
基于信号和车辆系统联控的弓靴转换控制设计研究
2020-05-25 02:37方向明
现代城市轨道交通 2020年5期

摘 要:广州地铁 4 号、5 号、6 号、14 号、21 号线运营线路采用第三轨集电靴受流方式,车辆段采用接触网受电弓受流方式,列车在进出车辆段时,需在弓靴轉换点处进行降弓升靴或降靴升弓的操作,传统“人防”监控方法是人工监控与视频监控。文章研究利用信号定位、车辆控制软件联控的方式,实现列车弓靴转换由“人防”向“技防”的转变,设计研究成果已在广州地铁 14 号、21 号线车辆段出入段线弓靴转换点处成熟应用。该设计研究方案能优化列车出入场管理、节约人力资源,并从根本上解决人工未按要求进行弓靴转换而产生的安全风险。
关键词:地铁车辆;弓靴转换;联动监控
中图分类号:U231
1 研究背景
城市轨道交通车辆通过受流器与接触导线(接触网或第三轨)滑动接触,从供电电网吸收电能,常用的取流方式包括受电弓受流以及集电靴受流2种。广州地铁14号、21号线采用6节编组、120 km/h的B型列车,采用受电弓或集电靴受流的方式,即车辆段为1 500 V接触网供电,运营线路为1 500 V直流接触轨供电。
当列车从车辆段驶入运营线路或从运营线路驶回车辆段时需转换受流模式。以从车辆段驶入运营线路为例,司机需手动操作降弓按钮,使列车车顶受电弓降下,并同时手动操作升靴按钮,使车底集电靴升起,实现列车供电受流方式的转换,此过程为升靴降弓。列车从运营线路驶回车辆段时的动作则刚好相反,称为升弓降靴。弓靴转换点位于车辆段出入段线处,轨旁设置有信号机、应答器等信号定位设备。当列车从车辆段驶入运营线路区域时,若在弓靴转换点处未降弓升靴,或从运营线路驶回车辆段时未降靴升弓,都将导致受电弓或集电靴受到撞击损坏或列车失电停车等安全事故。因此,确保列车在弓靴转换点完成弓靴转换,是保证安全行车的重要环节之一。
广州地铁4号、5号、6号、14号、21号线线路均采用库内受电弓受流、运营线路集电靴受流方式,且11 个段场共计22条出入场线,共配属列车233列,年均操作弓靴转换多达17万次,存在较高的安全风险。2012年5月,广州地铁5号线鱼珠车辆段发生1起因司机未操作降弓出段导致列车在出段线洞口撞弓的严重安全事件。
为避免在弓靴转换点未完成弓靴转换导致撞弓或撞靴的隐患,广州地铁主要采用人工模式(安排作业人员至转换轨处目视监控确认弓靴状态,以及通过转换轨处的洞口摄像头监控,并实时与司机、行车调度进行沟通确认弓靴状态)以及视频监控(通过专用摄像头实时监控列车受电弓状态,并将画面实时传输给行车调度,再由行车调度确认降弓动作是否完成)的方式进行弓靴状态的监控,此2种方案增加人为沟通确认环节,降低作业效率,且无法从根本上排除人为疏忽导致的隐患点。文章研究利用列车车载信号系统能够实时提供位置信息的特性,将弓靴转换点进行标定,为列车定位,即在弓靴转换点的位置增加出段时未降弓、回段时未降靴则列车牵引封锁的方案,开展列车弓靴转换由“人防”向“技防”转变的无人监控模式研究。
2 弓靴转换控制方案设计
2.1 控制基本原理
基于信号和车辆联控的列车弓靴转换控制方案基本原理是在列车进出车辆段时,车辆控制和管理系统(TCMS)实时监控列车弓靴状态,再结合信号系统发送的列车定位信息,对司机操作进行预警提醒以及实施牵引封锁的功能。
2.2 控制方案设计
基于信号系统能将列车实时位置信息发送至TCMS系统的原理,采用信号定位+车辆软件控制方式实现无人监控弓靴转换点,即在弓靴换点前A(暂定40 m)范围内触发预警信息提醒司机降弓升靴;在弓靴转换点前B(暂定20 m)至弓靴转换点后C(暂定20 m)范围内未降弓则实施牵引封锁,列车无法启动。如图1所示。
2.2.1 车载信号系统定位
广州地铁14号、21号线车载信号系统存储了线路的数据库,该数据库中包括线路的应答器、轨道分区、道岔、线路状态等信息。车载信号系统通过轴端速度传感器获取列车的运行速度、运行方向、运行距离信息,并在发生非预期移动(如空转、滑行)时通过测速雷达进行位移补偿。当列车经过应答器时,列车车载信号系统会收到应答器发送的包含识别编号(ID)的报文,结合信号系统轴端速度传感器获取的实时速度进行一系列运算,从而确定列车的位置。列车每检测到1个有效的应答器报文就会进行1次位置信息校准,以此纠正轴端速度传感器和测试雷达长时间计算而产生的误差,从而实现列车精准定位。
2.2.2 车辆系统控制
广州地铁14号、21号线TCMS系统为车载分布式列车电子控制系统,是为轨道车辆的控制和通信而设计的一套车载计算机系统。它以列车整车计算机网络为基础,广泛地采用电子控制设备和串行数据通信代替继电器、接触器和直接硬连线,并且通过网络连接各个子系统的控制设备(如牵引控制、摩擦制动控制等),执行列车运行数据信息采集、管理和列车控制的功能,综合分析信息采集模块的数据、司机操作指令等信号,按照预先录制的程序进行缜密运算及逻辑处理,输出列车各部件的操作控制指令,对列车整车、各子系统以及其他车载系统进行集散控制。
文章提出的方案中TCMS系统实现的功能如下。
(1)当列车进入降弓提醒区域,若未降弓则在司机显示屏进行提醒“进入弓靴转换区注意降弓升靴出库”并持续发出蜂鸣声报警。
(2)当列车进入牵引封锁区域停稳,未降弓则在司机显示屏进行提醒“未降弓出库导致列车牵引封锁”, TCMS系统向牵引系统发送牵引封锁命令,列车无法启动。
具体控制逻辑如下。
(1)预警信息触发原理。在同时满足3个基本条件(即出段工况、列车位于预警触发区域、受电弓模式为1)时,列车显示屏会进行提醒“进入弓靴转换区注意降弓升靴出库”。
(2)牵引封锁触发原理。为确保列车运行安全,TCMS系统需对影响列车运行的所有状态信号进行实时监视,一旦有实时状态信号影响列车行车安全时,TCMS系统将封锁列车牵引指令。在同时满足4个基本条件(即列车零速、出段工况、列车位于牵引封锁区域、受电弓模式为1)时,车辆控制屏会进行提醒“未降弓出库导致列车牵引封锁”。
3 弓靴转换控制方案工程验证
3.1 轨旁设备分布及功能
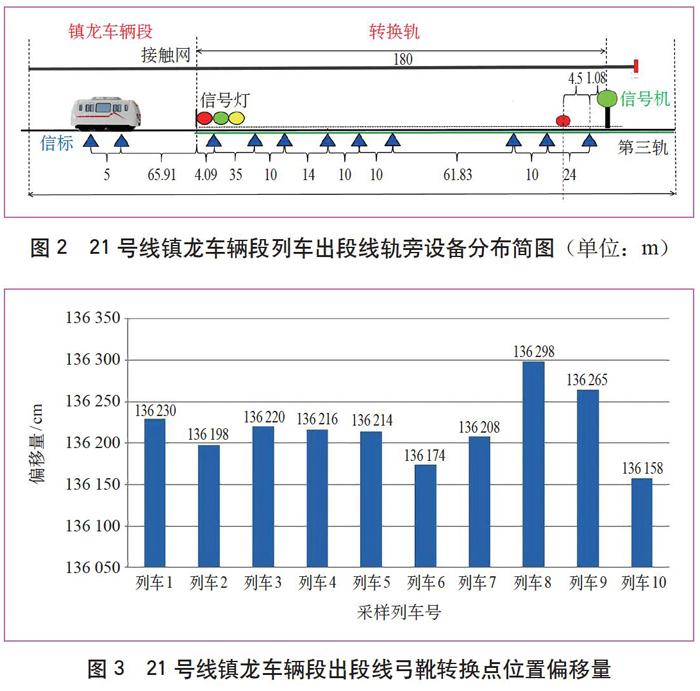
广州地铁21号线镇龙车辆段出入段线信号轨旁设备主要包括:軌旁无线单元或接入点(AP)、无线天线、计轴磁头和检测单元、信标、道岔、信号机等设备,相关设备位置分布简图如图2所示。
车载信号定位系统主要包括:查询器、射频模块(RF)、天线、信标等设备。前3个基本组件安装在列车上,信标单独安装在线路上的关键位置,决定列车的位置。RF模块生成射频信号,天线将信号传播到外界。在列车运行过程中,当信标接收到该射频信号时,信标将包含信标唯一编码信息的原始信号的变换形式反馈回天线,RF模块解调该信号,并对其进行预处理,然后将其传送至查询器,随后查询器处理该信息,并经串行链路将其传送至车载信号控制设备(VOBC),将编码信息处理成车辆接收的偏移量(列车进入某一个区段,车头距离下一个区段起始位置的距离),供车辆系统识别列车位置信息。
3.2 降弓提醒及牵引封锁点区域设置
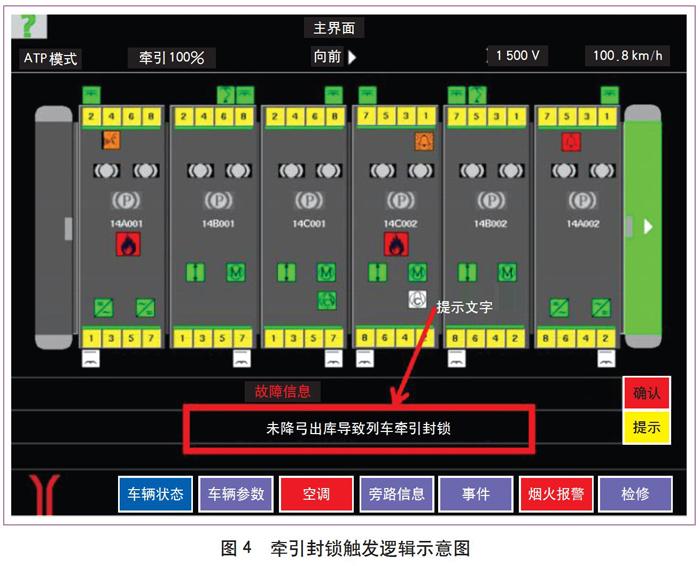
根据广州地铁21号线项目车辆信号接口协议,VOBC将列车所在的区段信息以及偏移区段小里程的偏移距离信息发送给车辆。根据21号线信号设备平面图,镇龙车辆段21号线出段线弓靴转换点所在的区段编号为287,通过对该区段30列次(不同日期、不同车次)进行弓靴转换点数据采样,列车弓靴转换点平均偏移量在136200±50cm范围内,采样数据如图3所示。确定弓靴转换点平均偏移量为136200cm(50cm忽略不计),设置降弓提醒区域为138200~140200cm;牵引封锁区域为134200~138200cm。
3.3 TCMS 系统实现降弓提醒及牵引封锁功能
TCMS系统对列车位置(所在区段号及偏移量信息)以及受电弓状态进行采集,并对采集数据进行逻辑运算分析,增加车辆显示屏预警显示,多次进行功能验证,结果为:在弓靴转换点前40 m,车辆显示屏显示“进入弓靴转换区注意降弓升靴出库”提示信息;分别测试在弓靴转换点前20 m、弓靴转换点前10 m、弓靴转换点处停下,列车产生牵引封锁,车辆显示屏弹出“未降弓出库导致列车牵引封锁”。如图4所示。牵引封锁和预警信息显示均与设计要求一致。
3.4 运用现状
广州地铁14号、21号线共配属63列车,每天出入段共进行120余列次弓靴转换,应用近半年时间,共进行20 000余列次弓靴转换,现弓靴转换无人监控设计运用情况良好,取代了以往的人工模式以及视频监控方式,提高了列车出入段效率及安全性。
4 结束语
基于信号和车辆系统联控的弓靴转换控制设计,在国内轨道交通领域属于首次应用,并已在广州地铁14 号、21号线车辆段出入段线弓靴转换点处实际应用近半年时间,能够在预警区域范围内对列车司机进行有效提醒,在牵引封锁区域范围内对未降弓列车实施牵引封锁,取代了传统的人工模式以及视频监控方式,实现从“人防”向“技防”方式的转变,并优化了人力资源配置,从根本上解决了弓靴转换点的安全风险,同时为后续类似项目应用提供宝贵经验。
参考文献
[1]GB 50157-2013 地铁设计规范[S]. 北京:中国建筑工业出版社,2013.
[2]魏瑞新. 广州地铁4号、5号线列车降弓视频监控系统简介[J].中国新通信,2014(10):112-113.
[3]万连录, 吴积钦, 韩峰. 受电弓-受流靴受流方式转换的研究[J].都市快轨交通,2006(8):87-89.
[4]陈微, 魏刚, 钟敏富. MTC-I型CBTC系统列车定位及追踪分析[J].地铁科技,2017(2):48-52.
[5]陈国清,郑玄. 广州轨道交通21号线车辆研究[J].电力机车与城轨车辆,2016,39(6):31-34.
[6]张海丰,陈恒谦,郭彦每.第三轨受流器研制[J].机车电传动,2013(6):46-47.
[7]罗斌. 广州地铁4号线列车双制式受流方式分析[J]. 铁道机车车辆工人,2011(5):17-21.
[8]孙放心. 广州地铁4号线直线电机车辆集电靴系统分析[J]. 电力机车与城轨车辆,2009,32(1):46-49.
[9]刘春花.基于城市轨道交通CBTC系统中通信延迟对列车追踪间隔的影响分析与研究[J].数字通信世界,2019(1):55-56.
[10] 白广争.城市轨道交通 CBTC 系统互联互通运营测试平台研究[J].铁道运输与经济,2019(4):113-117.
[11] 金华.城市轨道交通全自动无人驾驶信号系统功能分析[J].铁路计算机应用,2014(1):61-64.
[12] 刘长远,刘霄,李绍博.列车网络控制系统安全性研究[J].城市轨道交通研究,2013,16(4):1-4.
[13] GB/T 28029.1-2011牵引电气设备列车总线第1部分:列车通信网络[S].北京:中国标准出版社,2012.
[14] 赵强,常振臣,李砾工,等.国产化列车网络控制系统安全完整性等级评估与认证[J].机车电传动,2011(6):1-5.
[15] 聂晓波.轨道车辆MVB 网络实时性能分析与优化研究[J].铁道学报,2011(9):40-44.
收稿日期 2020-01-13
责任编辑 司玉林
Design and research of pantograph shoe conversion control based on joint control of signal and vehicle system
Fang Xiangming
Abstract: The operation tracks of Guangzhou metro lines 4, 5, 6, 14 and 21 use the current collection mode of the third rail collector shoe, and the depots use both the current collection mode of the pantograph and overhead contact system. When arriving and departing the depots, it is necessary to lower or raise the pantograph shoe at the transitional point. The traditional Staff Governing monitoring method is manual monitoring and video monitoring. In this paper, signal positioning and vehicle control software for joint control are used to realize the transitional run of train bow shoe from Staff Governing to Technique Governing. The design and research results have been used in the transitional point of pantograph shoe in the arrival and departure section of Guangzhou metro lines 14 and 21. The design and research scheme optimizes the management of train arrival and departure, save human labor resources, and fundamentally eliminate the safety risks caused by the manual operation without following to the requirements of pantograph shoe shift.
Keywords: metro vehicles, pantograph shoe conversion, linkage monitoring
作者簡介:方向明(1986—),女,工程师
猜你喜欢
科学与财富(2021年33期)2021-05-10
科学家(2021年24期)2021-04-25
科学家(2021年24期)2021-04-25
电子乐园·中旬刊(2020年8期)2020-09-10
科技资讯(2018年13期)2018-10-26
红领巾·萌芽(2014年3期)2014-11-25
计算机辅助工程(2012年5期)2012-11-21
科技传播(2012年10期)2012-06-06
