
电液伺服缸导向套静压支承结构特性分析
2020-05-21 03:31邵俊鹏李景钵孙桂涛
哈尔滨理工大学学报 2020年1期
邵俊鹏 李景钵 孙桂涛
摘 要:液压四足机器人作为典型的仿生足式步行机器人,因其具有高机动性、强负载能力和运动平稳等特点而备受人们的关注。电液伺服缸作为其动力执行元件,要求具有低摩擦、良好的抗侧向负载能力和高速运动的特性。以静压支承结构液压缸导向套为研究对象,利用FLUENT软件对静压支承导向套的矩形和工字形油腔的油膜特性进行分析对比,分析了活塞杆移动速度、偏心量与油膜承载能力、摩擦力、泄漏量之间的关系以及进油流量与油膜承载能力、摩擦力和进口压力与泄漏量之间的关系,为优化静压支承结构参数提供了理论依据。
关键词:液压四足机器人;电液伺服缸;静压支承结构;导向套;油膜特性
DOI:10-15938/j-jhust-2020-01-001
中图分类号: TH137-51
文献标志码: A
文章编号: 1007-2683(2020)01-0001-08
Abstract:As a typical bionic foot walking robot, hydraulic quadruped robot has attracted much attention due to its high mobility, strong load capacity and smooth motionThe electro-hydraulic servo cylinder, as its power actuating element, requires low friction, good resistance to lateral load and high speed motionThe research object of this paper is the hydrostatic sealing hydraulic cylinder guide sleeveThe oil film characteristics of the rectangular oil cavity and the I-shaped oil cavity of the hydrostatic bearing guide sleeve are analyzed and compared with the FLUENT softwareThe relationship between piston rod movement speed and eccentricity and oil film bearing capacity, friction and leakage is analyzedThe relationship between inlet flow rate and oil film bearing capacity, friction force and inlet pressure and leakage volume is analyzedIt provides a theoretical basis for optimizing the static pressure bearing seal parameters-
Keywords:hydraulic quadruped robot; electro-hydraulic servo cylinder; static pressure bearing seal; guide sleeve; characteristics of oil film
0 引 言
液壓驱动四足机器人作为典型的仿生足式步行机器人,因其具有高机动性、强负载能力和运动平稳等特点而备受人们的关注。液压伺服技术作为液压驱动四足机器人的关键技术,要求具有响应快、精度高、抗污染能力强,能够适应惯性负载和工作寿命长等特点[1]。电液伺服缸作为液压伺服系统的动力执行元件,其性能的好坏直接影响系统的精度和响应速度。与普通液压缸相比,电液伺服缸需要具有摩擦力小,可以承受重载和偏载要求[2]。液压缸设计时,一般只考虑其承受轴向力,而在其两端通过采用铰接的方式来平衡径向力。但在实际工况中,液压缸会承受一定的径向载荷。径向偏载会使液压缸密封处摩擦力增大,影响液压缸的动态响应速度和控制精度,造成低速爬行、密封失效甚至泄漏等问题[2-3]。
国外公司特别重视高性能液压缸的研发,作为全球闻名的伺服液压缸研发、生产制造的专业型企业德国HANCHEN凭借其独特的享有专利权的活塞杆导向及密封方式——间隙密封(servo-float)、塑料组合密封(servo-cop)和静压密封(servo-bear)在国际市场上占有极其重要的地位[4];此外还有德国SCHENCK公司的S2WL系列作动器采用了静压支承技术,促使作动器在高负荷下也可以进行几乎无摩擦力的线性运动[5];德国HYPROSTATIK公司的带有PM控制器静压支承结构,能够使快速运转的主轴轴承也可能承受巨大负荷并具有承受一定的径向负载的能力[6];意大利COBOL公司的静压支承线性作动器、流体动力技术线性作动器更是实现了批量生产和个性化定制[7]。美国TEAM公司开发了基于静压支承结构液压缸的激振实验台,其激振频率可以达到500Hz,满足各种波形振动试验[8]。
与国外成熟的静压支承结构技术相比,国内较多的研究是在活塞上开不同形式的环形密封槽来提高液压缸的密封性能,而采用静压支承结构技术的研究相对较少。因此,为更好的提高液压缸的性能,本文以电液伺服缸静压支承结构导向套为研究对象,利用Fluent软件对静压支承结构导向套的矩形和工字形油腔的油膜特性进行分析对比,分析活塞杆移动速度、偏心量与油膜承载能力、摩擦力、泄漏量之间的关系以及进油流量与油膜承载能力、摩擦力和进口压力与泄漏量之间的关系。
1 静压支承结构的原理
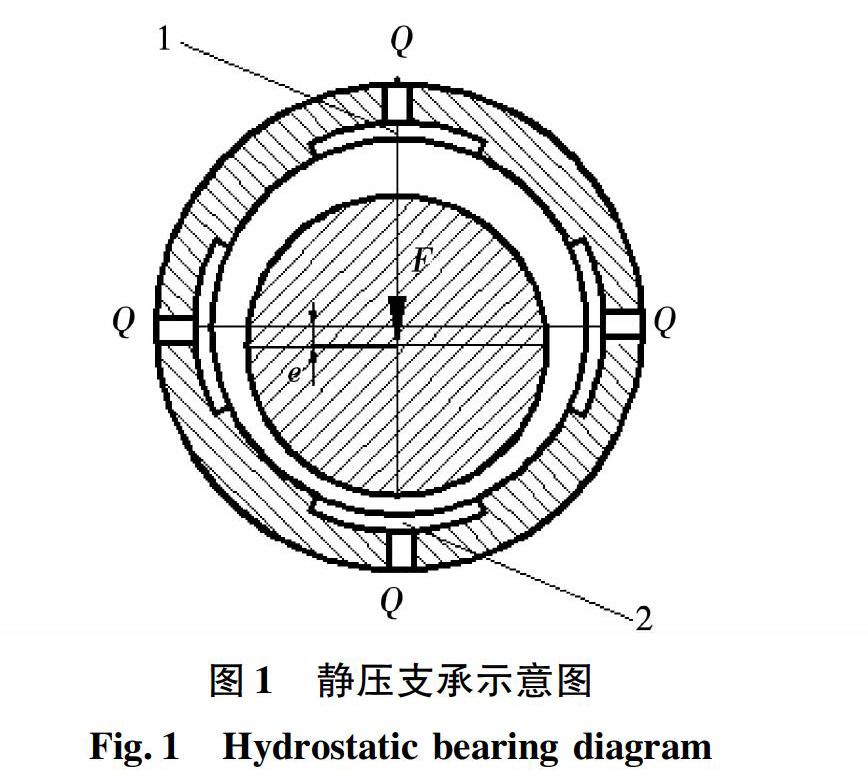
液压缸静压支承结构的原理是液压油流入电液伺服缸导向套后,液压油会“充满”整个静压油腔,形成具有一定压力的静压油膜,静压油腔之间存在压力差,相应的就会产生一定的油膜承载力,这个力能够将活塞杆浮升并且可以承受一定的径向载荷[9-10]。由于活塞杆和导向套之间的间隙非常小,因此液压油在流动的过程中由于液压油存在黏性最终会停止流动,实现活塞杆的密封和导向。
本文提出的静压支承结构采用恒流量供油,即流入每个静压油腔的液压油流量是恒定的[11]。空载(忽略活塞杆自重)时,液压油会在静压油腔内形成具有一定压力的静压油膜充盈在活塞杆和导向套之间,使活塞杆“悬浮”在静压油膜的中心位置上。
若静压油腔与活塞杆之间的间隙量为h,一个静压油腔液压油流出流量为Q,则[10]
Q=Rh36ηlLlRb+2θP(1)
式中:Q为个静压油腔流出的流量;h为静压油腔与活塞杆之间的间隙;P为静压油腔压力;L为静压油腔长度;l为封油边轴向长度;R为导向套内壁半径;θ为静压油腔周向张角;b为封油面周向宽度。
当活塞杆受到径向载荷F时,静压油腔与活塞杆之间的间隙h就会发生变化,由于每个静压油腔的液压油的流入流量恒定,即Q为定值,则由式(1)可知油腔内的压力P与间隙h3成反比,当间隙h发生变化时,油腔压力也会随之改变[10-12]。如图1所示,当活塞杆受到的径向载荷F时,静压油腔2的间隙h就会变小,根据式(1)可知其产生的静压力就会变大,相反静压油腔l的间隙变大,其产生的静压力变小,由此会形成压力差,继而产生一个与F相反的径向力使活塞杆上移,并在中心位置达到平衡[10]。
2 静压油腔模型的建立
电液伺服缸作为液压伺服系统中最常用的动力执行元件,主要是靠活塞的往复运动来实现能量的相互转换,以完成预期的动作[13-14]。而电液伺服缸的导向套在活塞做往复运动时能够起到支承和导向的作用。
在电液伺服缸中,活塞桿与导向套的同心度对其工作性能影响较大,因此对其导向套结构提出了较高的要求。导向套油腔的形状可分为等面积油腔和不等面积油腔,其中,等面积的油腔应用较多,对于同一轮廓尺寸不同形状的油腔,若油腔轴向和周向封油面尺寸相等,则间隙油膜的压力基本相等。本文以矩形油腔和工字形油腔的静压支承导向套为研究对象,其静压油腔结构如图2所示,导向套内壁面上开设4个轴向对称,周向均匀分布的矩形或工字形油腔,在油腔中部各开设有一个进油孔,液压油由电液伺服缸外部系统供给,同时在靠近进油孔的4条油路上分别装有一个可变节流阀。
本文研究静压支承导向套油膜的流场特性,首先借助Pro/E软件建立其偏心量分别为0,3,6,9,12,15μm的静压支承油膜模型,图3为活塞杆与导向套偏心量为0μm时的流场模型,其具体结构尺寸如下:
导向套的宽度:30mm;
压力油膜的内径:28mm,油膜厚度2μm;
进油口直径:2mm,高:3mm;
矩形油腔圆弧度为60°,油腔长20mm,油腔深2mm;
工字形周向油腔圆弧度60°,轴向油腔圆弧度30°,周向油腔长4mm,轴向油腔长12mm,油腔深2mm。
在Pro/E中完成模型的绘制后,导入ICEM进行模型的网格划分。将4个进油孔入口设置为mass-flow-inlet,两端出口设置为pressure-outlet,其余面设置为wall。
3 静压支承导向套的流场压力分析
静压支承油膜的流场压力分析所选用的模型为活塞杆偏心量10μm,各油腔液压油的入口质量0-0003kg/s。图4为静压支承导向套内表面的压力分布云图,由图可知,在周向方向上静压油膜内表面的压力逐渐减小,其中静压油膜下方即活塞杆偏心方向的压力大于其上方的压力,因此在偏心方向上会产生压力差,继而产生一个向上的径向反力使活塞杆上移,以平衡径向载荷引起的径向偏载。
为分析静压支承导向套内沿轴向的压力变化,通过Fluent软件生成的上下两个油腔的压力沿轴向分布坐标图,如图5所示。由图可知,下油腔的压力高于上油腔的压力,下油腔的最高压力为1-34MPa,上油腔的最高压力为0-36MPa。图中与Z轴平行的曲线表示静压油腔内部压力变化曲线,斜线表示周向封油边的压力变化曲线,由此可知,在静压油腔内部压力处处相等,而在轴向上,压力呈现出下降的趋势。
为分析静压支承导向套内沿周向的压力变化,创建模型轴向对称截面(即Z=0平面)。图6为Z=0平面压力分布云图,图7为Z=0平面沿周向方向的压力变化坐标图。图中四段下降的曲线反映了静压支承导向套周向封油面上压力呈下降趋势,即在Z=0平面上连接相邻静压油腔的周向封油面上压力呈下降趋势;周向封油面上压力降的存在说明在相邻静压油腔之间的间隙中液压油由压力高的油腔向压力低的方向流动。
图8为油膜径向速度矢量图,由图可知,径向液压油由压力高的油腔向压力低的方向流动。
图9为工字形油腔油膜的压力分布云图,其油膜压力分布规律与矩形基本相同。另外,工字形油腔会产生两个压力支承环,在对中性上,与矩形油腔相比工字形油腔可以更好的平衡活塞杆上的径向载荷;在活塞杆运动时,双支承环可以更好的提高活塞杆的稳定性。
4 静压支承油膜承载能力分析
与其他类型的液压缸一样,承载能力也是检验静压支承液压缸性能好坏的基本指标。承载能力是指当导向套与活塞杆之间的间隙量一定时,作用于活塞杆外表面的静压油膜静压力所能承受的径向载荷的大小,并且在导向套与活塞杆之间始终保持一定的间隙量,使活塞杆始终“悬浮”在静压油膜上[14-15]。
油膜的承载力F可以由如下公式计算得到[7],即:
式中:Pi为静压油腔压力;Ac为静压油腔的有效承载面积;θi为油腔中心线与载荷方向之间的夹角。
4-1 不同活塞杆速度时承载能力分析
在液压油进口流量(q=0-0003kg/s)、偏心量(e=10μm)一定的条件下,通过仿真研究不同活塞杆运动速度与静压支承油膜承载能力的关系。取活塞杆的速度为0,0-05,0-10,0-15,0-20,0-25,0-30m/s分析静压支承导向套承载能力的变化。
从图10中可以看出,在液压油进口流量、偏心量一定的条件下,随着活塞杆运动速度的变化,静压支承导向套承载能力的变化不大。在相同条件下,工字形油腔的油膜承载能力大于矩形油腔。
4-2 不同偏心量时承载能力分析
在压力油进口流量(q=0-0003kg/s)一定的条件下,通过仿真研究不同偏心量与静压支承导向套承载能力的关系。因为活塞杆的速度对静压支承导向套承载能力的影响不大,所以设置活塞杆静止,取偏心量为3、6、9、12、15μm 5个模型分析静压支承导向套承载能力的变化。
从图11中可以看出,在压力油进口流量一定的条件下,静压支承导向套承载力随着油膜偏心量的增大而增大。在相同条件下,工字形油腔的承载能力大于矩形油腔的承载能力。
4-3 不同进口流量时承载能力分析
在偏心量(e=10μm)一定的条件下,通过仿真研究不同进口流量与静压支承导向套承载能力的关系。因为活塞杆的运动速度对静压支承导向套承载能力的影响不大,故设置活塞杆静止,取液压油的进口流量0-0001、0-0002、0-0003、0-0004、0-0005kg/s分析静压支承导向套承载能力的变化。
从图12中可以看出,在偏心量一定的条件下,静压支承导向套承载力随着进口流量的增大而增大。在相同条件下,工字形油腔的油膜承载能力大于矩形油腔。
5 油膜摩擦力分析
静压支承结构中活塞杆“悬浮”在液压油中,活塞杆与导向套之间的摩擦力很小,因此活塞杆所受摩擦力是由液压油膜的剪切作用引起的。而流体剪切应力的大小与活塞杆的运动速度、活塞杆与导向套之间的间隙量大小有关等因素有关,因此除流体的密度和黏性等固有因素外,摩擦力的大小还与活塞杆的运动速度、间隙量的大小等因素有关[16-19]。
油膜所受剪切应力τ可以由式计算得到[7,10]:
式中:e为密封间隙量;ΔP为两端液压油压力差;μ为液压油动力粘度;L为静压油膜轴向长度;v为活塞杆运动速度。
活塞杆所受摩擦力F由剪切应力乘以活塞杆表面积得到[10]:
由此可知,静压支承结构中活塞杆所受的摩擦力一部分是由静压支承结构进出油口之间的压力差引起,一部分是由液压油膜的剪切作用引起。
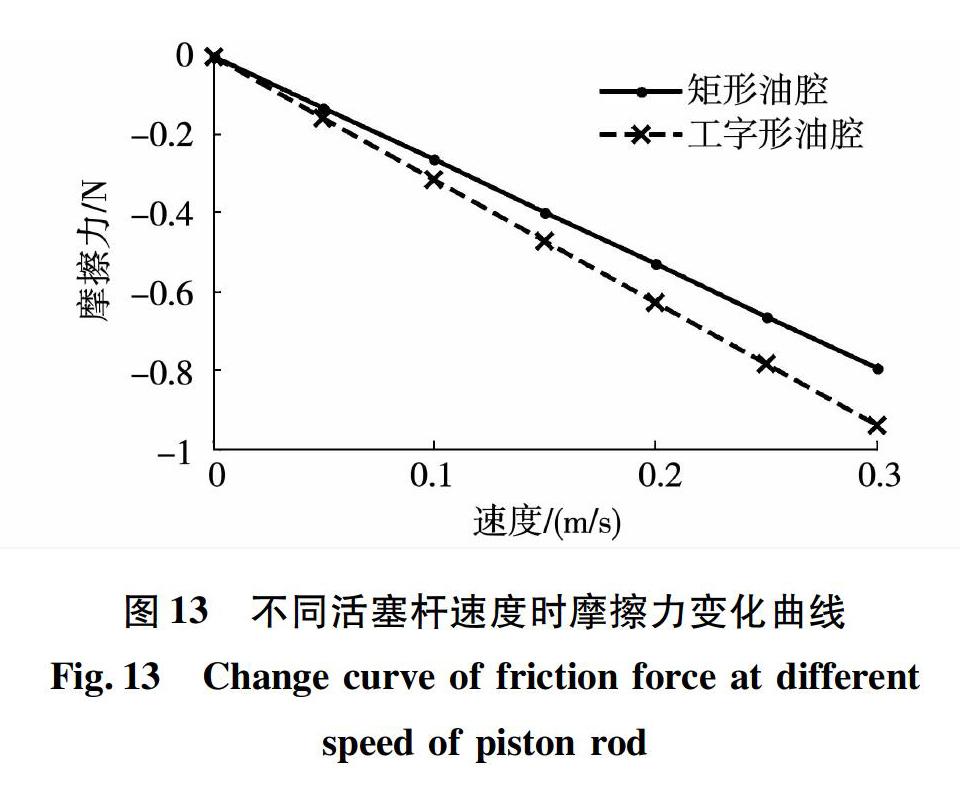
5-1 不同活塞杆速度时摩擦力分析
在液压油进口流量(q=0-0003kg/s)、偏心量(e=10μm)一定的条件下,通过仿真研究不同活塞杆运动速度与静压支承导向套摩擦力的关系。取活塞杆的速度为0,0-05,0-10,0-15,0-20,0-25,0-30m/s分析静压支承导向套摩擦力的变化。其中,负号表示油膜摩擦力的方向与活塞杆运动方向相反。
5-2 不同偏心量时摩擦力分析
在液压油进口流量(q=0-0003kg/s)、活塞杆速度(V=0-3m/s)一定的条件下,通过仿真研究不同偏心量与静压支承导向套摩擦力的关系。取偏心量为3、6、9、12、15μm 5个模型分析静压支承导向套摩擦力的变化。其中,负号表示油膜摩擦力的方向与活塞杆运动方向相反。
5-3 不同进口流量时摩擦力分析
在偏心量(e=10μm)、活塞杆速度(V=0-3m/s)一定的条件下,通过仿真研究不同进口流量与静压支承导向套摩擦力的关系。取进口流量0-0001、0-0002、0-0003、0-0004、0-0005kg/s分析静压支承导向套摩擦力的变化。其中,负号表示油膜摩擦力的方向与活塞杆运动方向相反。
从图15中可以看出,在偏心量、活塞杆速度一定的条件下,进口流量对静压支承导向套摩擦力的影响不大。在相同条件下,工字形油腔的油膜摩擦力大于矩形油腔。
6 油膜泄漏量分析
活塞杆与导向套之间的间隙、油膜进出口压力差的存在或间隙相对运动时引起的液压油流动是产生泄漏的重要原因,因此泄漏量包括由纯压差引起的泄漏量和由间隙的相对运动引起的剪切泄漏量。油膜的泄漏量Q可以由如下计算得到[7,20]:
式中:h为密封间隙;d为油膜内圆直径;ΔP为压差;μ为动力粘度;L为油膜轴向长度;V为密封面运动速度。
其中,当密封面运动方向与压差引起的液压油流动方向相同时取正,反之则取负。
6-1 不同活塞杆速度时泄漏量分析
在压力油进口流量(q=0-0005kg/s)、偏心量(e=10μm)一定的条件下,通过仿真研究不同活塞杆速度与静压支承导向套泄漏量的关系。取活塞杆的速度为0、0-05、0-10、0-15、0-20、0-25、0-30m/s分析静压支承导向套泄漏量的变化。其中,负号表示泄漏量的方向与活塞杆运动方向相反。
从图16中可以看出,静压支承导向套左右两端出口的泄漏量随着活塞杆速度的变化而变化。由于活塞杆向左运动形成剪切流,因此随着活塞杆运动的速度增大,右端出口的泄漏量逐渐减小,甚至接近于零,而左端出口的泄漏量逐渐增大。相同条件下,矩形和工字形油腔的泄漏量差异不大。
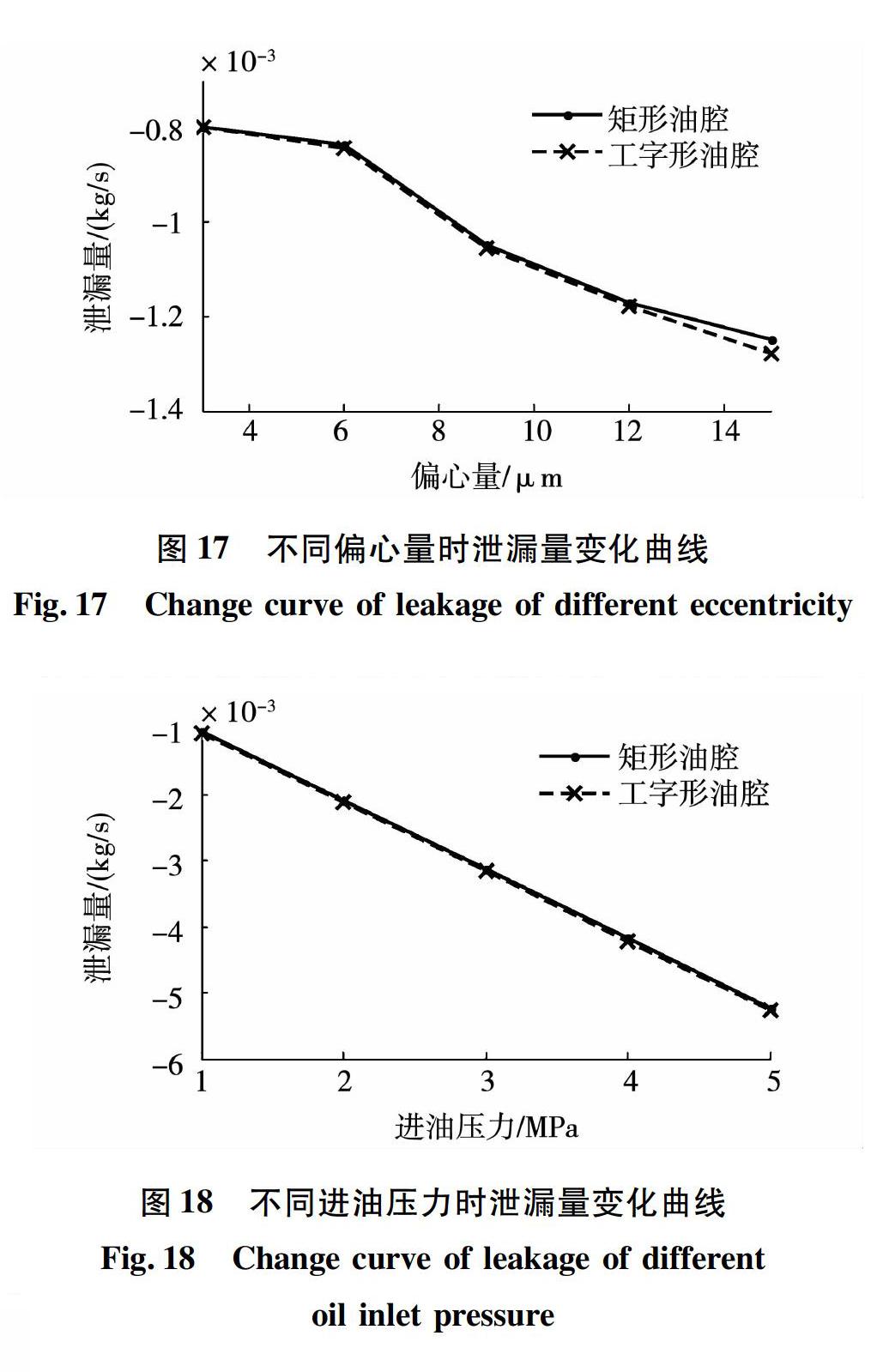
6-2 不同偏心量时泄漏量分析
在进油压力(p=1MPa)、活塞杆速度(V=0-3m/s)一定的条件下,通过仿真研究不同偏心量与静压支承导向套泄漏量的关系。取偏心量为3、6、9、12、15μm 5個模型分析静压支承导向套泄漏量的变化。其中,负号表示泄漏量的方向与活塞杆运动方向相反。
6-3 不同进油压力时泄漏量分析
在偏心量(e=10μm)、活塞杆速度(V=0-3m/s)一定的条件下,通过仿真研究不同进油压力与静压支承导向套泄漏量的关系。取进口流量为1、2、3、4、5MPa分析静压支承导向套泄漏量的变化。其中,负号表示泄漏量的方向与活塞杆运动方向相反。
从图18中可以看出,在偏心量、活塞杆速度一定的条件下,静压支承导向套泄漏量随着进油压力的增大而增大。在相同条件下,工字形油腔的泄漏量与矩形油腔的泄漏量相差不大。
7 结 论
1)静压支承导向套具有有效抵抗活塞杆径向方向的位移的能力;工字形油腔与矩形油腔相比,会产生两个压力支承环,可以更好的平衡由于活塞杆的倾斜产生的径向力,提高活塞杆的稳定性。
2)静压支承导向套承载力受活塞杆速度的影响不大,受偏心量和进口流量的影响较大,承载力随着偏心量和进口流量的增大而增大;相同条件下,工字形油腔的油膜承载能力比矩形油腔大。
3)静压支承导向套摩擦力受进口流量的影响不大,受活塞杆速度和偏心量的影响较大,摩擦力随着活塞杆速度和偏心量的增大而增大;相同条件下,工字形油腔的油膜摩擦力比矩形油腔大。
4)静压支承导向套泄漏量受活塞杆速度、偏心量和进油压力的影响,泄漏量随着偏心量和进油压力的增大而增大;在相同条件下,工字形油腔的泄漏量与矩形油腔的泄漏量相差不大。
参 考 文 献:
[1] 牛晓阳.液压缸静压支承导向套性能研究[D].武汉:武汉科技大学,2014.
[2] 陈昶龙.基于Fluent软件的伺服液压缸静压支承结构流场仿真[D].武汉:武汉科技大学,2012.
[3] 訚耀保,陶陶,朱康武,等.抗偏载液压缸静压支承特性研究[J].流体传动与控制,2016(6):12.
YAN Yaobao, TAO Tao, ZHU Kangwu, et al. Research on Static Pressure Support Characteristics of Anti-eccentric Load Hydraulic Cylinder[J]. Fluid Power Transmission & Control, 2016(6):12.
[4] GROCHMAL TR, FORBRICH CP, LYNCH AF. Nonlinear Bearing Force and Torque Model for a Toothless Self-Bearing Servomotor[J]. IEEE Transactions on Magnetics, 2008, 44(7):1805.
[5] KASSFELDT E. Analysis and Design of Hydraulic Cylinder Seals[D]. Lule Tekniska Universitet, 2016.
[6] EVANS J, MULLER HK, SCHEFZIK C, et al. Enhanced Performance With Laser-etched Seal Face Technology[J]. Sealing Technology, 1997(48):7.
[7] 侯晓帅,赵则祥,于贺春,等.几何误差对多孔质气静压轴承性能的影响[J]. 制造技术与机床,2016(7):35.
HOU Xiaoshuai, ZHAO Zexiang,YU Hechun, et al. Effect of Geometric Error on the Performance of Porous Aerostatic Bearing[J].Manufacturing Technology & Machine Tool,2016(7):35.
[8] SHAO Junpeng, ZHANG Yanqin, LI Yonghai. Influence of Load Capacity on Hydraulic Journal Support Deformation in Finite Element Calculation[J]. Journal of Central South University of Technology: English Edition, 2008, 15(S2): 245.
[9] 鐘洪,张冠坤.液体静压动静压轴承设计使用手册[M].北京:电子工业出版社,2006.
[10]邵俊鹏,张艳芹,李鹏程.基于FLUENT的静压轴承椭圆腔和扇形腔静止状态流场仿真[J].润滑与密封,2007(1):93.
SHAO Junpeng , ZHANG Yanqin, LI Pengcheng. FLUENT-based Static Flow Field Simulation of Elliptical Cavity and Fan Cavity[J].Lubrication Engineering, 2007(1):93.
[11]张艳芹,陈瑶,范立国,等.四种油腔形状重型静压轴承承载性能理论分析[J].哈尔滨理工大学学报,2013(2):68.
ZHANG Yanqin, CHEN Yao, FAN Liguo,et al. Theoretical Analysis of Load Bearing Performance of Four Types of Oil Cavity Shape Heavy-duty Hydrostatic Bearings [J]. Journal of Harbin University of Science and Technology,2013(2):68.
[12]邢玉龙.液压缸精密驱动单元实验研究[D]. 天津:天津理工大学,2015.
[13]鲁腊福,陈昶龙,曾良才,等.间隙密封液压缸活塞杆静压支承特性仿真分析[J].液压与气动,2012(12):126.
LU Lafu, CHEN Yonglong, ZENG Liancai, et al. Simulation Analysis of Static Pressure Support Characteristics of Piston Rod of Gap Sealed Hydraulic Cylinder[J].Chinese Hydraulics & Pneumatics, 2012(12):126.
[14]周梓荣,彭浩舸,曾曙林.环形间隙中泄漏流量的影响因素研究[D].润滑与密封,2015:7-9.
[15]MITIDIERI P, GOSMAN A D, LOANNID E, et al. CFD Analysis of a Low Friction Pocketed Pad Bearing[J]. Journal of Tribology. 2005,127(4): 803.
[16]吴晓明,赵子良,郑树伟,等.活塞杆非接触密封在伺服液压缸中的应用及其对系统低速稳定性的影响[J].机床与液压,2015(7):71.
WU Xiaoming, ZHAO Ziliang, ZHENG Shuwei, et al. Application of Non-contact Seal of Piston Rod in Servo Hydraulic Cylinder and Its Influence on Low Speed Stability of the System [J]. Machine Tool & Hydraulics, 2015(7):71.
[17]VERMES G. A Fluid Mechanics Approach to the Labyrinth Seal Leakage Problem[J]. Journal for Engineering for Power,2001,83(2):161.
[18]SATISH S, RAGHUVIR P. Dynamic Characteris-tics of a Single Pad Externally Adjustable Fluid Film Bearing[J]. Industrial Lubrication and Tribology, 2011, 63(3):146.
[19]鄭飞龙.轨道路基动力响应原位试验电液伺服激振系统研究[D].武汉:武汉科技大学,2014.
[20]邹伟.TBM推进液压缸动态特性分析与结构参数优化[D].长沙:中南大学,2013.
[21]陈家兑,谢庆生,田丰果,等.液压式气门驱动系统间隙密封泄漏的仿真研究[J].润滑与密封,2014(10):73.
CHEN Jiadui, XIE Qingsheng, TIAN Fengguo,et al. Simulation Study of Gap Seal Leakage in Hydraulic Valve Drive System[J].Lubrication Engineering. 2014(10):73.
(编辑:王 萍)
