浅析一种姿态系统的实现方法
2020-05-26 02:18苏瑞邓宇孙瑜
科学与信息化 2020年8期
苏瑞 邓宇 孙瑜


摘 要 本文给出了一种小型姿态系统的实现方法,介绍了该系统的硬件框图及数据解算。该系统基于MEMS器件搭建,采用模块设计,可实现小机动情况下的高精度姿态测量。最后给出机载试验的验证结果。
关键词 姿态系统;传感器
引言
在小型飞行器中,由于其本身的体积和重量都很小,要求飞行器導航系统上应用的运动测量设备既要保证一定的精度,又能尽量减小导航设备的体积和重量。传统的机械转子陀螺结构复杂,易磨损、寿命短,激光陀螺和光纤陀螺性能稳定、可靠性高,但其高昂的价格限制其在某些场合的应用。相比之下,基于微电子机械系统(MEMS)器件而搭建的惯性系统具有体积小、功耗低、质量轻、响应快、灵敏度高、成本低等优点,加以滤波和算法修正,可以达到在小型飞行器上的应用要求。
1系统概述
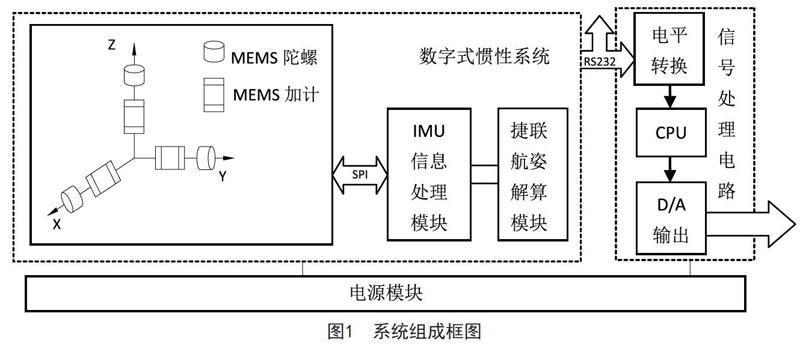
本姿态系统采用基于MEMS三轴陀螺仪和三轴加速度计构建的惯性系统,通过内置高性能处理器,采用捷联惯性姿态算法实现静态和动态角度测量。其中三轴加速度用于跟踪静态角度解算,三轴陀螺用于跟踪动态角度解算。可以测量的姿态参数包括全姿态横滚角、俯仰角、角速度和加速度等8路信号,通过RS232格式信号编码输出,并可通过D/A转换器以模拟信号形式输出各路信号,输出信号与角度/角速度/加速度呈线性关系。系统组成框图如图1。
2工作原理
本姿态系统采用模块化设计,包括电源模块、数字式惯性系统(包含IMU信息处理模块和捷联航姿解算模块)、DA输出模块、壳体和接插件等功能单元。
2.1 电源模块
电源模块用于将机载28V电源转换为信号处理电路和数字式惯性系统所需的15V供电,主要包括极性保护及干扰滤波两部分,电路原理如图2所示。极性保护电路采用二极管极性保护电路D2,选用1N4148型开关二极管。电磁干扰滤波电路选用有关厂家推荐的典型参数。
2.2 数字式惯性系统
数字式惯性系统通过内置高精度6自由度惯性测量单元IMU实现载体的三轴向角速率和加速度测量。其中三轴向陀螺用以敏感载体运动角速度,经信号预处理后,提供载体姿态计算原始信息,最终通过姿态四元数算法计算载体姿态信息。由于陀螺精度较低,漂移较大,长时间工作不能保证测量精度。利用三轴向加速度计测量重力在载体三轴向上的分量,可以计算出载体相对于当地地理水平面的倾角。由于加速度计测量精度较高,其角度解算精度也很高,因此可利用加速度计输出作为观测量,采用卡尔曼滤波器构造一个可变增益的闭环反馈系统,来修正因陀螺漂移造成的姿态误差,从而实现动静态运动条件下载体姿态的高精度测量。工作原理如图3所示。
2.3 D/A输出模块
D/A输出模块包括D/A转换部分和信号放大、滤波部分。其中D/A转换采用专用四通道转换芯片AD5324,该芯片为12位单极性信号输出,输出信号范围为0V~Vref。
为了提高放大电路的精度、方便调零和滤波电路的设计,放大电路采用了两级放大,采用美国AD公司的OP297芯片。该芯片内部集成两个运算放大器,具有低输入偏置电压、高开环增益、低噪声密度等突出特点。第一级为减法电路,由RefF02Bu及电阻网络产生约0.94V基准电压Vref,反向放大2倍后与D/A输出电压值叠加,输出-1.875V~1.875V电压信号。第二级为反向放大、滤波电路,通过电阻网络设定其增益为-2、通带截止频率为10Hz,从而把上级输出放大成稳定的-3.75V~+3.75VDC双极性标准电压信号。原理图如图4所示。
2.4 软件解码算法
数字式惯性系统的输出为RS232信号格式的数据包,需对其解码运算后再送入D/A转换模块。
数据包为37字节的十六进制数,格式如图5所示。依次为通信协议起始字符(数据包头)、横滚角、俯仰角、偏航角、三轴向角速率、三轴向加速度、温度、时间、状态信息和CRC校验码。此处提取横滚角、俯仰角、三轴向角速率和三轴向加速度共8路信号进行标度转换,转换为输出电压信号。
以横滚角为例,解算公式为:
横滚角=接收数据/(65536/量程)=接收数据*量程/65536 (1)
输出电压=横滚角*(电压量程/角度量程) (2)
由于采集数据为实数,编码时采用补码,首先要对补码进行范围转换,再根据实际应用的量程对数据范围进行截取限定。按照公式1、公式2进行解算和标度转换后,进行CRC校验,如无误码,则输出转换的电压,出现误码则丢弃该数据包,重新接收。
3试验验证
该姿态系统经两次机载试验,与机载地平仪的输出信号进行比对。
试验中平飞、悬停、机动产品输出正常,动态跟随性好,但在连续大机动、加速-平飞-悬停段,产品输出发散,误差大。因此该系统仅能应用在小机动条件下。数据如图6、图7所示。
4结束语
由试验结果可知,该系统质量轻、响应快、灵敏度高,可满足小机动条件下的小型飞行器的姿态测量。该小型姿态系统目前已装机使用。
参考文献
[1] 张谦,裴海龙,罗沛.基于MEMS器件的姿态航向参考系统设计及应用.2007,28(3):631-634.
[2] 黄旭,王常虹.基于微机械惯性器件和磁强计的姿态航向系统.2005,24(8)54-56.
猜你喜欢
科学与财富(2021年34期)2021-05-10
现代信息科技(2021年21期)2021-05-07
智富时代(2018年3期)2018-06-11
智富时代(2018年3期)2018-06-11
计算机应用(2016年10期)2017-05-12
山东工业技术(2016年8期)2016-04-14
中学生数理化·八年级物理人教版(2014年1期)2015-01-09
中学生数理化·八年级物理人教版(2014年1期)2015-01-09
计算技术与自动化(2014年1期)2014-12-12
中学生数理化·八年级物理人教版(2014年2期)2014-04-02