2 数据说明
被解释变量(l)为就业人数,由于本文主要研究的是工业机器人对制造业就业人数的影响效应,因此本文选用各省市历年年底制造业的就业人数来衡量;解释变量(k)为各省历年的资本存量,需要进行测算,本文借鉴单豪杰(2008)[10]提供的资本存量测算方法,对省际资本存量的估算采用永续盘存法,折旧率取10.96%。实际工资(w)利用各省市制造业就业人员的实际平均工资进行测算,并利用CPI平减指数进行平减(2000年价);自主研发(rd)用各省每年制造业的专利申请授权数来衡量;外商直接投资(fdi)采用各省制造业当年实际获得的外商直接投资金额来表示,再利用各年的实际汇率进行换算,最后用GDP平减指数进行平减;技术市场成交额(jss)为各省市技术市场的直接成交额,数据在国家统计局数据库可直接获得,为减小通货膨胀带来的影响,利用GDP平减指数对其进行平减。
本文的核心变量是工业机器人的应用量,由于暂时难以获取各地区精确的工业机器人安装数据,而中国在2005~2017年间的工业机器人70%以上依赖进口,因此本文参照李丫丫等[9]的数据处理方法,用我国各省工业机器人进口数据代表工业机器人使用量。另外,工业机器人的主要应用行业为汽车制造业和电子信息产业,因此本文以各省汽车制造业和计算机、通信及其他电子设备制造业的份额为权数,先获得我国历年来的工业机器人进口额,再利用各省份汽车制造业和通信电子制造业的产值比重权数,将工业机器人的进口分配给各省,得到各省历年的工业机器人进口额,各省市制造业产值比重数据来源于各省统计年鉴。我国制造业进口的机器人主要分为四大类,在HS2002六位数编码体系中分别为:多功能机器人(847950)、激光焊接机器人(851580)、电弧焊接机器人(851531)、电阻焊接机器人(851521),工业机器人进口额数据来源于联合国贸发数据库(UNCTAD)。
本文的样本包括我国30个省市地区(基于数据的可获取性和样本选择的代表性,西藏及港、澳、台地区除外),时间年限是13年(2005~2017年)。为消除残差的异方差带来的影响,将各变量数据进行自然对数转换(用ln表示),各变量的描述性统计结果如表2所示。

表1 变量定义及数据来源说明

续 表

表2 变量的描述性统计
3 实证研究结果及分析
3.1 豪斯曼检验和单位根检验
由于本文实证选取的数据为我国30个省市2005~2017年的数据,时间t(13年)小于样本数量n(30个省市),属于短面板数据回归,因此本文仅采取豪斯曼检验验证模型的准确性,使用单位根检验来检验数据的平稳性。为了确定采取固定效应还是随机效应模型,本文先进行了豪斯曼(Hausman)检验,原假设为随机效应模型,根据豪斯曼检验的结果,在1%的显著性水平上显著拒绝原假设,从而判断本文的模型应采用固定效应模型。
为了回归结果的可靠性,避免模型进行伪回归,本文先对所有变量均进行单位根检验,检验数据的平稳性。为了使检验结果更加可靠,本文采取了3种单位根检验方法并进行比对,由于本文的实证样本属于t小于n的短面板,因此本文采用了LLC检验、IPS检验和HT检验3种方法对本文的面板数据进行了单位根检验。根据检验结果,在水平检验中LLC检验、IPS检验和HT检验都检测出了部分变量存在单位根。为实现数据的平稳,将各变量进行一阶差分,发现所有变量均在一阶差分后平稳,在1%的显著性水平下拒绝了存在单位根的原假设,因此认为所有变量都是一阶单整的序列。表3是3种检验结果的对比。
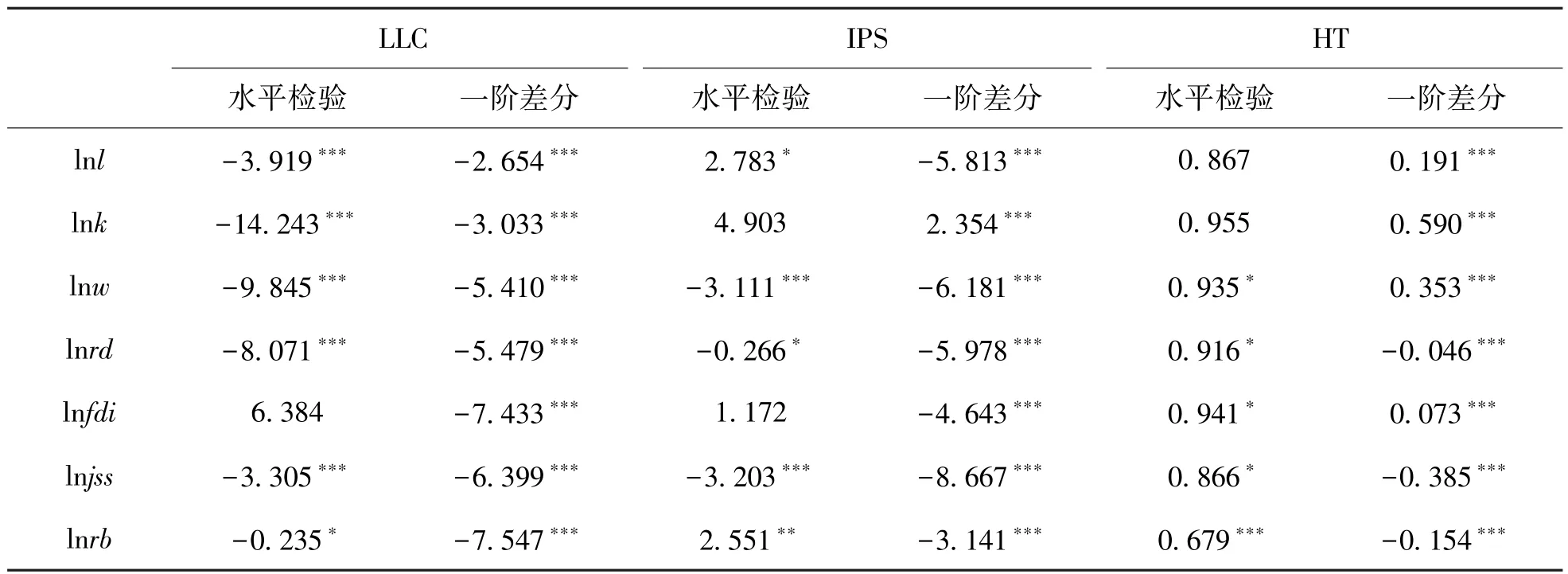
表3 变量的单位根检验
3.2 回归结果和分析
根据我国30个省市2005~2017年的数据回归结果,工业机器人的使用在1%的显著性水平上对我国劳动力就业存在负向影响,影响系数为-0.148,即工业机器人的使用对我国劳动力就业的整体替代效应约为0.15个百分点。该实证结果也验证了前文的假设2,即资本与劳动存在明显的替代效应,工业机器人作为一种内生的技术进步,可以加速资本积累的过程,以全要素生产率为主要传导机制,通过提高企业的生产率,对企业的管理水平、生产过程造成影响,从而影响就业。
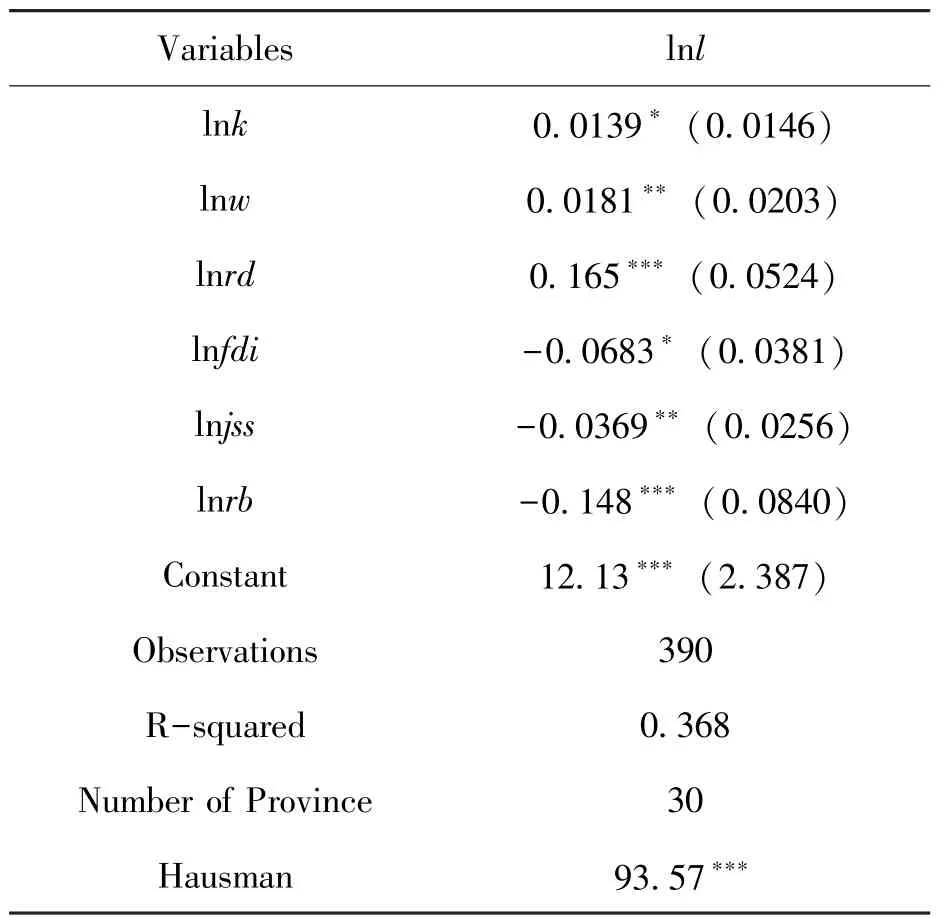
表4 模型拟合结果
实证研究也表明,企业的资本存量、实际工资、自主研发、技术市场引进等因素也对劳动力就业存在影响,其中资本存量、实际工资的增加及自主研发创新的提高会对就业产生正向影响,且在回归结果上显著,技术引进对劳动力就业产生负向影响。外商直接投资(FDI)对就业的影响为负,且在10%的水平上显著,个人认为主要是外商直接投资对就业存在双重影响,投资扩大需求会促进就业,但外商直接投资与我国自有资本存在竞争关系,挤出我国自有资本造成就业下降,同时外商直接投资可以带来技术进步,从而提高劳动生产率,抑制就业。
4 研究结论及政策建议
本文基于我国30个省市2005~2017年的数据,构建计量模型对我国工业机器人应用的就业冲击效应进行了实证分析,研究发现工业机器人以生产率为主要传导机制,对我国劳动力就业产生显著替代效应。我国正处于经济转型升级的关键时期,智能制造已经成为我国的战略性目标,未来制造业必然向着自动化和智能化的方向发展,对生产效率和产品精度的要求将会进一步提高,因此各大行业对工业机器人的需求也会越来越高,随着工业机器人在生产制造应用中的快速增长,由此带来的劳动力就业问题将成为长期需要解决的民生问题。因此本文根据研究结论,针对如何稳定劳动力就业、提高社会总体福利,提出如下政策建议:
(1)加大教育和培训投入,引领劳动力向高技能发展。工业机器人属于技能偏向型技术进步,目前在行业中的应用主要集中在焊接、组装、搬运等体力性、程序性的工作任务上,对低技能劳动力产生明显的替代,而在一些高技能、抽象性的工作领域还没有发现机器人对劳动力的规模替代,另外如操作、管理和控制机器人等任务则对劳动力提出了新的需求。因此,现阶段解决就业的主要解决方案之一是提高劳动力的专业技能,引导企业和市场化培训机构参与针对技术变化的劳动力培训,加强高技能劳动力的培养,使劳动力具备胜任 “创造和补偿机制”下带来的新岗位的技能,如机器人的技术研究、操作控制和维护管理等。
(2)鼓励新型业态发展,创造更多就业机会。从长期发展来看,未来随着工业机器人产业的发展,必将带来一些新的产业发展,为劳动力提供新的就业岗位,如工业机器人的研发、生产制造以及操作控制等,因此积极发展工业机器人、人工智能等新兴产业和新型业态,强化就业引导和就业服务,放大工业机器人带来的就业创造效应,让其吸纳更多劳动力,是解决就业问题的一个重要方向。此外,服务业作为我国目前吸纳劳动力就业最多的行业,其对劳动力的吸纳能力远高于工业,鼓励我国服务业进行商业模式创新,促进新的服务模式发展,挖掘第三产业的就业吸纳能力,也是提高我国就业总量的一个有效方式。
(3)完善社会保障制度和失业扶持政策。目前工业机器人的应用领域主要集中于低技能领域,替代的是体力性、程序性的工作,考虑到技术进步的技能偏向性特点,未来工业机器人在生产中的规模应用必然导致高技能劳动力和低技能劳动力之间的收入差距越来越大。因此,为保障社会公平,避免收入差距过大,政府应该针对低技能劳动力出台相关的就业扶持政策和失业保障制度,健全就业服务体系,为低技能劳动者就业提供相关的就业咨询和技能培训。
猜你喜欢
走向世界(2022年3期)2022-04-19 12:39:10
核科学与工程(2021年4期)2022-01-12 06:30:26
今日农业(2021年1期)2021-03-19 08:35:16
今日农业(2020年24期)2020-12-15 16:16:00
今日农业(2020年19期)2020-12-14 14:16:52
华人时刊(2019年15期)2019-11-26 00:55:50
中学物理·高中(2016年12期)2017-04-22 11:53:03
华南农业大学学报(社会科学版)(2015年3期)2016-01-11 11:46:23
上海企业(2014年9期)2014-09-22 20:45:10
上海企业(2014年9期)2014-09-22 20:42:16
