BDS高精度动态检测系统的设计与实现
2020-05-23 06:06王琛琛徐学永王清太周叶施金金
全球定位系统 2020年2期
王琛琛, 徐学永, 王清太,周叶, 施金金
(北方信息控制研究院集团有限公司,江苏 南京 215200)
0 引 言
北斗卫星导航系统(BDS)是我国自主建设、独立运行的卫星导航系统,可为全球用户提供全天候、全天时、高精度的定位、导航和授时服务.BDS按照“三步走”计划进行建设,2018年12月27日,北斗三号(BDS-3)基本系统已完成建设,开始提供全球服务.目前,BDS全球服务性能为:定位精度水平10 m(95%)、高程10 m(95%),测速精度0.2 m/s(95%),授时精度20 ns(95%),系统服务可用性优于95%.其中,在亚太地区,定位精度水平5 m(95%)、高程5 m(95%)[1-3].
随着BDS的建设和服务能力的发展,相关的卫星导航产品已广泛应用于交通运输、航洋渔业、水文监测、气象预报、通信时统等领域,逐步渗透到人类社会生产和人们生活的方方面面[4].作为用户与卫星导航系统唯一接口的BDS用户设备形态多种多样,呈现多元化、综合化和更新快等诸多特点,而其性能的优劣、质量的高低、安全可靠与否将直接影响到广大用户和消费者的切身利益,影响到行业安全,甚至影响到我国BDS产业能否健康发展,应用市场能否形成规模.因此,在BDS用户设备进驻市场前,要进行相关性能的检测.
对于BDS用户设备而言,动态性能是衡量其性能的关键技术指标.目前国内外学者针对全球导航卫星系统(GNSS)动态性能检测做了相关的研究,主要是如何建立合适的动态检测基准,提出了不同的测试方法、评价指标,并设计了不同的检测系统,如2002年美国R.K.Talor等[5]利用直线铁轨坐标来校核接收机的动态性能;2008年何峰等[6]设计了旋转平台的检测系统,利用天线相位中心稳定的运行轨迹推算动态运行过程中位置,评价动态定位的性能;2014年王博等[7]提出了基于双天线法的检测方法,两台终端同时完成动态定位后,解算出每个历元的几何距离与地面测量的精确距离并进行比对,以效验检测终端的动态定位精度;还有学者提出利用光学原理辅助、模拟器仿真等检测方法[8-12].这些方法存在着几何轨迹标定误差、运动轨迹单一、时间系统统一和坐标系统统一等问题,且均采用测试数据事后处理方式,测试中异常情况无法及时告知,测试过程不可控.
基于此,本文设计了一种基于车载的高精度动态检测系统,称为BDS高精度动态检测系统(BDHDS).该系统通过高精度基准设备和测试设备共源的方式解决时空统一问题,利用评估软件对测试设备进行集中管理并实时处理分析测试数据、显示测试结果并自动生成结果报表,同时利用监控设备记录测试过程,可实现真实环境下用户设备的动态性能的高效测试.
1 系统组成及工作原理
1.1 基本组成
BDHDS以依维柯车辆为载体,对车辆后舱改装后进行构建,主要包括测试基准模块、测试用户设备接入模块、供配电模块、信号采集回放模块、监控模块以及测试控制与评估模块,如图1所示.

图1 检测系统的基准组成框图
1.2 系统工作原理
BDHDS测试用户设备接入模块、供配电模块为BDS用户设备测试提供了接入条件,测试基准模块提供了测试比对基准.BDS用户设备接入系统后,可将测试数据实时上传到测试控制与评估模块中,测试控制与评估模块完成对数据的存储、解析、评估并把实时结果显示出来,同时信号采集与回放模块、监控模块完成测试期间卫星信号的采集、测试环境的录制以及测试过程的监控.测试结束后,测试控制与评估模块可自动生成测试报表,最终可控、高效地完成BDS用户设备的动态性能的检测.
2 系统设计
2.1 测试基准模块设计
测试基准模块为BDS用户设备的动态性能测试提供实时基准,主要由GNSS天线、GNSS接收机、惯性测量单元(IMU)以及线缆组成.GNSS接收机接入测试点附近连续运行参考站(CORS)实时动态(RTK)数据和IMU进行深度耦合,输出高精度的位置和姿态基准信息.测试时,基准数据经RS232串口送到测试控制与评估模块.
测试基准模块采用双GNSS天线方式,车辆处于低动态环境下,双天线解算得到的姿态角能够有效抑制姿态角的累计误差,此外双天线还能实现惯导的快速初始化.经调研分析比较,本检测系统选用目前国际上较先进的NovAtel 公司SPAN IMU-ISA-100C惯性组合导航设备作为测试基准,其中IMU经精确标校后固定于车辆内部,经第三方检测机构检测鉴定,基准的精度(RMS)为
1) 卫星失锁0 s:水平精度:0.02 m+1 ppm,高程:0.05 m+1 ppm,姿态:横滚:0.007°,俯仰:0.007°,航向:0.01°;
2) 卫星失锁10 s:水平精度:0.07 m+1 ppm,高程0.10 m+1 ppm,姿态:横滚:0.008°,俯仰:0.008°,航向:0.012°.
2.2 测试设备接入模块设计
测试设备接入模块为基准设备和BDS用户设备提供信号接入方式,由信号接收层、信号转发层构成.信号接收层主要由主、从GNSS测量型天线、通信天线(GPRS/CMMB)组成,用于接收BDS(包括BDS-3)、GPS等卫星信号以及通信信号,信号接收层的设备固定置于车顶.信号转发层主要由卫星信号转发器、手机信号增强系统、功分器、测试微波暗箱及配套线缆组成,用于转发、分配信号接收层接收的信号,供基准设备和待测BDS用户设备接入.本检测系统的主要信号流程如图2所示.
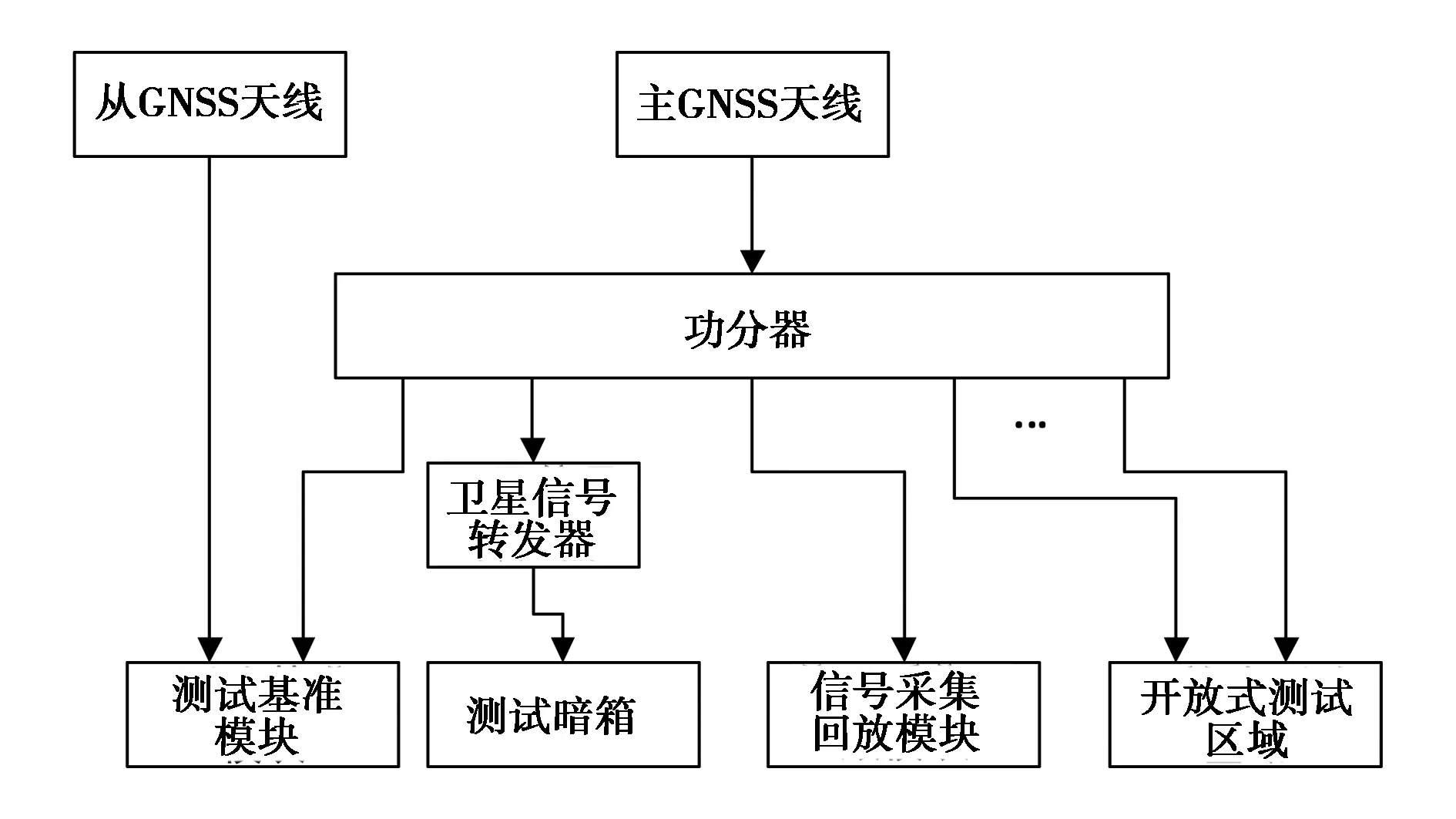
图2 检测系统的主要信号流程图
其中,测试暗箱为一体式BDS用户设备性能的检测提供环境,开放式测试区域为分体式BDS用户性能的检测提供条件.
2.3 供配电模块设计
供配电模块主要由数字电源总成、UPS和蓄电池组成[13],该模块给测试基准设备、待测BDS用户设备及检测系统中其他电子设备供电.
2.4 信号采集回放模块设计
信号采集回放模块采用全频段导航信号采集回放仪,连接到测试设备接入模块,可将测试外场实际卫星导航信号采集后,以记录的形式存储于设备内部,并能够进行多次回放,为检测系统的数据事后分析提供参考.
2.5 监控模块设计
监控模块由行车记录仪、双侧摄像头、暗箱摄像头、内部全景摄像头、硬盘录像机和存储硬盘等组成.行车记录仪用于监控车前道路情况,双侧摄像头用于监控道路两侧的情况,暗箱摄像头监控暗箱内一体式BDS用户设备状态,全景摄像头监控测试过程,硬盘录像机和存储硬盘完成监控视频的录像存储.该模块主要录制实际测试场景,为事后数据分析所用,同时保证检测过程透明、可控.
2.6 测试控制与评估模块设计
测试控制与评估模块是检测系统的关键部分,主要完成基准设备及被测设备的设置管理,数据的接收、存储、解析、处理,测试结果的显示,测试记录表的生成,测试过程中的监控显示以及测试数据事后分析等功能.测试控制与评估子系统主要由串口服务器、网络交换机、工控机、机架式与吸顶式两种液晶显示器以及测试评估软件组成.
考虑到动态测试信息反馈的实时性以及可视化效果,测试评估软件采用JavaScript进行开发[14].测试评估软件的流程如图3所示,基本参数设置完成后,通过接口管理模块接入基准设备以及BDS用户设备实时数据流,解析成功后实时统计用户设备的动态性能并显示,同时标绘行车轨迹,测试结束后自动生成测试结果报表.对于文件数据,也可进行处理分析.测试评估软件主界面如图4所示.
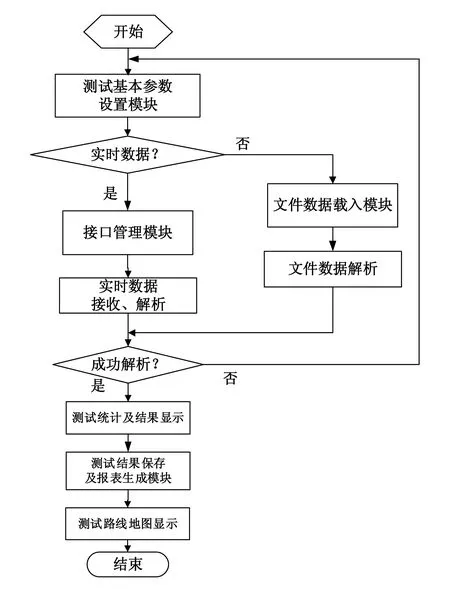
图3 测试评估模块软件设计

图4 测试评估软件主界面图
3 试验验证
为了验证BDHDS的正确性和稳定性,选择较为开阔的南京市江宁区软件园某路线进行了静态试验和低速跑车动态试验(车速约45 km/h),如图5所示.另外选择宁宣高速某段进行了高速跑车动态试验(平均车速大于100 km/h),行驶路线如图6所示.测试设备选用不同厂家生产的两台BDS设备(以下简称BDS设备1号和BDS设备2号),该两款设备接收BDS地基增强系统播发的广域差分产品-轨道、钟差改正数以及电离层产品进行单频伪距差分定位[15],设备的定位性能指标均为:水平2.0 m(95%),高程3.0 m(95%).

图5 静态/低速动态试验图
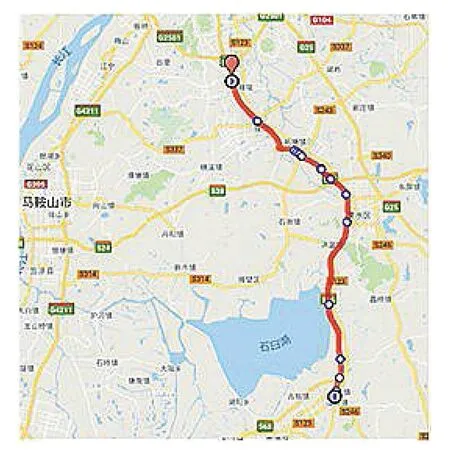
图6 高速动态跑车试验路线图
静态试验的时间设为2.5 h,低速跑车试验设为约1 h,高速的跑车试验设为约1.5 h.将测试设备和基准设备的定位结果进行实时比对,得到的各测试场景下的结果报表如表1所示,静态试验的误差时序图如图7~8所示,低速跑车试验的误差时序图如图9~10所示,高速跑车的误差时序图如图11~12所示.
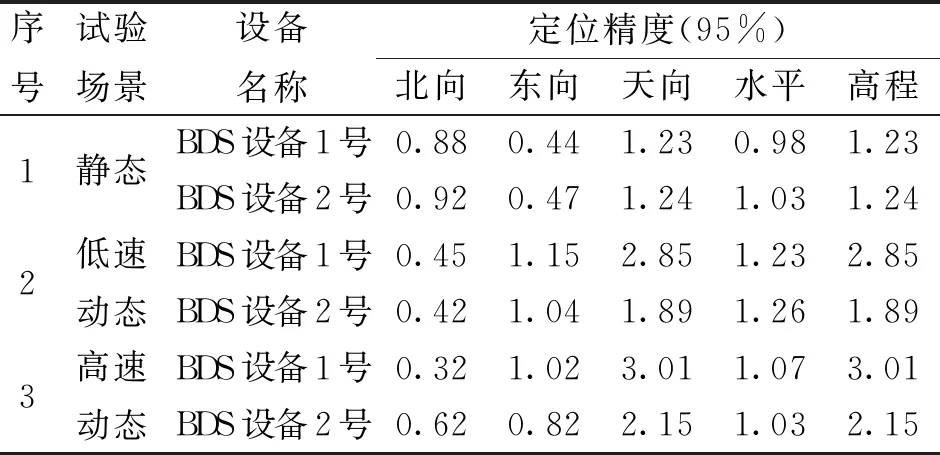
表1 试验测试结果 m
从图7~8可以看出,静态测试场景下,两台设备的定位精度相当,北向的定位精度优于1.0 m,东向的定位精度优于0.5 m,高程的定位精度优于1.3 m,且误差曲线较为平稳,没有出现跳变点.经分析是由于静态测试期间,测试周边环境良好.
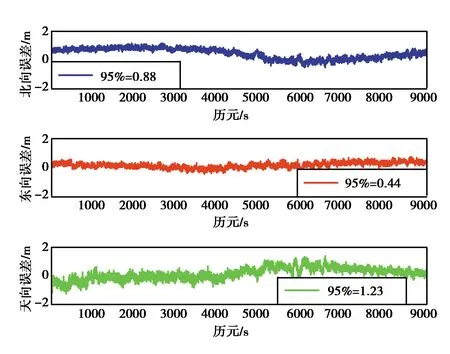
图7 BDS设备1号静态试验误差时序图
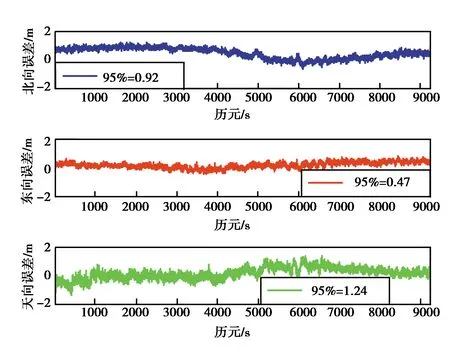
图8 BDS设备2号静态试验误差时序图
从图9~10可以看出,低速行驶状态下,两台设备北向的定位精度优于0.5 m,东向的定位精度优于1.2 m,高程的定位精度优于3.0 m,误差曲线偶有跳变.经分析是因为所选路段周边时有树木遮挡导致.
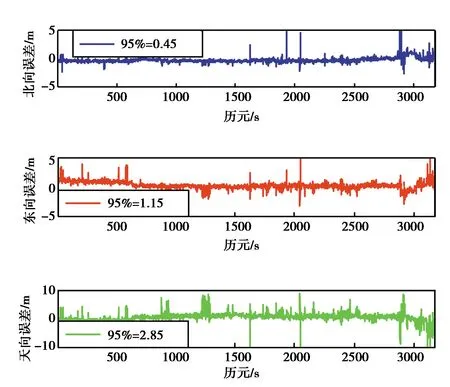
图9 BDS设备1号低速动态试验误差时序图

图10 BDS设备2号低速动态试验误差时序图
从图11~12可以看出,高速行驶状态下,两台设备北向的定位精度优于0.7 m,东向的定位精度优于1.2 m,BDS 1号设备的天向高程精度为3.01 m,BDS 2号设备的天向高程精度为2.15 m.此外在误差时序图,可以看出跳变点较多.事后结合系统监控设备图像进行分析,发现在试验中经过了几个高架桥,且有几辆大型卡车经过,路况相对复杂,导致卫星信号多次出现短暂失锁现象,如图13所示.
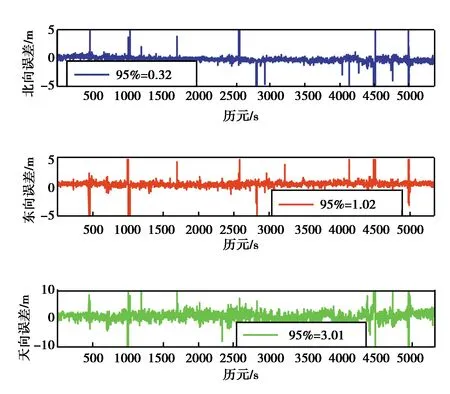
图11 BDS设备1号高速动态试验误差时序图
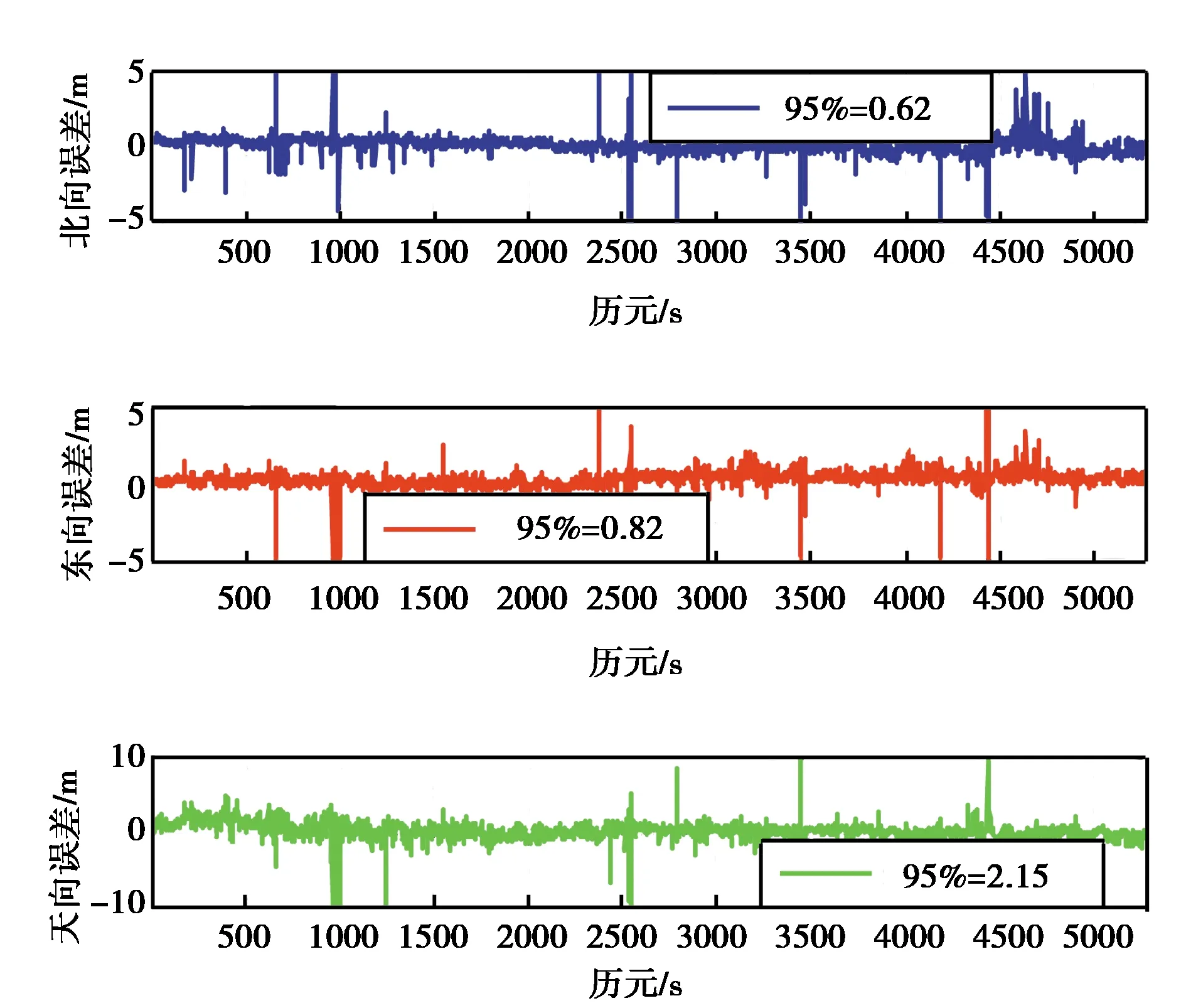
图12 BDS设备2号高速动态试验误差时序图

图13 某时刻高速动态跑车试验周边环境图
综上,除了高速动态试验BDS 1号设备高程略有超差外,无论是静态、低速动态还是高速动态场景,BDS 1号设备和2号设备的定位精度均符合厂家指标.此外BDHDS能真实地记录并还原测试场景,能自动生成测试结果报表.可见本文设计的系统可以直观准确高效地检测评估BDS设备的动态性能.
4 结 论
本文针对BDS用户设备动态性能的检测需求,设计了一种高精度动态检测系统.详细阐述了系统各个模块的功能、组成、工作原理以及具体实现途径,并进行了静态、低速动态和高速动态试验验证.试验结果表明该检测系统能够实现BDS用户设备的高效、自动化的测试,具有一定的先进性.由于本系统基准精度较高,未来也可满足更高精度的BDS-3用户设备(包括BDS组合导航设备)的动态性能的测试.
目前该系统已推广应用于“国家BDS地基增强系统”项目验收工作中,并发挥了重要的作用.
猜你喜欢
导航定位学报(2022年5期)2022-10-13
导航定位学报(2022年5期)2022-10-13
卫星应用(2022年7期)2022-09-05
卫星应用(2022年3期)2022-05-23
卫星应用(2022年1期)2022-03-09
北京航空航天大学学报(2021年9期)2021-11-02
导航定位学报(2021年4期)2021-08-29
好日子(下旬)(2020年6期)2020-08-04
环球慈善(2019年6期)2019-09-25
智富时代(2019年4期)2019-06-01