GDCORS多星系统定位平台测试与分析
2020-05-23 06:38邓思胜刘文建胡斯斌
全球定位系统 2020年2期
邓思胜,刘文建, 胡斯斌
(广东省国土资源测绘院,广东 广州 510500)
0 引 言
广东省连续运行卫星定位服务系统(GDCORS,以下简称“原平台”)于2006年建成并投入运行,已连续不间断运行10余年,可提供单GPS的网络实时动态(RTK)服务,服务成果精度相对稳定、可靠,获得用户的广泛认可.
为了进一步提升现代测绘基准社会化服务能力,推进现代测绘基准的广泛应用,按照广东省2017和2018年基础测绘项目计划要求,建成了GDCORS兼容多星系统的北斗地基增强平台(以下简称“新平台”). 为确保新平台服务的稳定、可靠,在平台正式投入运行前,组织开展了新平台与原平台的外业测试,以评估新平台多星定位服务的精度实际情况,并为GDCORS用户使用新/原平台提供实际应用参考.
预期新平台的实时精密定位精度由表1示出.
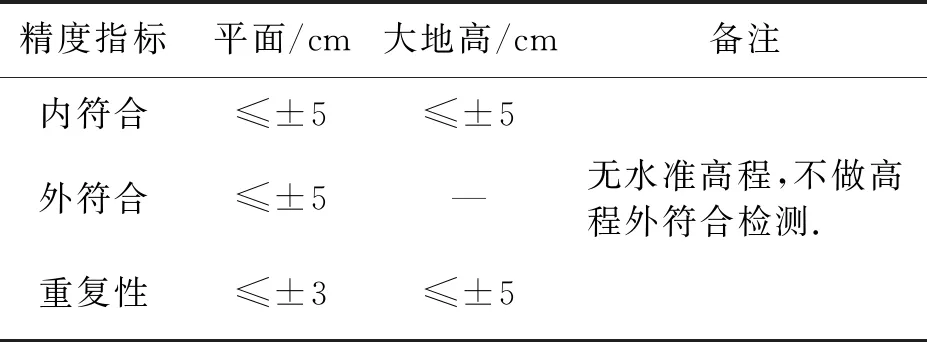
表1 实时精密定位精度技术指标
1 测试方案
1.1 方案设计
为了多方面考察多星定位服务系统,计划在粤东、粤北、珠三角和粤西四个区域,各选取1~2个地级市作为测试区,每个测试区选取20~30个等级点(C/D/E级控制点,同时要求尽可能提供控制点的CGCS2000坐标成果);每个点采用三脚架对中、整平后接入如表2所示的3种服务系统进行5个时段的观测,每个时段以1 s采样间隔观测不少于60个历元,从获得固定解开始记录测量结果,并填写观测记录表[1]. 为方便表述,新平台标识为Cur,原平台标识为Pri.
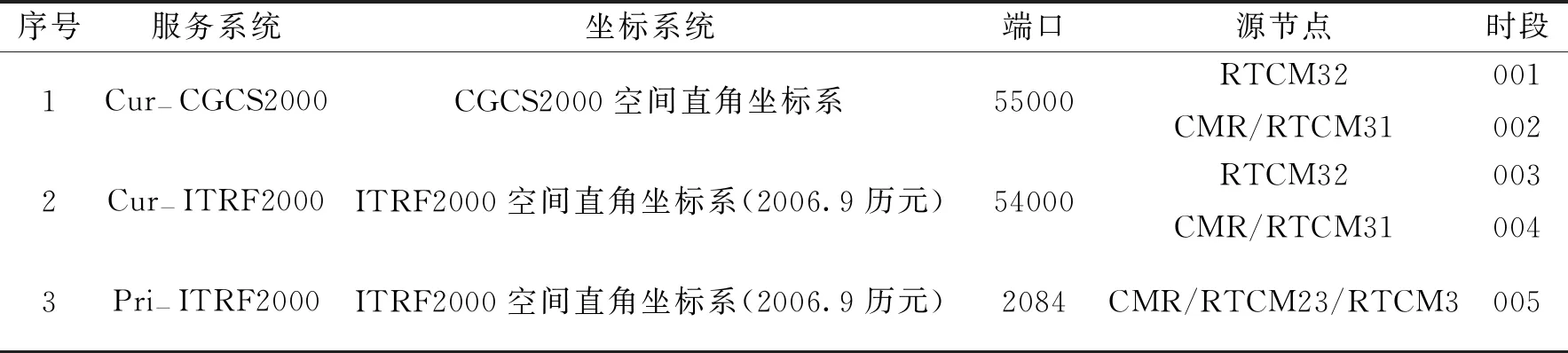
表2 外业测试服务系统及观测时段列表
表2中列明观测系统及时段的目的在于:
Cur-CGCS2000、Cur-ITRF2000两者各需接入不同差分数据格式的源节点来完成2个时段的观测,其目的在于考察系统平台对移动终端的兼容性;如缺少其中某个时段的观测数据并不影响后续的精度统计分析.
Cur-CGCS2000、Cur-ITRF2000两者用来考察新平台在不同坐标系统下的服务能力,特别是能否直接在CGCS2000空间直角坐标系下提供有效的实时精密定位服务;
Cur-ITRF2000、Pri-ITRF2000两者均运行在ITRF2000空间直角坐标系(2006.9历元),即GDCORS坐标框架,可以考察新旧系统定位服务的一致性.
Pri-ITRF2000已连续不间断运行10余年,服务成果精度稳定可靠,不是本次测试的重点,主要作为Cur-ITRF2000乃至新平台服务成果精度参考,特别是在控制点没有已知成果的情况下.
1.2 实施情况
本次测试经细化后具体划分为以下7个区域:肇庆高要市区域、广州番禺区域、珠海市区域、韶关市区域、河源市区域、揭阳市区域和清远市区域;每个区域1个小组,每个小组的成员包括3人(含司机),于2018年11月间完成了测试. 共获取178个测试点位成果,其中有145个点位上同时接入前述3种服务系统获取了观测成果;具体情况如表3所示.

表3 测试点接入观测系统情况
各服务系统的接入观测情况如表4所示.
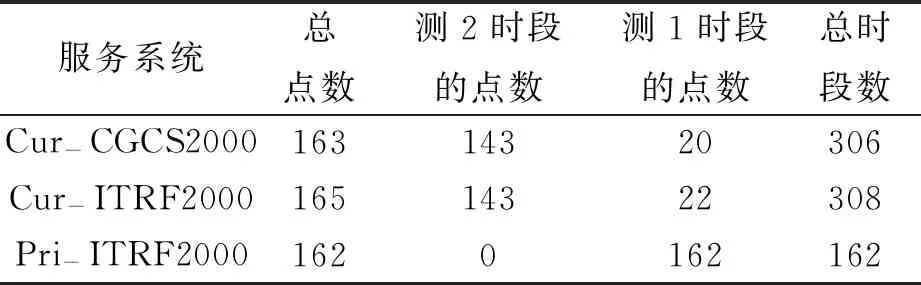
表4 各服务系统的接入观测情况
测试区域和测试点的分布情况如图1所示
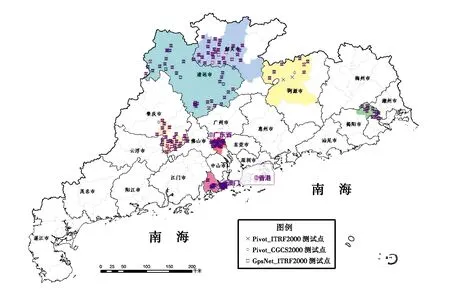
图1 测试区域和测试点分布示意图
2 实时精密定位精度测试结果分析
2.1 网络RTK定位精度分析
网络RTK定位精度统计可以分为内符合精度评定、重复性精度评定、外符合精度评定三个部分;并在此基础上对新平台与原平台的坐标精度进行了比对分析. 囿于篇幅,不在此赘述各指标的具体计算公式[2].
2.1.1 内符合与重复性精度分析
本次测试的3种服务系统各自内符合与重复性精度分别如表5~6所示.

表5 内符合精度统计表

表6 重复性精度统计表
表注:Pri-ITRF2000系统仅观测了一个时段,故不统计重复性精度指标.
新平台在内符合精度方面,平面精度优于1 cm,高程精度优于2 cm;重复性精度方面,平面精度优于1 cm,高程精度优于2 cm. 结果表明,新平台所提供的实时观测数据质量及定位服务精度在不同坐标系统、不同端口下是一致的;与原平台比较,两者在内符合、重复性精度方面均处于同等水平.
2.1.2 新平台与原平台比对分析
在ITRF2000空间直角坐标系(2006.9历元),保证测试点在Cur-ITRF2000、Pri-ITRF2000至少各有一个时段观测的前提下,将观测数据合并在一起进行内符合和重复性检验,结果如表7所示.

表7 ITRF2000下新平台&原平台精度统计表
总共有152点436个有效时段参与统计计算,其中132点观测了3个时段(即新平台观测2时段,原平台观测1时段),占87%,20点观测2个时段(即新平台与原平台各观测1时段),占13%.
又将上述152点分别在Cur-ITRF2000、Pri-ITRF2000下的观测位置成果进行高斯投影平面坐标、大地高两项比较,结果如表8所示.

表8 ITRF2000下新平台与原平台位置较差精度统计表
新平台与原平台平面较差中误差、大地高较差中误差均优于5 cm,达到了测试预期精度.
因此,新平台和原平台的内符合精度、重复性精度以及两者在平面位置与大地高较差结果表明,两套独立平台在同一坐标框架下提供的网络RTK服务测量成果无差别. 因此,新平台的可用性良好,且与原平台有良好的契合度,可完全提供原平台的服务功能.
2.1.3 新平台外符合精度统计
在上述测试点中,最后收集到了57个控制点已有的CGCS2000成果(其中GPS-C级点34个,GPS-D级点21个,GPS-E级点2个)作为本次网络RTK测试的外符合精度检核点[3]. 外符合精度检核点上接入Cur-CGCS2000获得网络RTK测量结果与已知CGCS2000成果的较差情况如图2所示.
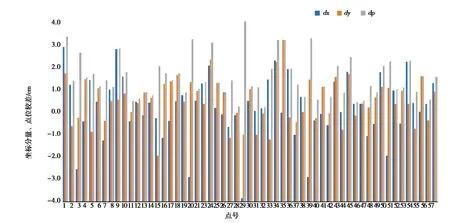
图2 CGCS2000外符合精度较差情况
外符合精度统计情况如表9所示.
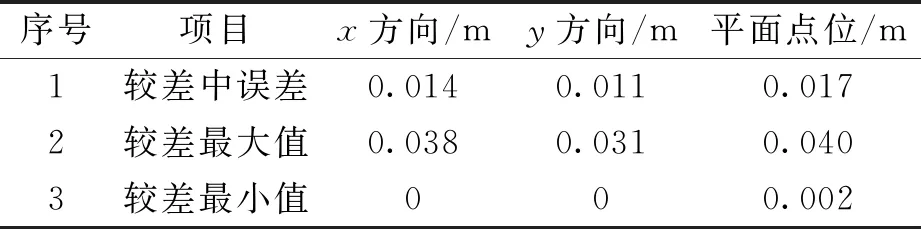
表9 CGCS2000外符合精度统计表
表注:坐标分量较差按绝对值统计.
可见,所有点位较差均小于5 cm,点位较差最大值为4.0 cm;其中45个点的点位较差小于2.0 cm,占79%;12个点位较差在2.0~4.0 cm,占21%;误差区间分布符合正态分布. 整体上,Cur-CGCS2000测试点位外符合平面点位中误差为±1.7 cm. 新平台的定位结果可靠,精度良好.
2.2 网络RTK定位初始化时长分析
初始化时长是指流动站全球导航卫星系统(GNSS)接收机接入GDCORS到获得固定解所经历的时间. 初始化时长受GNSS接收机、观测环境、卫星信号、网络信号等多种因素的影响[4-5]. 目前,初始化时长尚无明确的阈值要求. 但初始化时间的长短反映了用户获得固定解的速率,是综合因素作用下连续运行参考站(CORS)系统服务可用性和生产效率高低的直接反映,也是基于心理等待时间的用户体验良好与否的直观感受.
本次测试中,记录了各测试点GNSS接收机在接入Cur-CGCS2000、Cur-ITRF2000、Pri-ITRF2000三种服务状态的初始化时长数据,最终获得62组共186个有效数据(同时具有三种服务状态的数据为有效数据). 初始化时长数据具体如图3所示.

图3 初始化时长情况图
对3种服务状态的初始化时长分别进行最长时长、最短时长和平均时长的统计,并将多星系统初始化时长汇总一起进行相应统计,各服务状态的初始化时长统计结果如表10所示.
根据上述统计结果,结合网络RTK测量特点,我们认为在初始化等待过程中,30 s的初始化时长是无需等待的范畴,属于极佳的用户体验;并人为设定120 s(2 min)为基于心理时间的初始化等待时间阈值,是一个可接受的等待范畴,超过等待时间阈值后将导致测量员产生不良情绪. 据此对各服务状态的初始化时长区间分布统计结果如表11和图4所示.

表10 初始化时长统计结果

表11 初始化时长区间分布统计结果

图4 初始化时长区间分布统计图
所有186个初始化时长中,最长时长为550 s(不超过10 min),最短时长为1.5 s;其中180个数据在100 s之内,仅有6个数据超过100 s. 原平台单星系统平台总平均时长为33 s, 新平台多星系统平台总平均时长为16 s. 从区间分布统计结果来看,多星系统平台初始化时长更集中在不超过30 s的区间.
3 结束语
本次测试结果符合测试方案要求,达到了预期的精度指标;GDCORS兼容多星系统的北斗地基增强平台(新平台)具有以下特点:
1) 平台软件支持RTCM v2.x/3.x,CMR/CMR+等各种国际标准、行业标准的差分数据格式,移动终端兼容性、可用性良好.
2) 平台提供的网络RTK实时定位服务,在坐标框架和定位精度上与原平台系统是相容的,一致的.
3) 平台可以直接在2000国家大地坐标系(CGCS2000)下发布服务,定位结果更为直接,减少了坐标转换环节.
4) 多星系统在初始化时长的各个指标上均优于单星系统,表明同等条件下多星系统可以更快获得固定解,减少了用户等待时间,提高了生产效率,用户体验更好.
综上所述,GDCORS兼容多星系统的北斗地基增强平台的定位结果可靠、精度优良,可正式提供网络RTK服务.
猜你喜欢
国际太空(2021年11期)2022-01-19
地理教育(2019年1期)2019-03-06
综艺报(2018年17期)2018-09-14
中国化妆品(2017年12期)2017-06-27
考试周刊(2016年94期)2016-12-12
中国文化遗产(2009年6期)2009-01-11